ztm7 (850181), страница 3
Текст из файла (страница 3)
Называют: ![]() ,
, ![]() ,
, ![]() - абсолютной, относительной и переносной угловыми скоростями тела 3. Как они связаны между собою?
- абсолютной, относительной и переносной угловыми скоростями тела 3. Как они связаны между собою?
На этот вопрос отвечает закон сложения угловых скоростей:
![]()

19.12
; иначе -абсолютная угловая скорость тела равна геометрической сумме относительной и переносной её составляющих.
Замечание: математическая запись закона 19.12 идентична той, которая в подразделе 19.2 отображала закон сложения линейных скоростей - ![]() . Но чтобы была видна разница в механической сущности применены различные буквы -
. Но чтобы была видна разница в механической сущности применены различные буквы - ![]() и
и ![]() .
.
Теоретический переход от предыдущего материала к закону 19.12 можно основать на законах 19.11 и 19.3, используя ранее рассматривавшиеся методы. Покажем это.-
З
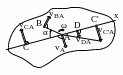
К закону сложения угловых скоростей. Картина после преобразований
акон о единой для тела угловой скорости позволяет перейти к другим принимаемым за полюса точкам тел 2 и 3:139
л
К закону сложения угловых скоростей. Картина после преобразований
омВ результате проведенных преобразований получаем картину, представленную на рис.19.12, где буквой
результате проведенных преобразований получаем картину, представленную на рис.19.12, где буквой ![]() отображены 2 совпадающие в принятый к рассмотрению момент времени точки, одна принадлежит телу 2 (
отображены 2 совпадающие в принятый к рассмотрению момент времени точки, одна принадлежит телу 2 (![]() ), вторая - телу 3 (
), вторая - телу 3 (![]() ).
).
По формулам сферического движения записываем:
![]() ,
,
![]()
Рисунок 19.12
,![]() .
.
Теперь используем закон сложения линейных скоростей -
![]() .
.
Подставляя в последнее выражение 3 предыдущих, получаем:
![]() .
.
![]() - произвольная точка. Это значит, что
- произвольная точка. Это значит, что ![]() может иметь любое направление. Поэтому равенство нулю обеспечивается не параллельностью векторов
может иметь любое направление. Поэтому равенство нулю обеспечивается не параллельностью векторов ![]() и
и ![]() , а тем, что
, а тем, что ![]() .
.
Откуда и следует результат 19.12.
Закон сложения угловых скоростей широко применяется в инженерной практике – для кинематического исследования зубчато-рычажных механизмов (планетарных, дифференциальных и пр.) - см. подраздел 21.2.
140
20. О кинематических исследованиях
плоско движущихся тел и их соединений
методами мгновенных центров скоростей и ускорений
20.1. О существовании мгновенного центра скоростей
Мгновенный центр скоростей (МЦС) - это точка плоской фигуры, скорость которой равна нулю.
Из ранее рассмотренных методов (в числе которых проектирование векторного равенства на ось) вытекает следующий кинематический факт:
в
20.1
любой момент времени при не равной нулю угловой скорости плоско движущаяся фигура имеет один мгновенный центр скоростей.И
О существовании МЦС
 действительно, пусть
действительно, пусть З
Рисунок 20.1
а полюс принимаем точку(т.к. ![]() ), причём
), причём ![]() и, следовательно, проекция этого вектора на ось
и, следовательно, проекция этого вектора на ось ![]() не равна нулю.
не равна нулю.
Спроектировав составленное векторное равенство на ось ![]() , получаем:
, получаем: ![]() , т.е.
, т.е. ![]() и если МЦС есть, то он может находиться лишь на оси
и если МЦС есть, то он может находиться лишь на оси ![]() .
.
Пусть теперь ![]() является произвольной, не совпадающей с
является произвольной, не совпадающей с ![]() , точкой оси
, точкой оси ![]() . Тогда:
. Тогда: ![]() , где
, где ![]() , причём вектор
, причём вектор ![]() и, следовательно,
и, следовательно, ![]() (сонаправлен, либо противоположно направлен
(сонаправлен, либо противоположно направлен ![]() : по одну сторону от точки
: по одну сторону от точки ![]() -
- ![]() , по другую -
, по другую - ![]() ).
).
Ясно, что если и есть МЦС, то надо смотреть те точки оси ![]() , для которых
, для которых ![]() (на рис.1 этим множеством точек является полуось, начинающаяся в
(на рис.1 этим множеством точек является полуось, начинающаяся в ![]() и сонаправленная с вектором
и сонаправленная с вектором ![]() ).
).
141
![]() может иметь любую величину (от нуля до бесконечности). И в этом множестве нет повторяющихся значений, но по причине непрерывности, будет присутствовать значение, для которого
может иметь любую величину (от нуля до бесконечности). И в этом множестве нет повторяющихся значений, но по причине непрерывности, будет присутствовать значение, для которого ![]() и, поэтому,
и, поэтому, ![]() . Т.е. МЦС есть; и он один.
. Т.е. МЦС есть; и он один.
Итак, применяемые методы приводили ранее к правильным, хорошо проверенным результатам, привели к этому и в рассмотренном случае.
2
Картина распределения скоростей точек плоской фигуры
0.2. О распределении скоростей относительно МЦСС
20.2
 корости точек плоской фигуры относительно МЦС распределены таким образом (см. рис.2), будто бы она в заданный момент времени вращается вокруг перпендикуляр-ной ей, проходящей через МЦС, оси, т.е. скорости точек могут определяться по формуле 18.13 -
корости точек плоской фигуры относительно МЦС распределены таким образом (см. рис.2), будто бы она в заданный момент времени вращается вокруг перпендикуляр-ной ей, проходящей через МЦС, оси, т.е. скорости точек могут определяться по формуле 18.13 - Р
Рисунок 20.2
езультат 20.2 прямо следует из подраздела 20.1.20.3. Основные способы определения положений МЦС
К 1-му способу опреде-ления положения МЦС
Первый способ (см. рис.20.3):
е
Рисунок 20.3

20.3
 сли известны угловая скорость (
сли известны угловая скорость (полученном направлении от заданной точки ![]() отложить отрезок
отложить отрезок ![]() ; его концом и окажется МЦС
; его концом и окажется МЦС
(как и 20.2 результат 20.3 виден из рассуждений, проведенных в подразделе
20.1).
142
В
Ко 2-му способу опреде-ления положения МЦС
торой способ (см. рис.20.4):е
20.4
 сли у плоской фигуры известны прямые расположения скоростей двух точек, то их надо повернуть в плоскости фигуры вокруг заданных точек на 90о; пересечение
сли у плоской фигуры известны прямые расположения скоростей двух точек, то их надо повернуть в плоскости фигуры вокруг заданных точек на 90о; пересечение в
Рисунок 20.4
К 3-му способу опреде-ления положения МЦС
торой способ прямо следует из тех уже установленных фактов, что скорость точки перпендикулярна радиус-вектору и плоская фигура имеет лишь один МЦС.Третий способ (см. рис.20.5):
е
20.5
 сли скорости точек плоской фигуры параллельны и не равны, то её МЦС находится на пересечении (
сли скорости точек плоской фигуры параллельны и не равны, то её МЦС находится на пересечении (Р
Рисунок 20.5
езультат 20.5 прямо следует из 20.2. Причём, если всё делается корректно, то ясно, что проходящая через заданные точки прямая перпендикулярна скоростям.Ч
К 4-му способу опреде-ления положения МЦС
етвёртый способ (см. рис.20.6):М
20.6
 ЦС катящегося без проскальзы-вания колеса находится в точке его соприкосновения (
ЦС катящегося без проскальзы-вания колеса находится в точке его соприкосновения (20.4. Начальные сведения о центроидах
М
Рисунок 20.6
гновенный центр скоростей потому и «мгновенный», что с течением времени изменяет своё положение.Геометрическое место МЦС на плоской фигуре называют подвижной центроидой.
Ту точку неподвижной плоскости, в которой в рассматриваемый момент времени расположен МЦС, называют мгновенным центром вращения.
Геометрическое место мгновенных центров вращения на неподвижной плоскости называют неподвижной центроидой.
143
Понятия подвижной и неподвижной центроид широко используют в теории зубчатых зацеплений, где, в частности, доказывается, что «подвижная центроида обкатывается по неподвижной без скольжения».
20.5. О мгновенном поступательном движении плоской фигуры
Из аксиомы о гладкости траекторий (с.95) и из связи между линейными и угловыми скоростями с очевидностью следует: угловые скорости являются плавно изменяющимися во времени величинами, т.е. при изменении направления вращения плоской фигуры её угловая скорость обязательно проходит через нуль.
Ту бесконечно малую во времени часть плоского движения, когда угловая скорость фигуры бесконечно мало отличается от нуля, называют мгновенным поступательным движением. Из рассмотренного в подразделах 20.1 и 20.2 с очевидностью следует:
п
20.7
ри мгновенном поступательном движении все точки плоской фигуры имеют одинаковые скорости, а её МЦС расположен в бесконечности.20.6. Примеры кинематического исследования простых плоских механизмов с использованием понятия МЦС
П
К условию и решению примера 20.1
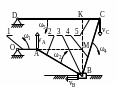 РИМЕР 20.1.- На использование понятия МЦС для определения угловой скорости ведомого звена простого пятизвенного стержневого механизма
РИМЕР 20.1.- На использование понятия МЦС для определения угловой скорости ведомого звена простого пятизвенного стержневого механизма Даны схема, геометрия и положение механизма (см. рис.20.7): ![]() ;
; ![]() см;
см; ![]() см;
см; ![]() см;
см; ![]() см;
см; ![]() см;
см; ![]() см.
см.
Определить угловую скорость тела 5.
Р
Рисунок 20.7
ешение.- Будем иметь ввиду, что ![]()

а
. Находим мгновенный центр скоростей для звена 2. Для этого, используя очевидность траекторий точек ![]() и
и ![]() , устанавливаем их скорости:
, устанавливаем их скорости: ![]() направлена вертикально вверх,
направлена вертикально вверх, ![]() горизонтально. Тогда, на основании 2-го
горизонтально. Тогда, на основании 2-го
144
















