ztm8 (850182), страница 2
Текст из файла (страница 2)
![]() - скорость точки В2 относительно полюса А.
- скорость точки В2 относительно полюса А.
Траекторией точки В2 относительно полюса А является дуга окружности радиуса ВА с центром в точке А. Следовательно:
150
![]()
![]()

в
ВА.Используя 1 записываем:

 ;
;
г
Векторное уравнение (г) пока не решается (говорят: содержит 3 неизвестных - ![]() неизвестен ни по направлению, ни по модулю; неизвестен и модуль вектора
неизвестен ни по направлению, ни по модулю; неизвестен и модуль вектора ![]() ; решить уравнение можно лишь при 2-х неизвестных).
; решить уравнение можно лишь при 2-х неизвестных).
Временно оставляем его и переходим к поиску других уравнений.
Теперь за подвижную систему принимаем ![]() (связана с качающейся направляющей 3) и на основании того же закона сложения скоростей записываем:
(связана с качающейся направляющей 3) и на основании того же закона сложения скоростей записываем:
![]() , где
, где
![]() - абсолютная скорость точки В, принадлежащей телу 3. Эта точка неподвижна. Значит
- абсолютная скорость точки В, принадлежащей телу 3. Эта точка неподвижна. Значит ![]() и последнее векторное равенство принимает вид:
и последнее векторное равенство принимает вид:
![]() .
.
Траекторией точки В2 относительно тела 3 является отрезок прямой, параллельный оси ![]() (во времени расположенный на стержне АС). Следовательно:
(во времени расположенный на стержне АС). Следовательно:
![]()
д
АСи уравнение (г) принимает вид:
 .
.
е
Используя приём отрицательного модуля считаем, что ![]() ,
, ![]() и, после проектирования (е) на оси
и, после проектирования (е) на оси ![]() и
и ![]() , получаем:
, получаем:
![]() м/с;
м/с;
![]() м/с, т.е.
м/с, т.е.
151
![]()
ж
м/с;![]() м/с;
м/с;
з

и
дящим в рассматриваемый момент времени по ходу стрелки часов.
Без дополнительных пояснений видно, что
![]()
к
; причёмСкорость точки С находим вновь применяя закон сложения скоростей -
![]() .
.
Скорость ![]() известна и по модулю, и по направлению - см. (а).
известна и по модулю, и по направлению - см. (а).
Теперь о ![]() .- Траекторией точки А относительно системы
.- Траекторией точки А относительно системы ![]() является дуга окружности радиуса АС с центром в точке А, т.е.
является дуга окружности радиуса АС с центром в точке А, т.е. ![]() АС; её модуль определяется по формуле вращательного движения -
АС; её модуль определяется по формуле вращательного движения - ![]() м/с. Итак,
м/с. Итак,
![]()
л
м/с.Получено векторное уравнение ![]() , имеющее две неизвестные.
, имеющее две неизвестные.
С целью закрепления знаний решите его самостоятельно. Будет получено:
![]() м/с,
м/с, ![]() м/с.
м/с.
Переходим к определению ускорений.
Тело 1 относительно неподвижной системы совершает вращательное движение. Поэтому:
![]()
и, в соответствии с формулами вращательного движения:
![]()
 м/с2;
м/с2;
![]()
м
АО и направлен влево-вверх,Т.е. имеем: ![]() .
.
152
На основании закона сложения ускорений:
![]() ; кориолисова (
; кориолисова (![]() ) составляющая ускорения равна нулю (т.к. подвижная система перемещается поступательно, что видно по символу «А»).
) составляющая ускорения равна нулю (т.к. подвижная система перемещается поступательно, что видно по символу «А»).
Т.к. траекторией точки В2 относительно системы «А» является окружность радиуса ВА с центром в точке А, то:
![]()

н
; .
.
Пока полученное уравнение решить нельзя. Вновь используем закон сложения ускорений, но за подвижную теперь принимаем систему «3» - ![]() :
:
![]() . О траектории точки В2 относительно системы «3» уже писалось - отрезок прямой, параллельный оси
. О траектории точки В2 относительно системы «3» уже писалось - отрезок прямой, параллельный оси ![]() (во времени расположенный на стержне АС). Поэтому
(во времени расположенный на стержне АС). Поэтому
![]()

о
АС.модуль же этого вектора:
![]() м/с2. Т.е.
м/с2. Т.е.
 .
.
Замечание:
д
21.2
ля ускорений кориолиса рекомендуем писать не простоНеобходимость делать это видна из рассматриваемого примера. В нём ![]() .
.
Возвращаемся к решению конкретной задачи. Видим: отдельно взятое векторное уравнение (о) как и (н) имеет 3 неизвестные и не может быть решено. Но решение появляется, если их объединить:
153

 .
.
Метод проектирования векторного уравнения на оси встречался неоднократно. Проверьте его усвоенность самостоятельно, проведя соответствующие вычислительные операции. Будет получено: ![]() м/с2.
м/с2.
После этого определяем угловое ускорение ![]() :
:
![]() .
.
При этом получается, что круговая стрелка, изображающая векторы ![]() на плоскости, показывает направление противоположное ходу стрелок часов.
на плоскости, показывает направление противоположное ходу стрелок часов.
Ускорение точки С рекомендуем определить самостоятельно (как это делалось ранее). Будет получено:
![]() (
(![]() м/с2;
м/с2; ![]() м/с2).
м/с2).
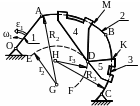
ПРИМЕР 21.2*.- На составление алгоритма кинематического исследования механизма с дугообразными направляющими
Дано: схема, геометрия и положение механизма, изображённого на рис.21.2. В момент времени, соответствующий заданному положению, известны угловые скорость (![]() ) и ускорение (
) и ускорение (![]() ) вращательно-колебательного движения тела 1.
) вращательно-колебательного движения тела 1.
Найти последовательность расчёта, целью которого является определение ускорений ![]()
![]() и
и ![]() . При этом, мы приведен лишь остов алгоритма. Студентам же рекомендуем дополнить его самостоятельным описанием направлений и модулей соответствующих векторов (подобно тому, как это делалось в примере 21.1), а полученные результаты обсудить, вскрывая свои, или товарищей-сокурсников, некорректности и, таким образом, установить истину.
. При этом, мы приведен лишь остов алгоритма. Студентам же рекомендуем дополнить его самостоятельным описанием направлений и модулей соответствующих векторов (подобно тому, как это делалось в примере 21.1), а полученные результаты обсудить, вскрывая свои, или товарищей-сокурсников, некорректности и, таким образом, установить истину.
Пояснения.- О, А, В, С и D - вращательные пары; кривая АВ - это дуга окружности с центром в точке G и радиусом R2; кривая ВС - это дуга окружности с центром в точке H и радиусом R3. Тела 2 и 4, 3 и 5 имеют скользящие соединения,- такие, что: траекторией точки D относительно тела 2 является дуга DE окружности с центром в точке G и радиусом ![]() ; траекторией точки D относительно тела 3 является дуга DF окружности с центром в точке H и радиусом
; траекторией точки D относительно тела 3 является дуга DF окружности с центром в точке H и радиусом ![]() .
.
154
Р
21.3
Схема механизма с дугообразными направляющими
 екомендация: в состав-ляемых векторных урав-нениях удобно в правой части первой записы-вать относительную скорость (ускорение); это позволяет сразу видеть систему отсчёта, принятую за подвиж-ную, что и позволяет быстро записывать последующие векторы.
екомендация: в состав-ляемых векторных урав-нениях удобно в правой части первой записы-вать относительную скорость (ускорение); это позволяет сразу видеть систему отсчёта, принятую за подвиж-ную, что и позволяет быстро записывать последующие векторы. Р
Рисунок 21.2
ешение.- Для нахождения![]() .
.
![]() ;
; ![]() .
.

 .
.

 .
.

 .
.
155
Переходим к ускорениям.-
![]() .
.
 .
.
![]() ;
; ![]() .
.

 .
.
![]() ;
; ![]() .
.

 .
.

 .
.
156
21.2. Метод введения в рассмотрение систем отсчёта, превращающих подвижные оси вращения в неподвижные
Может использоваться для различных механизмов, но наибольшую значимость имеет для зубчато-рычажных. При этом, будущему инженеру, желающему видеть практицизм изучаемых им теорий, важно знать, что рабочие машины, в которых отсутствуют зубчатые передачи, встречаются редко.
С точки зрения кинематического анализа зубчатые передачи можно разделить на 2 класса.
Первый – оси вращения всех зубчатых колёс неподвижны; это так называемые рядовые их соединения, в кинематических исследованиях никаких трудностей не вызывающие – см. примеры 21.3 и 21.4.
Второй класс – зубчато-рычажные механизмы (планетарные, дифференциальные и др.); широко используются в общем редукторостроении, имеются практически в любом автомобиле и тракторе, во многих обрабатывающих станках, подъёмных и других машинах; их особенностью является наличие зубчатых колёс, оси вращения которых подвижны относительно корпусов механизмов.
Подробное ознакомление с зубчато-рычажными механизмами может быть начато с книги «Вулгаков Э.Б. Соосные зубчатые передачи. Справочник.- М.: Машиностроение, 1987.- 256 с.».
Кинематическое исследование зубчато-рычажных механизмов также оказывается несложным, если в рассмотрение введена осенесущая система отсчёта (такая, относительно которой оси вращения зубчатых колёс оказываются неподвижными).
С
21.4
уть метода.- Анализ движения начинают рассматривать с позиций наблюдателя, находящегося в осенесущей системе отсчёта. Это позволяет зубчато-рычажные механизмы (которыми они являются с позиций исследователя, находящегося в неподвижной системе отсчёта) превратить в рядовое соединение зубчатых колёс; их кинематическое исследование элементарно. Переход же от относительного движения к абсолютному осуществляется с помощью закона сложения угловых скоростей.Приложение метода рассмотрим на двух примерах.
ПРИМЕР 21.3.- На пару вращений
Дано.- Схема зубчато-рычажного механизма (см. рис.21.3): слева - главный вид, посередине – вид сбоку; 1 – неподвижное, 2 и 3 подвижные зубчатые колёса; 4 – рычаг (иначе: водило), имеющий 3 оси вращения (О, А, В) для зубчатых колёс.
157
![]() . Справа на рис.21.3 изображён рассматриваемый механизм с позиций исследователя, мысленно поместившего себя в системе отсчёта, связанной с водилом ОАВ.
. Справа на рис.21.3 изображён рассматриваемый механизм с позиций исследователя, мысленно поместившего себя в системе отсчёта, связанной с водилом ОАВ.
Зубчато-рычажный механизм, иллюстрирующий пару вращений

Рисунок 21.3
Установить зависит ли угловая скорость ![]() зубчатого колеса 3 от угловой скорости водила 4. И если зависит, вывести соответствующую формулу.
зубчатого колеса 3 от угловой скорости водила 4. И если зависит, вывести соответствующую формулу.
Решение.- ![]() - угловые скорости 1-го, 2-го и 3-го зубчатых колёс относительно водила (относительно системы отсчёта, в которой оси вращения оказываются неподвижными). Из примеров 18.3 и 18.4 с очевидностью следует:
- угловые скорости 1-го, 2-го и 3-го зубчатых колёс относительно водила (относительно системы отсчёта, в которой оси вращения оказываются неподвижными). Из примеров 18.3 и 18.4 с очевидностью следует:
![]() .
.
Т.к. ![]() , то
, то ![]()
Теперь, 2 раза задействовав закон сложения угловых скоростей, получаем:
![]() ,
,
т.е. 3-е зубчатое колесо относительно неподвижной системы отсчёта совершает поступательное движение - для него ![]() .
.
С
21.5
ложное движение тела, складывающееся из 2-х вращений, таких, что относительная угловая скорость противоположна переносной и равна ей по модулю, называют парой вращений. У пары вращений абсолютным движением является поступательное.158
П
Принципиальная
схема привода ведущих колёс автомобиля
РИМЕР 21.4.- Кинематическое исследование конического дифференциала автомобиляН а рис.21.4: 1 – рама автомобиля; 2 – двига-тель с коробкой передач, приводящий во вращение карданный вал 3 (который имеет 2 шарнира Гука); 5 – конический дифференциал, приводящий во вращение правое (4) и левое (6) ведущие колёса.
а рис.21.4: 1 – рама автомобиля; 2 – двига-тель с коробкой передач, приводящий во вращение карданный вал 3 (который имеет 2 шарнира Гука); 5 – конический дифференциал, приводящий во вращение правое (4) и левое (6) ведущие колёса.
Н
Рисунок 21.4
а рис.21.5, являющимся кинематической детализацией рис.21.4, изображено: 1 – корпус диффе-ренциала (неподвижен относительно рамы автомобиля); 3 – коническая шестерня, приводимая во вращение карданным валом; 4 – правое и 6 – левое ведущие колёса (приводятся в движение одинаковыми коническими колёсами, которым присвоены те же номера - 4 и 6); 7 и 8 – сателлитыКинематические связи конического дифференциала
















