ztm6 (850180), страница 2
Текст из файла (страница 2)
зываний, т.е. обеспечивая равенство нулю скоростей точек ![]() ;
; ![]() - центр поворота – точка пространства, оказывающаяся (при движении автомобиля по рассматриваемому закруглению) центром сферического движения и 1-го, и 3-го колёс;
- центр поворота – точка пространства, оказывающаяся (при движении автомобиля по рассматриваемому закруглению) центром сферического движения и 1-го, и 3-го колёс; ![]() и
и ![]() - их мгновенные оси вращения,
- их мгновенные оси вращения, ![]() и
и ![]() - угловые скорости.
- угловые скорости.
Если бы колёса 1 и 3 были закреплены на одной оси, то покрышки на поворотах катились бы по дороге с проскальзываниями и быстро изнашивались.
119
Формула 18.19 и проведенный её анализ позволяют дать следующую рекомендацию по определению скоростей точек сферически движущегося тела:
с
18.21
корости точек сферически движущегося тела в любой момент времени распределены как при вращательном движении, осью которого является мгновенная ось, а угловая скорость равна угловой скорости сферического движения;пример применения результата 18.21 см. в примере 18.6.
18.3.3. Ускорения точек сферически движущегося тела
![]() . Итак, получена
. Итак, получена
в
18.22
екторная формула, выражающая ускорения точек сферически движущегося тела через угловые скорость и ускорение ![]() .
.
Несмотря на то, что получена точно такая же формула, как и для вращательного движения, отличия имеются. И существенные. Рассмотрим их.
При вращательном движении тела вокруг оси вектор ![]() всё время расположен на оси вращения (если условиться его начинать из какой-либо точки этой оси), т.е. его годограф, и поэтому угловое ускорение, также расположены на
всё время расположен на оси вращения (если условиться его начинать из какой-либо точки этой оси), т.е. его годограф, и поэтому угловое ускорение, также расположены на
о
При сферическом движенеии ![]() не
не![]()
 си вращения (
си вращения (в
18.23а
ектор углового ускоренияС
Рисунок 18.18
математической точки зрения связив
18.23б
ектор углового ускорения равен скорости конца вектора угловой скорости, при условии, что его начало (на рис.18.18 - полюс) неподвижно.Часто вектор угловой скорости сферически движущегося тела постоянен по модулю и вращается вокруг неподвижной оси (описывает поверхность прямого
120
к
Вычисление ![]() . Случай 18. 23в
. Случай 18. 23в
 ругового конуса – см. ниже пример 6). В этом случае вектор
ругового конуса – см. ниже пример 6). В этом случае вектор
18.23в
![]()
 .
.
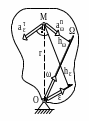
М
Рисунок 18.19
Составляющие ускорения сферически движущегося тела
атематическая одинаковость формул для вычис-ления ускорений при вращательных движениях вокруг оси и точки (формулы 18.15 и 18.22), с учётом их отли-чия по содержанию, рассмотренного в 18.23 (а-б-в), поз-воляют рекомендовать трёхшаговую процедуру вычис-ления ускорения точек сферически движущегося тела:1 . Тело предполагается в рассматриваемый момент времени вращающимся вокруг неподвижной оси, совпадающей с мгновенной осью вращения
. Тело предполагается в рассматриваемый момент времени вращающимся вокруг неподвижной оси, совпадающей с мгновенной осью вращения ![]() (см. рис.18.20); при таком предположении определяется нормальная составляющая ускорения – по формуле
(см. рис.18.20); при таком предположении определяется нормальная составляющая ускорения – по формуле ![]() ; направлена она перпендикулярно
; направлена она перпендикулярно ![]() и пересекает её;
и пересекает её; ![]() называют осестремительной составляющей ускорения;
называют осестремительной составляющей ускорения;
2
18.24
 . Тело предполагается вращающим-ся вокруг неподвижной оси, проходящей через центр сферического движения па-раллельно
. Тело предполагается вращающим-ся вокруг неподвижной оси, проходящей через центр сферического движения па-раллельно 3
Рисунок 18.20
. Полное ускорение точки равно сумме осестремительной и вращатель-ной составляющих -121
П
Кинематика конической шестерни, обегающей непод-вижное зубчатое колесо
РИМЕР 18.6.- На кинематику сферического движения телаД ано.- Водило 1 вращается (рис.18.21) вокруг неподвижной вертикальной оси
ано.- Водило 1 вращается (рис.18.21) вокруг неподвижной вертикальной оси ![]() с постоянной угловой скоростью
с постоянной угловой скоростью ![]() ; 2 – подвижное и 3 – неподвижное конические зубчатые колёса;
; 2 – подвижное и 3 – неподвижное конические зубчатые колёса; ![]() м;
м; ![]() .
.
Определ. скорость и ускорение точки ![]() .
.
Р
Рисунок 18.21
ешение.- Тело 2 (шестерня) совершает сферическое движение вокруг центрамгновенная ось вращения тела 2. В рассматриваемый момент времени точка ![]() движется в направлении зрачка читателя. Поэтому (в соответствии с 18.19) вектор
движется в направлении зрачка читателя. Поэтому (в соответствии с 18.19) вектор ![]() направляем от
направляем от ![]() к
к ![]() .
.
Модуль скорости точки ![]() , принадлежащей вращательно движущемуся телу 1:
, принадлежащей вращательно движущемуся телу 1:
![]() .
.
Модуль скорости точки ![]() , принадлежащей сферически движущемуся телу 2:
, принадлежащей сферически движущемуся телу 2:
![]() .
.
Точки ![]() и
и ![]() совпадают во времени. Поэтому
совпадают во времени. Поэтому ![]()
![]() .
.
Исходя из тех же результатов 18.19 и 18.21 находим скорость точки ![]() :
:
![]() м/с
м/с
и направлена она перпендикулярно плоскости чертежа в сторону зрачка читателя.
Мгновенная ось вращения ![]() тела 2 и водило
тела 2 и водило ![]() расположены (в функции времени) в одной вертикальной плоскости
расположены (в функции времени) в одной вертикальной плоскости ![]() , что позволяет заключить:
, что позволяет заключить:
122
исходящий из точки ![]() , постоянный по модулю вектор
, постоянный по модулю вектор ![]() , вращается вокруг оси
, вращается вокруг оси ![]() с постоянной угловой скоростью
с постоянной угловой скоростью ![]() и, поэтому, траекторией его конца является окружность.
и, поэтому, траекторией его конца является окружность.
Применяя результат 18.23в, находим модуль углового ускорения:
![]() .
.
Направлен вектор углового ускорения (в соответствии с результатом 18.23б) перпендикулярно плоскости чертежа в сторону зрачка читателя, что на рисунке отображено значком ![]() .
.
Используя результат 18.24, определяем:
1. Модуль осестремительного ускорения точки ![]()
![]() м/с2 ;
м/с2 ;
направлен этот вектор ![]() по кратчайшему расстоянию от точки
по кратчайшему расстоянию от точки ![]() к мгновенной оси вращения
к мгновенной оси вращения ![]() ;
;
2. Модуль вращательного ускорения точки ![]()
![]() м/с2 ;
м/с2 ;
расположен вектор ![]() в плоскости чертежа (перпендикулярно и
в плоскости чертежа (перпендикулярно и ![]() , и
, и ![]() ) и, в соответствии с правилом пункта 2 результата 18.24, направлен влево-вверх;
) и, в соответствии с правилом пункта 2 результата 18.24, направлен влево-вверх;
3. Полное ускорение равно геометрической сумме осестремительной и вращательной составляющих – оказалось направленным от ![]() к
к ![]() и по модулю равным 3000 м/с2.
и по модулю равным 3000 м/с2.
123
19. Сложные движения точки и тела
19.1. Понятия об абсолютном, относительном и переносном движениях, скоростях и ускорениях. Обозначения
В общем случае траектория, скорость и ускорение точки относительно различных систем отсчёта различны.
Так, для наблюдателя, находящегося на перроне железнодорожного вокзала, траекторией точки обода колеса отходящего вагона является циклоида; для пассажира траектория этой же точки оказывается окружностью.
Находящийся на эскалаторе человек покоится относительно ступенек, относительно же стен и площадок метро скорость его движения отлична от нуля.
У
К понятиям об абсо-лютном, относительном и переносном движениях
скорение стартующего космонавта относительно корабля практически равно нулю, относительно Земли в несколько раз превосходит ускорение свободного падения тела. П усть
усть ![]() (см. рис.19.1) - как угодно движущаяся точка относительно двух систем отсчёта. Любую из них назовём «неподвиж-ной». Определяемся конкретно – неподвижной называем первую (
(см. рис.19.1) - как угодно движущаяся точка относительно двух систем отсчёта. Любую из них назовём «неподвиж-ной». Определяемся конкретно – неподвижной называем первую (![]() ) систему; синонимы - «основная», или «базовая» система отсчёта. Как здесь, так и в дальнейшем, уславливаемся на рисунках оси неподвижной системы отсчёта выделять примыкаемыми к ним под углами 45о короткими отрезками (штриховкой).
) систему; синонимы - «основная», или «базовая» система отсчёта. Как здесь, так и в дальнейшем, уславливаемся на рисунках оси неподвижной системы отсчёта выделять примыкаемыми к ним под углами 45о короткими отрезками (штриховкой).
Т
Рисунок 19.1
огда вторую систему отсчёта ( Систему ![]() , начало
, начало ![]() которой совпадает с началом (
которой совпадает с началом (![]() ) и которая перемещается поступательно относительно
) и которая перемещается поступательно относительно ![]() назовём «вспомогательной» системой.
назовём «вспомогательной» системой.
Движение точки ![]() относительно неподвижной системы называют абсолютным движением, относительно подвижной – относительным.
относительно неподвижной системы называют абсолютным движением, относительно подвижной – относительным.
Аналогично: «абсолютная скорость точки ![]() » (либо ускорение) – это её скорость (либо ускорение) относительно неподвижной системы отсчёта; «относительная скорость точки
» (либо ускорение) – это её скорость (либо ускорение) относительно неподвижной системы отсчёта; «относительная скорость точки ![]() » (либо ускорение) – это её скорость (либо ускорение) относительно подвижной системы отсчёта.
» (либо ускорение) – это её скорость (либо ускорение) относительно подвижной системы отсчёта.
124
Движение подвижной системы относительно неподвижной называют переносным движением. Говорят, например: «переносным движением является поступательное» (или – вращательное; или – сферическое).
Наиболее простыми получаются математические связи между абсолютными и относительными скоростями (а также ускорениями), если оперировать ещё и понятиями «переносная скорость», «переносное ускорение».
Переносная скорость точки ![]() – это абсолютная скорость той точки подвижной системы, с которой в рассматриваемый момент времени совпадает точка
– это абсолютная скорость той точки подвижной системы, с которой в рассматриваемый момент времени совпадает точка ![]() , т.е. если руководствоваться рис.1, то переносная скорость точки
, т.е. если руководствоваться рис.1, то переносная скорость точки ![]() – это абсолютная скорость точки
– это абсолютная скорость точки ![]() . Аналогично понятие переносного ускорения (в приведенном определении слово «скорость» надо заменить на «ускорение»).
. Аналогично понятие переносного ускорения (в приведенном определении слово «скорость» надо заменить на «ускорение»).
К сведению: идея относительности движения была чужда и астрономии, и физике древних. Первым развил её Николай Коперник (1473-1543).
Рекомендуем к использованию две системы обозначений – полную (основную) и упрощённую (применяемую в простых случаях).
Полная система обозначений
При буквах, отображающих кинематические величины (![]() ), пишут двухсимвольные индексы -
), пишут двухсимвольные индексы - ![]() ,
, ![]() и т.д. Первый символ - в виде буквы или буквы с цифровым индексом (М, М2 , А, В и т.п.) - отображает точку, о скорости (или ускорении) которой ведётся речь; цифровой индекс при букве (М2 и т.п.) удобно применять при необходимости различать между собою совпадающие точки, но принадлежащие различным телам (цифра – это номер тела). Второй символ (1, 2, 3, Р, С и т.д.) является именем системы отсчёта, относительно которой рассматривается движение (это номер тела, с которым связана система отсчёта). Если вторым символом является буква, то это означает, что система отсчёта перемещается поступательно (относительно неподвижной), а разновидность буквы (Р, С, А4 и т.д.) является именем точки, с которой во времени совпадает начало этой поступательно перемещающейся системы отсчёта.
и т.д. Первый символ - в виде буквы или буквы с цифровым индексом (М, М2 , А, В и т.п.) - отображает точку, о скорости (или ускорении) которой ведётся речь; цифровой индекс при букве (М2 и т.п.) удобно применять при необходимости различать между собою совпадающие точки, но принадлежащие различным телам (цифра – это номер тела). Второй символ (1, 2, 3, Р, С и т.д.) является именем системы отсчёта, относительно которой рассматривается движение (это номер тела, с которым связана система отсчёта). Если вторым символом является буква, то это означает, что система отсчёта перемещается поступательно (относительно неподвижной), а разновидность буквы (Р, С, А4 и т.д.) является именем точки, с которой во времени совпадает начало этой поступательно перемещающейся системы отсчёта.
















