ztm16 (850190)
Текст из файла
П
ба
олученное выражение объединяем с последним равенством из строки (а) и получаем:
![]() .
.
С другой стороны ![]() . Таким образом:
. Таким образом:

в
![]() .
.
Учитываем, что ![]() , а
, а ![]() , где
, где ![]() - алгебраическая величина - если
- алгебраическая величина - если ![]() расположена выше точки
расположена выше точки ![]() (см. рис.18), то
(см. рис.18), то ![]() больше нуля, если ниже – меньше нуля). Тогда (в) принимает вид:
больше нуля, если ниже – меньше нуля). Тогда (в) принимает вид:
![]() .
.
Итак,

29.21
геометрическая ось гироскопа описывает коническую поверхность вокруг вертикали с угловой скоростью ![]() ,
,
из которой видно:

29.22
чем меньшим будет непопаданиеПРИМЕР 29.8.- Вычисление угловой скорости прецессии гироскопа
Дано. – Момент инерции гироскопа ![]() кг..см2, масса
кг..см2, масса ![]() кг, непопадание центра масс в центр сферического движения
кг, непопадание центра масс в центр сферического движения ![]() мкм. Модуль угловой скорости собственного вращения гироскопа
мкм. Модуль угловой скорости собственного вращения гироскопа ![]() об/мин.
об/мин.
Требуется. - Вычислить модуль угловой скорости прецессии гироскопа. Решение.-  угловых градуса за сутки.
угловых градуса за сутки.
265
29.15*. О гироскопе с двумя степенями свободы, гироскопическом моменте и гироскопических реакциях
П
Рисунок 29.20
Принципиальная схема гироскопа
с двумя степенями свободы
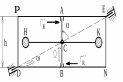 ринципиальная схема гироскопа с двумя степенями свободы изображена на рис.29.20:
ринципиальная схема гироскопа с двумя степенями свободы изображена на рис.29.20: Приведенная принципиальная схема гироскопа с двумя степенями свободы является моделью реальных устройств. Например, ротор электродвигателя троллейбуса – это гироскоп, а поворачивающийся на поворотах его корпус – рама гироскопа. Колёсная пара и рама автомобиля – это также гироскоп с двумя степенями свободы. И т.д.
Замечено: если угловая скорость рамы не равна нулю ( ![]() ), то гироскоп оказывает сопротивление повороту его оси относительно инерциальной системы отсчёта. И явление это, вновь-таки, не есть что-то необъяснимое – оно также надёжно предсказывается методами теоретической механики. Для показа этого обратимся к рассмотренной в предыдущем разделе формуле (б):
), то гироскоп оказывает сопротивление повороту его оси относительно инерциальной системы отсчёта. И явление это, вновь-таки, не есть что-то необъяснимое – оно также надёжно предсказывается методами теоретической механики. Для показа этого обратимся к рассмотренной в предыдущем разделе формуле (б):
![]() .
.
Здесь ![]() (начало центромассовой системы координат) написано вместо
(начало центромассовой системы координат) написано вместо ![]() на основании изложенного в подразделе 29.11.
на основании изложенного в подразделе 29.11.
Т.к. ![]() , то ясно, что
, то ясно, что

29.23
величина Гироскопический момент является инженерно ощутимой величиной. Например, при ![]() ,
, ![]() кг..м2,
кг..м2, ![]() и
и ![]() он равен
он равен ![]() кН.м (
кН.м (![]() Н.м).
Н.м).
266
Направлен гироскопический момент перпендикулярно и ![]() , и
, и ![]() ; следовательно направлен перпендикулярно плоскости рамы (что следует из правил векторного произведения).
; следовательно направлен перпендикулярно плоскости рамы (что следует из правил векторного произведения).
В условиях схемы, изображённой на рис.29.20, гироскопический момент уравновешивается парой сил ![]() , приложенных к оси гироскопа со стороны рамы (со стороны подшипников
, приложенных к оси гироскопа со стороны рамы (со стороны подшипников ![]() и
и ![]() ). Эти силы называют «гироскопическими реакциями».
). Эти силы называют «гироскопическими реакциями».
Из рассмотренных равенств видно, что

29.23
гироскопические реакции – это силы, приложенные к оси гироскопа со стороны рамы, расположены в её плоскости и направлены так, что если мысленно приложить их к вектору большой угловой скорости, то он завращается в том направлении, чтобы из двух возможных вариантов (векторы сонаправлены - векторы противоположно направлены) раньше появилась сонаправленность большой и малой угловых скоростей. Модуль каждой из гироскопических реакций определяется формулой: ![]() , где
, где
![]() - угол между векторами
- угол между векторами ![]() и
и ![]() ;
;
![]() - расстояние между подшипниками гироскопа.
- расстояние между подшипниками гироскопа.
Р
30.1а
ассмотренное явление используют не только для определения гироскопических реакций (с целью их учёта в прочностных и других инженерных расчётах), но, в сочетании с приборами-указателями направлений, используют для решения задач по стабилизации движений. В частности, гироскопические силы используют для обеспечения также точности в направленности орудия движущегося танка на цель; для предотвращения морской качки; для обеспечения вертикального положения двухколёсных автомобилей и вагонов на однорельсовых дорогах; и т.д.
30.2
267
30. Закон об изменении кинетической энергии
Для формулировки закона, а затем его использования, необходимо ввести ряд новых понятий. Им отводятся подразделы 30.1-6.
3
К понятиям о работе и мощности силы
0.1. Понятия о работе и мощности. Общие формулы для их вычисления В качестве мер механических действия, кроме силы, её момента и импульса, пользуются также понятиями «работа» и «мощность» силы.
качестве мер механических действия, кроме силы, её момента и импульса, пользуются также понятиями «работа» и «мощность» силы.
Пусть (см. рис.30.1) ![]() - траектория материаль-ной точки
- траектория материаль-ной точки ![]() ,
, ![]() - действующая на неё сила (в общем случае переменная – и по модулю, и по направлению). И пусть промежуток времени, за который материальная точка переместилась из положения «1» в положение «2», является беско-нечно малой величиной, т.е. пусть
- действующая на неё сила (в общем случае переменная – и по модулю, и по направлению). И пусть промежуток времени, за который материальная точка переместилась из положения «1» в положение «2», является беско-нечно малой величиной, т.е. пусть ![]() .
.
Т
Рисунок 30.1
огда вектор перемещения точкиПо определению,

30.1
величину Если движение задано естественным способом, то, как уже рассматривалось в кинематике, ![]() с точностью до бесконечно малых второго порядка малости и, поэтому,
с точностью до бесконечно малых второго порядка малости и, поэтому, ![]() , где
, где ![]() - орт подвижной касательной оси. Тогда:
- орт подвижной касательной оси. Тогда:
![]() ,
,
где ![]() - проекция силы на подвижную касательную ось.
- проекция силы на подвижную касательную ось.
Если же движение задано координатным способом, то
![]()
и, учитывая правила скалярного произведения (произведения ортогональных векторов равны нулям), получаем
30.1б
![]()
 .
.
В еличину  называют работой силы на конечном перемещении точки её приложения (из положения «1» в «2»).
называют работой силы на конечном перемещении точки её приложения (из положения «1» в «2»).
268
Е
30.6а
сли точка приложения силы ![]()
30.6б
, т.е.: м
30.3
гновенная мощность силыНаряду с понятием «мгновенная мощность силы» широко оперируют понятием «средняя мощность силы». Что это за понятие?
Пусть ![]() - это работа силы за промежуток времени
- это работа силы за промежуток времени ![]() . Тогда:
. Тогда:
в
30.4
еличину, определяемую из выражения называют средней мощностью силы ![]() .
.
У
К понятию
«средняя мощность силы»
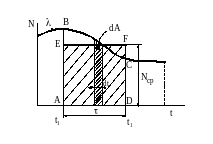 добно среднюю мощность силы представлять геометрически. С этой целью приводим рис.30.2, где: линия
добно среднюю мощность силы представлять геометрически. С этой целью приводим рис.30.2, где: линия Д
Рисунок 30.2
о сих пор речь велась об отдельной силе. Но понятия «работа» и «мощность» распространяется и на системы сил.П
30.7
усть на некоторую принятую к рассмотрению механическую систему дей-ствует ![]()
30.5
- элементарная работа системы сил, действующей на принятую к рассмотрению механическую систему;269
![]() - мгновенная мощность, развиваемая системой сил, действующих на принятую к рассмотрению механическую систему.
- мгновенная мощность, развиваемая системой сил, действующих на принятую к рассмотрению механическую систему.
![]() - средняя мощность, развиваемая системой сил, действующих на принятую к рассмотрению механическую систему.
- средняя мощность, развиваемая системой сил, действующих на принятую к рассмотрению механическую систему.
Из введенных понятий с очевидностью следует, что суммарная элементарная работа и суммарная мощность связаны между собою той же зависимостью 30.3, которой связаны элементарная работа и мощность отдельно взятой силы.
3
К выводу формулы для вычисления работы силы тяжести
0.2. Примеры вычисления работ сил для часто встречающихся случаев30.2.1. Работа силы тяжести на
к онечном перемещении точки её приложения
онечном перемещении точки её приложения
П
8
усть материальная точка ![]()
![]() .
.

Рисунок 30.3
9
. Принято называть: ![]() - геодезическая высота начального положения точки;
- геодезическая высота начального положения точки; ![]() - геодезическая высота конечного положения точки;
- геодезическая высота конечного положения точки; ![]() - разность геодезических высот. Таким образом:
- разность геодезических высот. Таким образом:
![]() - работа, совершаемая силой тяжести, не зависит от формы траектории точки её приложения и равна произведению модуля силы тяжести на разность геодезических высот начального и конечного положений этой точки.
- работа, совершаемая силой тяжести, не зависит от формы траектории точки её приложения и равна произведению модуля силы тяжести на разность геодезических высот начального и конечного положений этой точки.
30.2.2. Работа упругой силы на конечном перемещении точки её приложения
На рис.30.4: ![]() - тело, к которому приложена упругая сила
- тело, к которому приложена упругая сила ![]() ;
; ![]() - положение тела, соответствующее недеформированному состоянию пружины;
- положение тела, соответствующее недеформированному состоянию пружины;
270
![]() - координ
- координ
К выводу формулы для вычис-ления работы упругой силы
ата, определяющая некоторое текущее положение телаВ
30.10
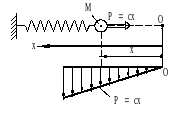 соответствии с законом Гука
соответствии с законом Гука Работу упругой силы при перемещении тела из некоторого деформированного состояния, определяемого координатой ![]() , в недеформи-рованное (
, в недеформи-рованное (![]() ), называют полной работой упругой силы.
), называют полной работой упругой силы.
Характеристики
Тип файла документ
Документы такого типа открываются такими программами, как Microsoft Office Word на компьютерах Windows, Apple Pages на компьютерах Mac, Open Office - бесплатная альтернатива на различных платформах, в том числе Linux. Наиболее простым и современным решением будут Google документы, так как открываются онлайн без скачивания прямо в браузере на любой платформе. Существуют российские качественные аналоги, например от Яндекса.
Будьте внимательны на мобильных устройствах, так как там используются упрощённый функционал даже в официальном приложении от Microsoft, поэтому для просмотра скачивайте PDF-версию. А если нужно редактировать файл, то используйте оригинальный файл.
Файлы такого типа обычно разбиты на страницы, а текст может быть форматированным (жирный, курсив, выбор шрифта, таблицы и т.п.), а также в него можно добавлять изображения. Формат идеально подходит для рефератов, докладов и РПЗ курсовых проектов, которые необходимо распечатать. Кстати перед печатью также сохраняйте файл в PDF, так как принтер может начудить со шрифтами.















