


Автоматизация процесса водоотлива
8. Автоматизация процесса водоотлива
8.1. Водоотливная установка как объект автоматизации
Водоотливные установки горных предприятий, отрабатывающих обводненные месторождения, представляют сложный энергомеханический комплекс, включающий: насосные агрегаты различной производительности, трубные коллекторы, систему электроснабжения и аппаратуру автоматизации.
Основная задача автоматизации этих объектов заключается в высвобождении обслуживающего персонала и обеспечении надежного и экономичного функционирования процесса водоотлива, чтобы исключить затопление горных выработок и создать нормальные условия для ведения горных работ.
Для обеспечения заданного уровня безотказной работы водоотлива его проектируют с запасом по емкости водосборника и резервом насосных агрегатов. Кроме того, на главных водоотливных установках предусматривается резервирование электроснабжения и дублирование трубопровода для откачки воды на поверхность.
Водоотливные установки работают, как правило, в цикличном режиме. Их включение и отключение производят в функции уровня воды в водосборнике.
Аппаратура автоматизации водоотлива должна обеспечивать:
автоматическую контролируемую заливку насосов перед их пуском в работу;
автоматическое включение в работу очередного насоса при достижении водой верхнего уровня и непрерывную работу его до нижнего уровня;
Рекомендуемые материалы
автоматический контроль за работающим насосом и аварийное отключение его, если он не развил заданной производительности или в установке возник отказ (перегрев подшипников, короткое замыкание и др.);
автоматическое включение в работу резервного насоса, если отказал первый насос или он не справляется с притоком и вода достигла повышенного или аварийного уровня. Может предусматриваться одновременное включение нескольких насосов;
обезличенную звуковую и световую сигнализацию на пульт диспетчера о состоянии установки (работа, отказ) и аварийном уровне воды, а также сигнализацию в камере об отказавшем насосе;
возможность дистанционного включения установки с пульта диспетчера и перевод ее на ручное управление;
возможность применения различных способов заливки (погружной насос, баковый аккумулятор, сифонный способ и др.);
блокирование от включения отказавшего насоса без вмешательства обслуживающего персонала;
автоматическое управление работой задвижек на трубопроводах, а также работу с постоянно открытой задвижкой при небольших глубинах.
Учитывая многообразие типов водоотливов, разнообразие гидрогеологических, горнотехнических условий шахт и рудников, для автоматизации этого процесса используется различная серийная аппаратура, обеспечивающая с той или иной полнотой реализацию рассмотренных требований. В ряде случаев автоматизация водоотлива выполняется по индивидуальным проектам.
8.2. Автоматическое управление водоотливными установками
Для автоматического управления водоотливными установками применяется следующая аппаратура:
АВО-3 для установок, оборудованных одним насосом с короткозамкнутым асинхронным электродвигателем до 120 кВт;
АВН-1М (в настоящее время выпуск аппаратуры прекращён) для установок, оборудованных тремя насосами с низковольтными асинхронными короткозамкнутыми электродвигателями;
УАВ для установок, оборудованных насосами с высоковольтными и низковольтными асинхронными короткозамкнутыми электродвигателями.
Унифицированная аппаратура УАВ имеет нормальное исполнение и может укомплектовываться для автоматизации 16 насосов.
ВАВ для установок, .оборудованных насосами (до девяти) с высоковольтными и низковольтными асинхронными короткозамкнутыми электродвигателями. Аппаратура имеет взрывозащищенное исполнение и может использоваться в шахтах, опасных по газу или пыли.
К важнейшим операциям по управлению водоотливной установкой относится заливка насоса перед включением его в работу. В настоящее время наибольшее распространение получил способ заливки при поморий заливочного погружного насоса ЗПН, который находится в водосборнике ниже нижнего уровня и постоянно залит водой.
Другие способы заливки: подача воды из нагнетательного става, применение баковых аккумуляторов, сифонный способ, использование заглубленных насосных камер получили в угольной промышленности малое распространение. В горнорудной промышленности заглубленные насосные камеры применяют широко, так как они обеспечивают наиболее благоприятные условия работы насосов и существенно упрощают схему автоматизации.
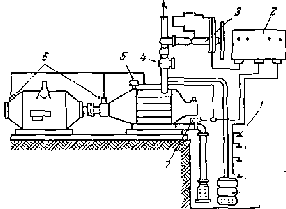 |
Рис. 8.1. Схема автоматической водоотливной установки:
I — электродные датчики уровня; 2 — аппарат управления; 3 — электропривод задвижки ЭПЗ-1; 4 — обратный клапан; 5 — реле давления РДВ; 6 — термодатчик ТДЛ; 7 — реле производительности РПН; 8 — логружной заливочиый насос ЗПН.
Гидравлическая схема автоматической водоотливной установки приведена на рис. 8.1. Обобщенный алгоритм управления такой установкой при постоянно открытой задвижке на нагнетательном трубопроводе и отключенном электроприводе задвижки дан на рис. 8.2. В соответствии с ним функционирование водоотлива осуществляется следующим образом.
После включения в работу аппаратуры (например, УАВ) и ее программного устройства (оператор А) контролируется уровень воды в водосборнике при помощи электродных датчиков (логическое условие р). Когда вода поднимется к датчику верхнего уровня, поступает команда на включение заливочного насоса ЗПН, который подает воду в насос в течение времени, предусмотренного программным блоком. Качество заливки контролируется реле давления РДВ (логическое условие k). Если в момент контроля уровня он достиг повышенного или аварийного уровня (p=0), программный блок сначала переключает схему на включение п насосов одновременно, а лишь затем включает заливочный насос.
Когда насос (или насосы) будет залит, подается команда на ввод его в работу (оператор Аз) с последующим контролем за производительностью при помощи флажкового реле производительности РПН (логическое условие г). Если насос развил заданную производительность (г=1), то схема переключается на контроль нижнего уровня, при достижении которого насос будет отключен. Если насос по какой-либо причине не развил заданной производительности, он отключается и подается сигнал диспетчеру (оператор Л4), а аппаратура начнет новый цикл по включению в работу очередного насоса. Приведенный алгоритм отражает только порядок выполнения основных функций по включению и отключению насосов. Наряду с ними аппаратура автоматизации обеспечивает выполнение различных контрольных и защитных функций, например, контроль температуры подшипников при помощи датчиков ТДЛ (см. рис. 8.1).
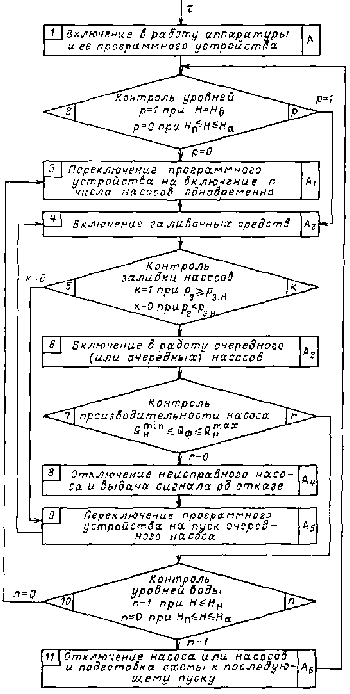 |
Рис 8.2. Алгоритм управления автоматической водоотливной установкой при постоянно открытых задвижках.
8.3. Автоматическое регулирование режима работы водоотливных установок
Дальнейшее повышение эффективности работы водоотливных установок может быть достигнуто при создании систем, обеспечивающих регулирование производительности насосов по заданному алгоритму или перевод их на непрерывную откачку воды (работа на «приток»). При этом:
сокращается необходимая емкость водосборников на 30—50%;
сокращается на 35—75% мощность электродвигателей насосных агрегатов и появляется возможность применять меньшие по производительности насосы;
повышается безотказность работы водоотливной установки, гак как примерно 60% отказов возникают в момент пуска насосов;
уменьшаются затраты на водоотлив за счет интенсивной откачки воды в часы минимума энергопотребления, когда тариф за электроэнергию минимален.
Автоматическое регулирование производительности центробежных насосов может производиться путём изменения окружной скорости рабочего колеса и без её изменения.
Функциональная схема САУ водоотливной установкой при использовании регулируемого привода в целях стабилизации уровня воды в водосборнике показана на рис. 8.3.
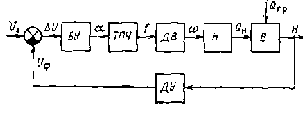 |
Рис. 8.3. Функциональная схема САУ стабилизацией уровня воды в водосборнике.
Объект регулирования в САУ водоотливной установкой — водосборник В, а его выходной параметр — уровень воды Н, который необходимо поддерживать постоянным путем изменения производительности Qн насоса Н. Возмущающее воздействие в этой системе — приток воды Qпр. Дифференциальное уравнение такого объекта:
 ,
,
где dH/dt – скорость изменения уровня воды в водосборнике, м/с;
Qпр – приток воды, м3/с; kВ = 1/F – передаточный коэффициент объекта (F — площадь водосборника, м2); Qн — производительность насоса, м3/с.
Следовательно, объект представляет собой астатическое звено первого порядка, передаточная функция которого:
Обратите внимание на лекцию "3.1 Воздействие электрического тока на организм человека".
 .
.
Насос характеризуется угловой скоростью рабочего колеса w на входе и производительностью Qн на выходе. Он может быть представлен апериодическим звеном первого порядка с передаточной функцией:
 .
.
Угловая скорость рабочего колеса насоса меняется путем изменения частоты f напряжения, питающего электродвигатель насоса. Регулирование этой частоты в САУ осуществляется тиристорным преобразователем частоты ТПЧ, сигнал управления a на который подаётся от блока управления БУ. Измерение выходного параметра объекта Н производится датчиком уровня ДУ. Знак и уровень сигнала рассогласования DU между фактическим Uф и заданным Uз значениями уровней определяет характер выходного сигнала блока управления БУ. Сигналы Uз и Uф соответственно пропорциональны Нз и Нф. Для получения непрерывного сигнала Uф используются индуктивные и реостатные датчики с поплавковым чувствительным элементом, а также другие типы уровнемеров.
Данный способ регулирования производительности насосов наиболее эффективен по сравнению с другими.
В зависимости от постановки задачи при автоматическом регулировании производительности насосных агрегатов могут быть реализованы различные алгоритмы управления: поддержание постоянного уровня воды в водосборнике; изменение уровня воды по заданной программе; выравнивание нагрузки на шинах шахтной подстанции.



















