


Постановка задачи коши и смешанной (начально-краевой). Задачи для системы линейных и квазилинейных УЧП
Постановка задачи коши и смешанной (начально-краевой). Задачи для системы линейных и квазилинейных УЧП
 - лин. Ур. УЧП гиперболического типа.
- лин. Ур. УЧП гиперболического типа.
ß
 только вдоль этих линий
только вдоль этих линий 
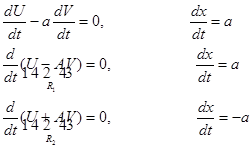
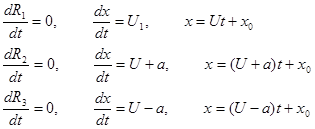
 Проинтегрируем. Получим семейство интегральных кривых:
Проинтегрируем. Получим семейство интегральных кривых:
x = at + x0
x – at = x0 Вдоль каждой прямой
сохраняется значение x0.
Þ U =const вдоль каждой линии.
Рекомендуемые материалы
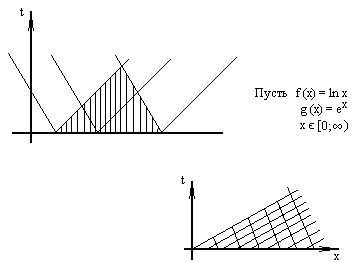
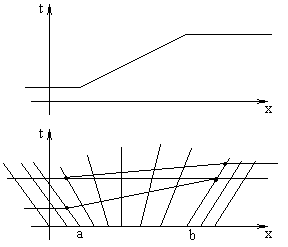
Будем считать, что при t = 0 U (x,0) = U0(x).
U (x,t) = U0 (x - at) =ex – at – волновое движение.
Над плоскостью x – t поверхность U(x,t) при t = 0 проходит через U0(x). C течением времени эта волна движется не меняя профиля. Задача Коши – это задача с заданными Н.У.
Предположим, что Н.У. заданы во время t = t*; или даже на линии x = X(t), t = T(x)
U (X, T(x)) = U0(x).
Линия, на которой заданы Н.У., не должна совпадать с характеристикой, так как вдоль нее U = const, а у нас U ¹ const.
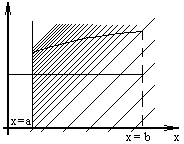 |
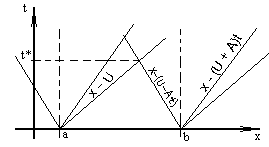
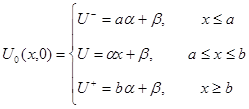
Пусть задано U0(x) при t = 0 и отрезок xÎ[a;b] конечен.
Можно задать Г.У.: при x =a , U0(t,a)= U0(t), a £ x £ b
0 £ t £ t*
Т.е. получаем начально – краевую задачу.
Задание Г.у. должно происходить в точном соответствии с положением (направлением) характеристик.
Если хотим получить значения U при t<0, то при нашем направлении характеристик условия должны задаваться на x = b.
Система трёх уравнений газовой динамики.
Плоское одномерное течение гза с малыми возмущениями, распределенными на стационарном фоне V = const, p = const, R = const.



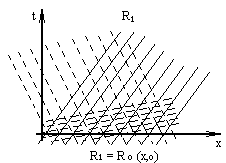 |
R1(x - Ut)
R2 = R20(x,0)
R2 (x – (U+A)t)
Для дозвукового течения U – A <0
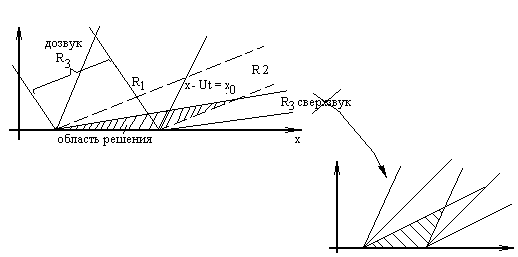 |
R3 = R30 (x,0), R3 (x – (U –A )t)
 |
Прямой канал, газ течет, наложены начальные возмущения.
Дозвук. Течение.
R10(t,a)
R20(t,a)
R30(t,b)
Для сверхзвукового течения U – A > 0, тогда все Г.У. задаются со стороны а.
R10(t,a)
R20(t,a)
R30(t,а)
Сведем его к системе двух уравнений из первых производных.
Определим характеристики скорости |В - СА| = 0.
 Þ
Þ 

 , с2 – а2 = 0, с2 = а2
, с2 – а2 = 0, с2 = а2
с1 = а
с2 = –а – две характеристики скорости.
С1: l11(–a ) – l21 (a2) = 0 l1(-a, -1)
Возьмем l21 = 1, тогда l11 = – a
С2: l12×1 – l21×a2 = 0. l2(a, 1)


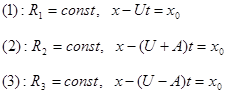
В качестве инварианта Римана:
Þ  R1 = U – aV; R2 = U + aV; Þ
R1 = U – aV; R2 = U + aV; Þ 
x =at + x0
x = – at + x0
Задаем
 |
 -есть решение.
-есть решение.
Уравнения газовой динамики в характеристиках:

Предположим, что S = const, тогда  .
.
 Þ
Þ 
Þ второе уравнение: 
 Þ
Þ 
Þ 
 Þ
Þ 
Получить уравнения для совершенного политропного газа (найти в инвариантах Римана)
 ,
,  Þ
Þ 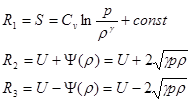
======================================================================================
Д/З: Для трех линейных уравнений газовой динамики (для R1, R2, R3) плоского течения задать на отрезке xÎ[0;1]для дозвукового течения значения трех инвариантов при t =0 (произвольно). Задать г.у. при x = 0 (тоже произвольно) для R1, R2, а для R3 произвольно задаем значения на правой границе при x = 0.
Рисуем области: где какие значения являются определяющими. Выписать решения для  ,
,  ,
, .
.
-------------------------------
РЕШЕНИЕ:
Н.У.: t = 0, R1(x,0) = x, R2(x,0) = sin x, R3(x,0) = cos x.
Г.У.: x = 0, R1(0,t) = ex, R2(0,t) = 0, R3(1,t) = x3.
 |
----------------------------------------------------------------------------------------------------------------------
08.10.02.
1. Получение замкнутой системы уравнений однородных т.д. течений. Интегральная, дивергентная форма Коши-Ковалевского.
2. Получение характеристической формы уравнений гиперболического типа.
3. Получим уравнение в инвариантах Римана для линейных и полулинейных систем гиперболического типа и
для двух дифференциальных уравнений т.д.(S = const).
4. Постановка начально- краевой задачи для дифференциального уравнения газовой динамики для систем
квазилинейных уравнений гиперболического типа.

|B – CE| = 0® ищем С1…Сn – характеристики скорости системы.
Находим левый собственный вектор:
l (B – CE) = 0 Þ lB = CE, e × B = C
 , где
, где 
По одинаковым индексам предполагается суммирование.
 . По i предполагается суммирование. x - разное в каждом уравнении.
. По i предполагается суммирование. x - разное в каждом уравнении.
 вдоль
вдоль 
 ,
, 
¯
Если не зависит от U, то система линейная или полулинейная, т.е. B = B(bij(x,t)).
А раз система линейная или полулинейная, то мы можем ввести инварианты Римана.
 :
:
 ,
, 

Þ  вдоль
вдоль 
g k = gk (x,t,U), поэтому эта система может быть и нелинейной относительно R.



Особенности решения нелинейных систем уравнений:

Н.У.: U (x,t)|t = 0 = 0
 |
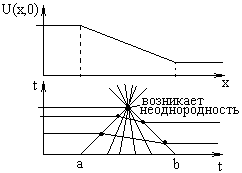 |
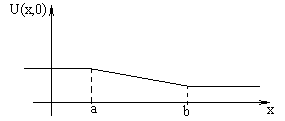
Другие Н.У.: Значения a и b таковы, что
Пересечение характеристик одного семейства означает разрыв времени.

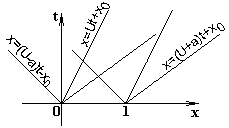
1) a>0Þ¦
а) U = aa + b, x £ a
x = (aa +b)t +x0 , x0 £ a
x = (ax + b)t + x0 , x0 £a.
б) U = ab + b
x = (ab + b)t + x0, x ³ b
в) U = ax0 + b, a £ x £ b
Люди также интересуются этой лекцией: 1 Предмет культурологии.
x = (ax0 + b)t + x0
U (x,0) = U0 (x0,0) Þ 
x £ a Þ U0 (x – (aa + b)t)
x ³ b Þ U0 (x – (ab + b)t)
b £ x £ a Þ
-----------------------------------------------------------------------------------------------------------------------------------------------
















