ztm2 (850176), страница 5
Текст из файла (страница 5)
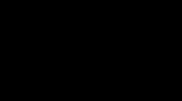
Понятие «момент силы относительно точки» пояснено рисунком 15.1. На нём иллюстрированы оба (и «плюс» и «минус») возможных случая:
59
П
К понятию о моменте силы относительно точки
Рисунок 15.1
 ри этом, удобно использовать механический образ: изображение тела мысленно представляется в виде куска картона с отверстием в точке, относительно которой вычисляется момент. Изображение тела отверстием надето на мысленно вбитый в стол гвоздь без шляпки. Если сила (одиночно действующая - без учёта остальных сил) поворачивает изображение тела против хода часовой стрелки, то момент считается положительным; в противном слу-
ри этом, удобно использовать механический образ: изображение тела мысленно представляется в виде куска картона с отверстием в точке, относительно которой вычисляется момент. Изображение тела отверстием надето на мысленно вбитый в стол гвоздь без шляпки. Если сила (одиночно действующая - без учёта остальных сил) поворачивает изображение тела против хода часовой стрелки, то момент считается положительным; в противном слу- чае (на рис.15.1 сила ![]() ) - отрицательным. Кратчайшее расстояние от точки, относительно которой вычисляется момент, до линии действия силы называют плечом (на рис.15.1:
) - отрицательным. Кратчайшее расстояние от точки, относительно которой вычисляется момент, до линии действия силы называют плечом (на рис.15.1: ![]() - плечо силы
- плечо силы ![]() ,
, ![]() - плечо силы
- плечо силы ![]() относительно точки А).
относительно точки А).
Д
19
ля тела, находящегося под действием плоской системы параллельных сил, можно составить лишь два линейно независимых уравнения равновесия; проще всегоДля тела, находящегося под действием произвольной плоской системы сил можно составить лишь три линейно независимых уравнений равновесия. При этом. принято различать три формы таких уравнений:
п ервая -
ервая - ![]() ,
,
![]() и
и ![]() - произвольные (в плоскости действия сил), взаимно непараллельные оси; А - произвольная в этой плоскости точка.
- произвольные (в плоскости действия сил), взаимно непараллельные оси; А - произвольная в этой плоскости точка.
в торая форма -
торая форма - ![]() ,
,
![]() - произвольная (в плоскости действия сил) ось; А и В - произ-вольные в этой плоскости точки с одним ограничением -
- произвольная (в плоскости действия сил) ось; А и В - произ-вольные в этой плоскости точки с одним ограничением -
- АВ не ![]() ;
;
т ретья форма - ![]() ,
,
А, В, С - произвольные в плоскости действия сил точки, с тем ограничением, что не должны располагаться на одной прямой.
Пренебрежение ограничением приведёт к тому, что из трёх составленных уравнений линейно независимыми окажется лишь два.
60
5.2. Типовые связи и их реакции
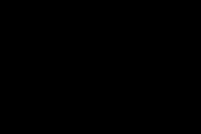
О
Опорная поверхность
дной из наиболее распространённых связей является «опорная поверхность» - см. рис.2, на котором:1 - принятое к рассмотрению тело;
- принятое к рассмотрению тело;
2 - опорная для него поверхность;
Т - плоскость, касающаяся сопряжённых поверхностей в точке их взаимодействия;
![]() - равнодействующая реакции опорной поверхности,
- равнодействующая реакции опорной поверхности, ![]() - её нормальная,
- её нормальная, ![]() - касательная составляющие.
- касательная составляющие.
Ч
Рис.2
аще всеголённости направления - то ли она направлена как показано на рис.2, то ли в противоположную сторону), т.е. ![]() - практически сложно учитываемая величина, но обычно
- практически сложно учитываемая величина, но обычно ![]() <<
<<![]() и неучёт
и неучёт ![]() к существенным погрешностям не приводит.
к существенным погрешностям не приводит.
По указанной причине при решении большинства задач статики составляющей ![]() пренебрегают, используя допущение:
пренебрегают, используя допущение:
15.20
в точках взаимодействия тел реакции расположены нормально к соприкасающимся поверхностям.
точках взаимодействия тел реакции расположены нормально к соприкасающимся поверхностям.
Е
Взаимодействие
рёбрами и точками
сли пользуются допущением 20, то говорят: «гладкая (или идеальная) опорная поверхность». Использование этого допущения не означает, что рассматриваемые в статике методы неточны.М етоды точны, но конкретное их использование иногда может требовать дополнительного изучения исходных данных. Вопросы, связанные с учётом в расчётах составляющей
етоды точны, но конкретное их использование иногда может требовать дополнительного изучения исходных данных. Вопросы, связанные с учётом в расчётах составляющей ![]() , будут рассмотрены в подразделе 8.
, будут рассмотрены в подразделе 8.
Если специально не оговорено, то в дальнейшем будут иметься ввиду гладкие опорные поверхности.
Ш
Рис.3
ироко встречаются случаи, когда поверхность взаимодействует с рёбрами и точками – см. рис.3.61
Если специально не оговорено другое, то соприкосновение по рёбрам и точкам рассматривают как гладкие поверхности с малыми радиусами кривизны, т.е. их сводят к предыдущему случаю – к взаимодействию 2-х поверхностей.
При рассмотрении равновесия балок часто встречается «подвижная шарнирная опора» – см. рис.4.
Не менее широко распространено и «шарнирное соединение тел» – рис.5-7.
Варианты изображений подвижной опоры
Варианты изображений цилиндрического шарнира


Рис.5
Рис.4
Рис.5
По своему существу и «подвижная шарнирная опора», и «шарнирное соединение» сводятся к идеальным опорным поверхностям.
Рис. 6 поясняет вопрос о том, почему реакция перпендикулярна оси шарнира и направлена через его центр в неизвестном направлении.
Цилиндрический шарнир – это обобщающее понятие различных конструктивных решений. Одно из них ясно из рис.6, второе – из рис.7. Главным же, сущностью цилиндрического шарнира является беспрепятственность поворота тела относительно связи.
О неопределённости
направления реакции шарнира
Конструктивная разновидность цилиндрического шарнира


Рис.6
Рис.7
Замечание к употреблённому термину «поворот»:
речь идёт о микроповоротах, происходящих по причине деформаций тел от действующих на них сил; ими могут быть единицы угловых минут и даже единицы угловых секунд.
62
П
Сферический шарнир и схематические его изображения
Конструктивные разновидности сферического шарнира
Рис.8
Рис.9
15.22
ри рассмотрении пространственных систем сил широко распространена связь, называемая сферическим (шаровым) шарниром – см. рис.8

15.23
П
Реакции в сферическом шарнире
о своей сущности сферический шарнир – это связь, обеспечивающая трёхкоординатную беспрепятственность поворота одного тела относительно другого. По этой причине связи по рис.9 являются также сферическими шарнирами.Е сли говорить о направлении реакций, то сферический шарнир (как и цилиндрический) – есть опорная поверхность и ясно, что реакция сферического шарнира проходит через центр сферы, но имеет неизвестное (в пространстве) направление. По этой причине реакцию в сферическом шарнире представляют тремя составляющими – см. рис.10.
сли говорить о направлении реакций, то сферический шарнир (как и цилиндрический) – есть опорная поверхность и ясно, что реакция сферического шарнира проходит через центр сферы, но имеет неизвестное (в пространстве) направление. По этой причине реакцию в сферическом шарнире представляют тремя составляющими – см. рис.10.
Ш
Рис.10
ироко распространены в конструкциях шарнирные тела, нагруженные лишь реакциями связей – см. рис.11а (тела AD, BK, CE).И
Двухшарнирные тела и реакции в них
 з аксиомы о равновесии (подраз-дел 3.3) и уже рассмотренных методов без дополнительных рассуждений виден закон о двух силах:
з аксиомы о равновесии (подраз-дел 3.3) и уже рассмотренных методов без дополнительных рассуждений виден закон о двух силах: т
15.24
15.21
ело под действием двух сил может находиться в равновесии тогда, и только тогда, когда эти силы противоположны.П
Рис.11
оэтому:63
у
Реакция нити
 двухшарнирного тела, нагруженного лишь связями, реакции расположены на прямой, проходящей через центры шарниров.
двухшарнирного тела, нагруженного лишь связями, реакции расположены на прямой, проходящей через центры шарниров. Широко распространённой связью является заведомо натянутая нить (трос, верёвка, цепь и т.п.). Из того же закона о двух силах, и также без дополнительных рассуждений, видно:
у
Рис.12
заведомо натянутой нити реак-ция направлена по отображающему её отрезку прямой - см. рис.12.Реакцию одной части нити на другую принято называть «натяжением нити».
Широко распространённой связью является также «заделка конца балки» (кратко - «заделка»; синоним – «жёстко защемлённый конец балки») – см. рис.13.
Р
Заделка и реакции в ней
Рис.13
 аспределённую по поверхности заделанного конца балки систему сил приводят к центру сечения, разделяющему балку на видимую и защемлённую части. Эквивалентом, при этом, в общем случае оказывается силовой винт. Силу
аспределённую по поверхности заделанного конца балки систему сил приводят к центру сечения, разделяющему балку на видимую и защемлённую части. Эквивалентом, при этом, в общем случае оказывается силовой винт. Силу Если балка нагружена плоской системой сил (этот случай в учебном процессе встречается чаще), то ![]() и применяют изображения, представленные на рис.13в и 13г.
и применяют изображения, представленные на рис.13в и 13г.
5.3. Закон о трёх силах
Е сли тело находится в равновесии под действием трёх непараллельных сил, то линии их действия расположены в одной плоскости и имеют общую точку пересечения.
сли тело находится в равновесии под действием трёх непараллельных сил, то линии их действия расположены в одной плоскости и имеют общую точку пересечения.
64
















