ztm9 (850183)
Текст из файла
22. Метод матричной кинематики
22.1. Введение в раздел
Метод матричной кинематики позволяет от разбросанности в записях и поясняющих длиннот элементарной и векторной алгебр перейти к упорядоченности и компактности, к быстрому ориентированию в преобразованиях, делает удобным использование компьютерной техники, что существенно облегчает исследовательский труд.
Особенно удобно использовать матричный метод в случаях, когда в процессе исследований приходится несколько раз переходить от одних систем отсчёта к другим.
Две основные инженерные задачи, при решении которых удобно использовать матричный метод:
1. Исследование движений схватов механических рук, манипуляторов и роботов; понятие «схват» см. на рис.22.1;
2. Отыскание взаимоогибающих линий и поверхностей - профилирование кулачков, зубьев зубчатых колёс и т.п., что особенно важно для специальностей «станки и режущий инструмент»; но по причине объёмности и специфичности вопроса здесь ограничиваемся лишь сообщением информации о наличии в инженерной литературе хорошо развитого способа проектирования сопряжённых профилей, основанного на использовании метода матричной кинематики.
Дополнительные сведения по рассматриваемому вопросу можно найти в «Игнатищев Р.М. Начала матричной кинематики. Могилёв: ротапринт ММИ, 1991.- 33 с.» - «Использование матричного метода для профилирования кулачка»; «Построение поворотной матрицы при ориентировании одной системы отсчёта относительно второй с помощью углов Эйлера»; «120 вариантов индивидуальных заданий по определению положений, скоростей и ускорений схватов в пятизвенных разомкнутых цепях, составленных из вращательных и поступательных пар».
Глубокое ознакомление с робототехникой можно начинать с книги: «Борисенко Л.А., Самойленко А.В. Механика промышленных роботов и манипуляторов с электроприводом.- Мн.: Выш. школа, 1992.- 234 с.».
22.2. Постановка задачи о многоступенчатом преобразовании координат
В опасных или неудобных для человека зонах выполнения производственных операций часто используют механические руки, манипуляторы и роботы. Диктуется это необходимостью добраться рабочим инструментом до требуемой точки некоторой части пространства, причём с обеспечением любой ориентации (с обеспечением возможности добраться до обрабатываемого объекта снизу, сверху, слева, справа, спереди, сзади). Это и обуславливает необходимость использования многозвенных механизмов, подобных изображённому на рис.1, где
161
1
Разомкнутый механизм с последова-тельным соединением вращательными и поступательными парами 7-ми звеньев
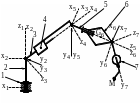 – неподвижное звено; 2, 3, 4, 5, 6 и 7 – подвижные. С каждым из них связана своя система отсчёта -
– неподвижное звено; 2, 3, 4, 5, 6 и 7 – подвижные. С каждым из них связана своя система отсчёта - П
Рисунок 22.1
рименительно к механизму по рис.1 цепочка связей между системами отсчёта имеет вид:![]() .
.
В общем случае цепочку связей между системами отсчёта можно записать:
![]()

22.1
, где![]() - точка, координаты которой известны относительно схвата
- точка, координаты которой известны относительно схвата ![]() .
.
Считаем известными также положения систем отсчёта ![]() относительно
относительно ![]() ,
, ![]() относительно
относительно ![]() , ... ,
, ... , ![]() относительно
относительно ![]() и т.д., 3-й относительно 2-й, 2-й относительно 1-й.
и т.д., 3-й относительно 2-й, 2-й относительно 1-й.
Требуется установить положение точки ![]() относительно неподвижной системы отсчёта.
относительно неподвижной системы отсчёта.
22.3. Спарка систем отсчёта и матрица
п реобразования в ней координат
реобразования в ней координат
К подразделу 22.3
Спарка систем отсчёта - это любая их пара, связанная между собою процедурой преобразования координат (иначе: это любая соседствующая пара систем отсчёта из цепочки 22.1).
П
Рисунок 22.2
усть162
![]() (орты
(орты ![]() ) - координатопринимающей системами отсчёта.
) - координатопринимающей системами отсчёта.
И пусть: ![]() просто
просто ![]() - радиус-вектор произвольной точки
- радиус-вектор произвольной точки ![]() в системе
в системе ![]() ;
; ![]() - радиус-вектор, определяющий положение начала системы
- радиус-вектор, определяющий положение начала системы ![]() относительно
относительно ![]() ;
;
![]() просто
просто ![]() - радиус-вектор, определяющий положение точки
- радиус-вектор, определяющий положение точки ![]() относительно системы
относительно системы ![]() .
.
Т.к. ![]() , то поочерёдно перемножая
, то поочерёдно перемножая ![]() на орты
на орты ![]() , получаем:
, получаем:
![]()

а
;![]() ;
;
![]() .
.
![]() сокращённо
сокращённо ![]() ;
;
![]() сокращённо
сокращённо ![]() ; .......
; .......
![]() сокращённо
сокращённо ![]() ; .........
; .........
![]()

 сокращённо
сокращённо![]() .
.
2.22
называют поворотной матрицей, где 1, 2, 3 – имена осей соответственно ![]() .
.
Замечание: ранее использовавшееся правило в двухсимвольном индексе на второе место ставить имя системы отсчёта, относительно которой определяется положение перемещающегося объекта (![]() и т.д.) перенесено и в обозначения направляющих косинусов.
и т.д.) перенесено и в обозначения направляющих косинусов.
Поворотную матрицу считаем известной. Однако это не означает, что все её ![]() компонентов независимы друг от друга. Независимыми из них являются лишь 3. Остальные могут вычисляться по уравнениям, получающимся из легко запоминаемых условий:
компонентов независимы друг от друга. Независимыми из них являются лишь 3. Остальные могут вычисляться по уравнениям, получающимся из легко запоминаемых условий:
![]()
(надо только ![]() выразить через
выразить через ![]() ).
).
163
И меющийся в (а) столбец
меющийся в (а) столбец ![]() назовём - «вектор-столбец, определяющий положение начала координатопередающей системы отсчёта относительно координатопринимающей».
назовём - «вектор-столбец, определяющий положение начала координатопередающей системы отсчёта относительно координатопринимающей».
П рямоугольную матрицу
рямоугольную матрицу ![]()
называют матрицей положения
координатопередающей системы отсчёта относительно координатопринимающей.
Чтобы приспособить прямоугольную матрицу положения ![]() под операцию произведения её дополняют снизу строкой
под операцию произведения её дополняют снизу строкой ![]() . В результате получается
. В результате получается


-
22.3
матрица преобразования координат в спарке систем отсчёта. 
Четырёхкомпонентные столбцы ![]() будем называть - «адаптированные вектор-столбцы коор-динат точек» (соответственно
будем называть - «адаптированные вектор-столбцы коор-динат точек» (соответственно ![]() и
и ![]() ).
).
Адаптированные = приспособленные под процедуру произведения матриц.
Чтобы структурно-терминологическое описание матрицы преобразования было полным, строку ![]() называем - «нулевая вектор-строка».
называем - «нулевая вектор-строка».
22.4. Матричная формула преобразования координат в спарке систем отсчёта
Из (а) и понятия произведения матриц видно:
![]()
22.4
-адаптированный вектор-столбец координат точки в принимающей системе отсчёта равен произведению матрицы преобразования координат в спарке на адаптированный вектор-столбец координат этой же точки в передающей системе отсчёта.
164
Формула 22.4 простейшая. Необходимо только владеть процедурой перемножения матриц.
Для облегчения запоминания и хранения в памяти операций, применяемых при перемножении матриц, рекомендуем математическое определение дополнять кинематическим образом – правая матрица поворачивается на 90о против хода стрелки часов, устанавливается над левой матрицей и затем одношаговыми перемещениями протягивается по неподвижной левой матрице. Особенно этот кинематический образ удобен при рассмотрении произведения матрицы на вектор-столбец:
при первом шаге повёрнутый столбец накроет 1-ю строку матрицы; перекрывшие друг друга элементы попарно перемножаются; сумма произведений и является верхним элементом искомого вектор-столбца;
при втором шаге повёрнутый столбец накроет 2-ю строку матрицы; перекрывшие друг друга элементы попарно перемножаются; сумма произведений даст второй (сверху) элемент искомого вектор-столбца; и т.д.
Итак, если воспользоваться правилами произведения матриц, то из формулы 22.4 получается результат (а), но новый подход укорачивает записи, даёт упорядоченность при их разворачивании и существенно снижает вероятность появления в процессе преобразований ошибок.
22.5. Матричная формула преобразования координат для цепочки связанных систем отсчёта
Без дополнительных рассуждений ясно, что


22.5
.Применительно к устройству по рис.1 формула 4 принимает вид:
 .
.
22.6. Пример многоступенчатого преобразования координат
Принимаем к рассмотрению пример по рис.22.1 и записываем матрицы преобразования для всех спарок систем отсчёта. При этом, используем сокращённые обозначения:
![]() ; ......
; ......
и т.д. - ![]() .
.
165


![]()




![]()



![]()


166
Пусть координатами точки М относительно схвата являются ![]() ,
, ![]() ,
, ![]() . Тогда:
. Тогда:
 ,
,
 ,
,
 ;
;
Аналогично:

Последняя операция перемножения матрицы преобразования координат на адаптированный вектор-столбец приводит к результату:
![]() ;
; ![]() ;
;
![]() ,
,
где
![]() ;
;
![]() ;
;
![]() .
.
После определения координат точки относительно неподвижной системы отсчёта несложно (см. подраздел 17.5), используя численный метод, определить абсолютные скорость и ускорение.
167
22.7. Заключение по разделу
Мала вероятность, что в ближайшие 20-30 лет инженерам придётся создавать механические руки, манипуляторы и роботы с большим чем 7 числом последовательно соединённых звеньев, ибо экономический фактор обязывает всегда стремиться иметь как можно более простые конструкции. Поэтому, на основании рассмотренного в подразделе 6, можно заключить: метод матричной кинематики даже вручную позволяет за несколько часов аналитически описать движение любой точки робототехнического механизма; причём, время получения итоговых математических выражений можно существенно сократить – если составлять их с использованием компьютерной техники (с применением редактора формул).
Это значит, что при создании на сегодняшний день недостаточно развитой техники механических рук и манипуляторов у разработчика не возникнет непреодолимых механических задач, т.е. нами показано одно из тех направлений возможной деятельности молодых инженеров-машиностроителей, в котором они смогут, проявляя инициативу, заявить о себе как о сформировавшемся и умеющем делать конкретные дела специалисте.
168
Характеристики
Тип файла документ
Документы такого типа открываются такими программами, как Microsoft Office Word на компьютерах Windows, Apple Pages на компьютерах Mac, Open Office - бесплатная альтернатива на различных платформах, в том числе Linux. Наиболее простым и современным решением будут Google документы, так как открываются онлайн без скачивания прямо в браузере на любой платформе. Существуют российские качественные аналоги, например от Яндекса.
Будьте внимательны на мобильных устройствах, так как там используются упрощённый функционал даже в официальном приложении от Microsoft, поэтому для просмотра скачивайте PDF-версию. А если нужно редактировать файл, то используйте оригинальный файл.
Файлы такого типа обычно разбиты на страницы, а текст может быть форматированным (жирный, курсив, выбор шрифта, таблицы и т.п.), а также в него можно добавлять изображения. Формат идеально подходит для рефератов, докладов и РПЗ курсовых проектов, которые необходимо распечатать. Кстати перед печатью также сохраняйте файл в PDF, так как принтер может начудить со шрифтами.















