
Магнитные модуляторы и бесконтактные реле
Глава 26
МАГНИТНЫЕ МОДУЛЯТОРЫ И БЕСКОНТАКТНЫЕ МАГНИТНЫЕ РЕЛЕ
§ 26.1. Назначение магнитных модуляторов
Магнитные модуляторы предназначены для преобразования постоянного напряжения (или тока) в пропорциональное ему переменное напряжение (или ток). Необходимость в таком преобразовании возникает при измерении малых сигналов постоянного тока или напряжения, которые не могут быть непосредственно поданы на измерительные или исполнительные устройства без предварительного усиления. В то же время непосредственное усиление сигналов постоянного тока электронными и полупроводниковыми усилителями имеет серьезный недостаток — нестаиш» сигнала, так называемый дрейф нуля. В случае преобразования сигнала постоянного тока в переменный можно заменить низкостабильный усилитель постоянного тока высокостабильным усилителем переменного тока.
Для такого преобразования можно использовать и электромеханическое устройство — вибропреобразователь, рассмотренный в гл. 18. Однако наличие у вибропреобразователя периодически размыкающихся и замыкающихся контактов является причиной его сравнительно невысокой надежности. Так как магнитный модулятор не имеет контактов, т. е. является бесконтактным элементом автоматики, то и надежность его выше, чем у вибропреобразователя.
По принципу действия и устройству магнитный модулятор ничем не отличается от магнитного усилителя. Надо отметить, что бесконтактное преобразование постоянного тока в переменный выполняют и модуляторы других типов, например полупроводниковые (в том числе транзисторные).
По сравнению с полупроводниковыми отдельные типы магнитных модуляторов имеют лучшую стабильность нуля (особенно при изменении температуры окружающей среды). Так же как и полупроводниковые, магнитные модуляторы могут выполнять преобразование постоянного напряжения в переменное с одновременным усилением. Магнитные модуляторы простыми способами обеспечивают суммирование большого числа сигналов без необходимости введения гальванической связи между ними. Гальваническая связь заключается в непосредственном соединении электрических цепей. Она порой бывает крайне нежелательной, поскольку приводит к вредному влиянию одного элемента автоматики на другой. Наиболее серьезный недостаток магнитных модуляторов по сравнению с полупроводниковыми — это большие габариты и вес.
Довольно часто комбинируют магнитный модулятор с полупроводниковым усилителем, т. е. проектируют магнитно-полупроводниковые преобразователи. В этом случае можно получить оптимальное соотношение между такими техническими характеристиками, как точность, чувствительность, коэффициент усиления, вес, габариты, стоимость, надежность.
Магнитные модуляторы, предназначенные для работы на последующий электронный или полупроводниковый каскад усиления, называют магнитными усилителями напряжения. Различают магнитные модуляторы с выходным переменным током основной и удвоенной частоты.
Рекомендуемые материалы
§ 26.2. Магнитные модуляторы с выходным переменным током основной частоты
В качестве магнитного модулятора с выходным переменным током основной частоты (т. е. равной частоте источника питания) можно использовать любую из рассмотренных в гл. 24 схем двухтактных магнитных усилителей: дифференциальную, мостовую или трансформаторную.
Выбор между той или иной схемой делается в зависимости от мощности управляющего сигнала и необходимого коэффициента усиления по напряжению.
Очевидно, что наибольший коэффициент усиления можно получить в трансформаторной схеме за счет выполнения вторичной обмотки с большим числом витков, т. е. как бы с помощью повышающего трансформатора. Однако при этом возникают прежде всего чисто технологические трудности с намоткой большого числа витков на небольшом сердечнике маломощного магнитного усилителя. Л кроме того, останется меньше пространства для размещения обмотки управления. Вообще, доказано, что мощность управления Ру связана с площадью окна для обмотки управления обратно пропорциональной зависимостью. Чем меньше площадь окна
для обмотки управления обратно пропорциональной зависимостью. Чем меньше площадь окна  тем большая потребуется мощность управления для создания необходимой напряженности магнитного поля в сердечнике. Поэтому трансформаторную схему двухтактного магнитного усилителя реально применяют для магнитных модуляторов при
тем большая потребуется мощность управления для создания необходимой напряженности магнитного поля в сердечнике. Поэтому трансформаторную схему двухтактного магнитного усилителя реально применяют для магнитных модуляторов при Вт. При меньших значениях
Вт. При меньших значениях  (до
(до  Вт) используют мостовую и дифференциальную схемы, как более чувствительные.
Вт) используют мостовую и дифференциальную схемы, как более чувствительные.
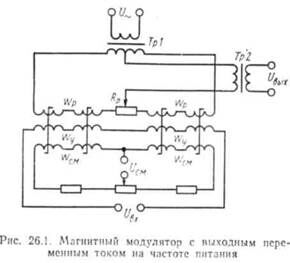
Для получения необходимого коэффициента усиления по напряжению используется отдельный выходной трансформатор как это показано на рис. 26.1. Для балансировки нуля используется резистор
как это показано на рис. 26.1. Для балансировки нуля используется резистор , с движка которого подается напряжение на первичную обмотку
, с движка которого подается напряжение на первичную обмотку Сопротивление
Сопротивление выбирается примерно равным сопротивлению рабочих обмоток
выбирается примерно равным сопротивлению рабочих обмоток
§ 26.3. Магнитные модуляторы с выходным переменным током удвоенной частоты
При рассмотрении процессов, проходящих в идеальном магнитном усилителе, отмечалось, что ток управления можно представить как сумму постоянной и переменной составляющих, причем переменная составляющая изменяется с частотой, вдвое превышающей частоту питания. Если постоянная составляющая обусловлена управляющим сигналом , то переменная составляющая
, то переменная составляющая
возникает вследствие трансформации тока из цепи нагрузки. Трансформируемая из рабочей обмотки ЭДС двойной частоты имеет фа- . зу, которая при перемене полярности управляющего сигнала меняется на 180". При снятии управляющего сигнала ЭДС двойной частоты пропадает. Таким образом, единственной причиной появления ЭДС двойной частоты является подача входного сигнала на усилитель. Заметим, что какие-либо другие причины (нендентнчность сердечников, например) не могут привести к возникновению ЭДС двойной частоты при питании усилителя синусоидальным напряжением.
ЭДС двойной частоты пропадает. Таким образом, единственной причиной появления ЭДС двойной частоты является подача входного сигнала на усилитель. Заметим, что какие-либо другие причины (нендентнчность сердечников, например) не могут привести к возникновению ЭДС двойной частоты при питании усилителя синусоидальным напряжением.
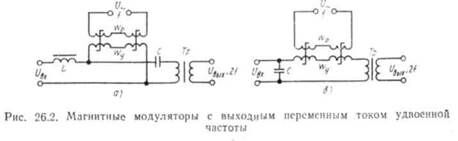
Эффект появления ЭДС двойной частоты и используется в магнитных модуляторах с выходным не переменным током удвоенной частоты (рис. 26.2).
Обмотка управления wv в схемах таких модуляторов используется как для подачи входного сигнала так и для снятия выходного сигнала
так и для снятия выходного сигнала  . ЭДС двойной частоты выделяется с помощью выходного трансформатора
. ЭДС двойной частоты выделяется с помощью выходного трансформатора , Первичная обмотка этого трансформатора может подключаться параллельно обмотке управления
, Первичная обмотка этого трансформатора может подключаться параллельно обмотке управления  (рис. 26.2, а) или последовательно с ней (рис. 26.2,6). В обоих случаях фаза выходного напряжения
(рис. 26.2, а) или последовательно с ней (рис. 26.2,6). В обоих случаях фаза выходного напряжения изменяется на 180° при изменении полярности
изменяется на 180° при изменении полярности т. е. схемы являются реверсивными.
т. е. схемы являются реверсивными.
В схеме с параллельным соединением обмоток (рис. 26.2, а) постоянный ток не поступает в первичную обмотку выходного (обычно повышающего) трансформатора  . Путь постоянной составляющей тока преграждает конденсатор С. Напомним, что емкостное сопротивление
. Путь постоянной составляющей тока преграждает конденсатор С. Напомним, что емкостное сопротивление  , т. е. для постоянной составляющей
, т. е. для постоянной составляющей
 емкостное сопротивление стремится к бесконечности. Дроссель L (индуктивное сопротивление
емкостное сопротивление стремится к бесконечности. Дроссель L (индуктивное сопротивление ) имеет очень малое сопротивление для сигнала постоянного тока, а для тока двойной частоты представляет большое сопротивление. Поэтому дроссель L препятствует прохождению тока двойной частоты через источник входного сигнала (например, датчик). Как правило, стремятся избежать обратного воздействия последующего элемента в системе автоматики на предыдущий (за исключением тех случаев, когда специально создаются обратные связи).
) имеет очень малое сопротивление для сигнала постоянного тока, а для тока двойной частоты представляет большое сопротивление. Поэтому дроссель L препятствует прохождению тока двойной частоты через источник входного сигнала (например, датчик). Как правило, стремятся избежать обратного воздействия последующего элемента в системе автоматики на предыдущий (за исключением тех случаев, когда специально создаются обратные связи).
В схеме с последовательным соединением обмоток (рис. 26.2, б) конденсатор С шунтирует источник входного сигнала, поэтому ток двойной частоты замыкается через этот конденсатор, не попадая в источник входного сигнала. Специальный дроссель для обеспечения режима вынужденного подмагничивания в этой схеме не требуется. Его роль играет первичная обмотка трансформатора
Конденсатор С и дроссель L в схемах магнитного модулятора с выходом на удвоенной частоте играют роль фильтра. Для получения высокой чувствительности и точности преобразования приходится использовать фильтры на выходе и входе. Поэтому модуляторы с выходным током удвоенной частоты оказываются сложнее модуляторов с выходным током основной частоты. Кроме того, они потребляют большую мощность, имеют низкий КПД и небольшой коэффициент усиления. Главное их достоинство — высокая чувствительность: они способны воспринимать управляющие сигналы мощностью всего лишь в Вт (при использовании вы-
Вт (при использовании вы-
сококачественных магнитных материалов).
Более простые схемы имеют магнитные модуляторы с выходным током удвоенной частоты со взаимно перпендикулярными обмотками. На рис. 26.3 приведены конструктувная (а) и электрическая (б) схемы такого модулятора. Кольцевой сердечник модулятора состоит из двух одинаковых половинок (одна из них показана на рис. 26.3, в) с кольцевым пазом. Рабочая обмотка wp изготовлена в виде кольца и уложена в этот паз. Затем обе половинки сердечника соединяются, причем соприкасающиеся поверхности их тщательно шлифуются для уменьшения магнитного сопротивления. Обмотка управления равномерно наматывается по всей длине сердечника.
равномерно наматывается по всей длине сердечника.
 Рабочая обмотка
Рабочая обмотка создает поперечное магнитное поле, замыкающееся в пределах периметра поперечного сечения сердечника. Обмотка управления
создает поперечное магнитное поле, замыкающееся в пределах периметра поперечного сечения сердечника. Обмотка управления создает продольное магнитное поле, замыкающееся по окружности сердечника. Пути потоков
создает продольное магнитное поле, замыкающееся по окружности сердечника. Пути потоков и
и показаны на рис. 26.3, г пунктиром. Так как эти потоки имеют разные пути, то между обмотками
показаны на рис. 26.3, г пунктиром. Так как эти потоки имеют разные пути, то между обмотками и
и отсутствует трансформаторная связь. Следовательно, никакие изменения поперечного потока
отсутствует трансформаторная связь. Следовательно, никакие изменения поперечного потока не. могут наводить ЭДС в обмотке
не. могут наводить ЭДС в обмотке  а ЭДС
а ЭДС
двойной частоты на выходе возникает лишь при появлении входного сигнала
Обмотка  является
является
одновременно и выходной, с нее снимается напряжение
Периодическое изменение индуктивности обмотки управления создается за счет изменения магнитной проницаемости сердечника в продольном направлении магнитным потоком
создается за счет изменения магнитной проницаемости сердечника в продольном направлении магнитным потоком При насыщении сердечника поперечным полем (магнитный поток
При насыщении сердечника поперечным полем (магнитный поток ) эта проницаемость значительно уменьшается. Насыщение сердечника происходит дважды за период питания обмотки
) эта проницаемость значительно уменьшается. Насыщение сердечника происходит дважды за период питания обмотки , Если на
, Если на
обмотку  будет подано постоянное входное напряжение
будет подано постоянное входное напряжение , то ток в этой обмотке будет изменяться соответственно изменению насыщения сердечника, т. е. будет содержать переменную составляющую удвоенной частоты питания
, то ток в этой обмотке будет изменяться соответственно изменению насыщения сердечника, т. е. будет содержать переменную составляющую удвоенной частоты питания
Такая схема может не иметь фильтров в цепи питания и на выходе, поскольку значительно уменьшаются паразитные наводки. Кроме того, она обеспечивает более высокую стабильность нуля. Нижний предел мощности сигнала управления для такой схемы составляет Вт при уровне входного сигнала порядка 10 мкВ.
Вт при уровне входного сигнала порядка 10 мкВ.
§ 26.4. Магнитные модуляторы с выходным импульсным сигналом
 Наряду с магнитными модуляторами, имеющими выходной переменный ток основной или удвоенной частоты, применяются модуляторы с выходным импульсным сигналом. Под импульсом обычно понимается электрический сигнал в виде тока или напряжения, который в течение некоторого промежутка времени остается неизменным по полярности, но изменяется по величине. Затем до поступления очередного импульса ток и напряжение равны нулю. Форма импульса может быть самой разнообразной: прямоугольной, треугольной, трапецеидальной и т. п.
Наряду с магнитными модуляторами, имеющими выходной переменный ток основной или удвоенной частоты, применяются модуляторы с выходным импульсным сигналом. Под импульсом обычно понимается электрический сигнал в виде тока или напряжения, который в течение некоторого промежутка времени остается неизменным по полярности, но изменяется по величине. Затем до поступления очередного импульса ток и напряжение равны нулю. Форма импульса может быть самой разнообразной: прямоугольной, треугольной, трапецеидальной и т. п.
В модуляторах с выходным импульсным сигналом промежуток времени между импульсами значительно превышает их длительность. Амплитуда импульса определяется величиной управляющего сигнала на входе модулятора, полярность импульса — полярностью управляющего сигнала. Питание модулятор.] с импульсным выходным сигналом осуществляется либо достаточно большим по значению переменным током, либо периодическими импульсами постоянного тока.
В первом случае значения переменного ток?, выбирают таким, чтобы сердечники усилителя в течение большем части полупериода находились в состоянии насыщения. Тогда индукция в каждом сердечнике будет меняться дважды за период на 2В,: один раз — от — В» до -Bs, другой раз — от -B, до —В, (напомним, что В, — индукция насыщения). Эти изменения будут происходить за весьма малый промежуток времени (т. с. будет большая скорость  ), поэтому импульсы ЭДС, индуцируемые в выходной обмотке, достигают большой величины.
), поэтому импульсы ЭДС, индуцируемые в выходной обмотке, достигают большой величины.
Когда сигнал на входе отсутствует, импульсы ЭДС e1 и е2, индуцируемые в выходной обмотке при изменении индукции соответственно в первом и втором сердечниках, равны и противоположны по направлению. Следовательно, результирующая ЭДС в выходной обмотке равна нулю (рис. 26.4, а).
При подаче управляющего сигнала на вход моменты насыщения каждого сердечника в соседние полупериоды изменяются в противоположные направления (рис. 26.4, б). Поэтому на выходе модулятора появляются импульсы, величина которых пропорциональна входному сигналу, а полярность определяется направлением тока управления  (dhc. 26.4. я. г). Частота импульса будет вдвое превышать частоту питающего переменного тока, поскольку за один период его изменения индукция изменяется дважды.
(dhc. 26.4. я. г). Частота импульса будет вдвое превышать частоту питающего переменного тока, поскольку за один период его изменения индукция изменяется дважды.
При питании магнитных модуляторов импульсами постоянного тока необходимы дополнительные элементы, обеспечивающие исключение импульсов обратной полярности. Магнитные модуляторы с импульсным выходным сигналом имеют более высокий коэффициент усиления  , чем модуляторы с выходным переменным синусоидальным током.
, чем модуляторы с выходным переменным синусоидальным током.
Особенно большое усиление обеспечивается при импульсном питании модулятора, однако при этом ухудшается чувствительность.
§ 26.5. Магнитомодуляционные датчики магнитных величин
В разд. II были рассмотрены электрические датчики неэлектрических величин, используемые в системах автоматики. В этом параграфе даются краткие сведения о датчиках, используемых для измерения внешних магнитных полей. Эти элементы автоматики удобнее изучать не в специальном разделе, посвященном датчикам, а в главе, посвященной магнитным модуляторам, поскольку магнитомодуляциоииый датчик (называемый также феррозондом) представляет собой, по существу, магнитный модулятор с выходным переменным током удвоенной частоты. Особенность его и отличие от рассмотренных выше магнитных модуляторов в том, что он имеет разомкнутый магнитный сердечник в виде пермаллоевоп трубки или пластинки.
Применение разомкнутого сердечника позволяет измерять малые напряженности внешнего магнитного поля (до  ), даже значительно меньшие, чем напряженность магнитного поля Земли. Магнитомодуляционные датчики широко используются в навигационных приборах, металлоискателях, приборах для геомагнитной разведки, поиска полезных ископаемых, бесконтактных путевых переключателях, магнитных дефектоскопах и других устройствах.
), даже значительно меньшие, чем напряженность магнитного поля Земли. Магнитомодуляционные датчики широко используются в навигационных приборах, металлоискателях, приборах для геомагнитной разведки, поиска полезных ископаемых, бесконтактных путевых переключателях, магнитных дефектоскопах и других устройствах.
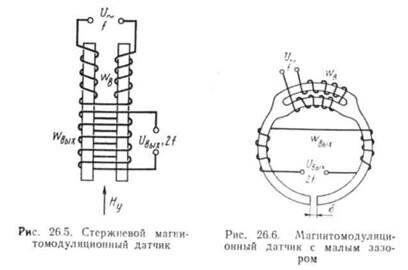
Форма сердечников для магнитомодуляцпонных датчиков определяется назначением этих датчиков. Прямые (стержневые) сердечники применяются в датчиках, измеряющих практически равномерные поля. Простейшая схема такого датчика показана на рис. 26.5. Напряжение питания с частотой подается на обмотки возбуждения
подается на обмотки возбуждения намотанные порознь на дпух параллельных стержнях и включенные встречно. Выходное напряжение
намотанные порознь на дпух параллельных стержнях и включенные встречно. Выходное напряжение  снимается с выходной обмотки
снимается с выходной обмотки охватывающей оба стержня. Постоянное подмагничивание стержней определяется напряженностью внешнего магнитного поля
охватывающей оба стержня. Постоянное подмагничивание стержней определяется напряженностью внешнего магнитного поля  Выходное напряжение изменяется с частотой
Выходное напряжение изменяется с частотой , а его амплитуда пропорциональна
, а его амплитуда пропорциональна
Для измерения неоднородного магнитного поля используется сердечник с малым воздушным зазором (рис. 26.6), куда проникает измеряемое поле. Две половины обмотки возбуждения
(рис. 26.6), куда проникает измеряемое поле. Две половины обмотки возбуждения включены встречно. Выходное напряжение
включены встречно. Выходное напряжение  снимаемое с обмотки
снимаемое с обмотки имеет двойную частоту.
имеет двойную частоту.
Расчет магнитомодуляционного датчика проводится аналогично расчету магнитного модулятора. Если в магнитном модуляторе напряженность подмагничивающего поля определяется током в обмотке управления , то в магпптомодуляционном датчике эта же величина определяется внешним магнитным полем 'с напряженностью
, то в магпптомодуляционном датчике эта же величина определяется внешним магнитным полем 'с напряженностью
Магнитомодуляционный датчик в принципе можно использовать как магнитный модулятор, если разместить на сердечнике обмотку управления Однако коэффициент усиления при этом значительно снижается из-за того, что магнитная цепь разомкнута.
Однако коэффициент усиления при этом значительно снижается из-за того, что магнитная цепь разомкнута.
Все же иногда разомкнутые сердечники применяют и для модуляторов, например когда требуется преобразовать слабый сигнал от источника тока с большим внутренним сопротивлением. В этом случае нужна обмотка управления с очень большим числом витков, а ее значительно проще изготовить именно на разомкнутом сердечнике.
§ 26.6. Назначение и принцип действия бесконтактных магнитных реле
Бесконтактные магнитные реле предназначены для включения различных устройств при подаче управляющего сигнала. Таким образом, они нужны для тех же целей, что и обычные электромагнитные реле. Но если включение нагрузки с помощью электромагнитных реле происходит за счет замыкания электрических контактов, то в бесконтактных реле включение нагрузки происходит за счет значительного и очень быстрого изменения сопротивления. Следовательно, включение и отключение происходят без разрыва цепи и соответственно без связанных с таким разрывом последствий: искрения, дугообразования, окисления и износа контактов.
Основным достоинством бесконтактных реле является высокая надежность, которая обусловлена именно отсутствием контактов и подвижных частей. Кроме того, надо отметить и другие преимущества бесконтактных реле перед контактными: возможность эксплуатации во взрывоопасных и запыленных помещениях, в условиях повышенной влажности и химически агрессивных паров; стабильность параметров срабатывания и отпускания при наличии вибрации, ударных нагрузок, невесомости, при изменении пространственного положения; простота эксплуатации, высокая чувствительность.
Принцип действия бесконтактного магнитного реле основан на использовании в магнитном усилителе положительной обратной связи с В § 23.6 было рассмотрено построение характеристики магнитного усилителя с положительной обратной связью. Из этого построения видно, что с увеличением коэффициента обратной связи характеристика становится все более несимметричной и ее правая ветвь возрастает все-круче и круче. Теоретически уже при
В § 23.6 было рассмотрено построение характеристики магнитного усилителя с положительной обратной связью. Из этого построения видно, что с увеличением коэффициента обратной связи характеристика становится все более несимметричной и ее правая ветвь возрастает все-круче и круче. Теоретически уже при возникает скачкообразное увеличение тока в нагрузке, т. е. релейный режим. Практически вследствие потерь энергии в сердечнике и отклонения его характеристики намагничивания от идеальной релейный режим наступает при
возникает скачкообразное увеличение тока в нагрузке, т. е. релейный режим. Практически вследствие потерь энергии в сердечнике и отклонения его характеристики намагничивания от идеальной релейный режим наступает при
Для получения больших значений в схемах с внутренней обратной связью вводится дополнительно и специальная обмотка обратной связи. Схемы с внешней и внутренней обратной связью называются схемами со смешанной обратной связью. Они наиболее рациональны в конструктивном отношении, поскольку позволяют снизить число витков обмотки обратной связи, а следовательно, уменьшить габариты и упростить изготовление бесконтактного магнитного реле.
в схемах с внутренней обратной связью вводится дополнительно и специальная обмотка обратной связи. Схемы с внешней и внутренней обратной связью называются схемами со смешанной обратной связью. Они наиболее рациональны в конструктивном отношении, поскольку позволяют снизить число витков обмотки обратной связи, а следовательно, уменьшить габариты и упростить изготовление бесконтактного магнитного реле.
Надо отметить, что бесконтактные реле строятся не только на базе магнитного усилителя с положительной обратной связью. Они могут быть созданы и на базе полупроводниковых элементов, в первую очередь транзисторов и тиристоров.
§ 26.7. Характеристики и схемы бесконтактных магнитных реле
Выполним графическое построение характеристики бесконтактного магнитного реле с помощью метода, рассмотренного в § 23.6.
Прежде всего строим характеристику магнитного усилителя без обратной связи, откладывая по оси абсцисс напряженность управляющего поля (и соответствующее ей значение тока управления /у) и по оси ординат напряженность
(и соответствующее ей значение тока управления /у) и по оси ординат напряженность (и соответствующее ей
(и соответствующее ей
значение тока нагрузки ). Для идеального магнитного усилителя
). Для идеального магнитного усилителя  , поэтому линейный участок характеристики / на рис. 26.7 имеет угол наклона к оси ординат 45°. На этом же графике строим характеристику обратной связи, представляющую собой прямую 2, проведенную по отношению к оси ординат под углом
, поэтому линейный участок характеристики / на рис. 26.7 имеет угол наклона к оси ординат 45°. На этом же графике строим характеристику обратной связи, представляющую собой прямую 2, проведенную по отношению к оси ординат под углом
Так как мы проводим построение для случая , то
, то и
и
|
|

прямая 2 проходит ниже линейного участка характеристики 1. Пересечение характеристики / и прямой 2 дает значение тока нагрузки при Затем проводим несколько прямых, параллельных прямой / из различных точек, соответствующих новым значениям
Затем проводим несколько прямых, параллельных прямой / из различных точек, соответствующих новым значениям  Обратите внимание, что при этом пересечение происходит не в одной, а в двух и даже трех точках. Теоретически характеристика
Обратите внимание, что при этом пересечение происходит не в одной, а в двух и даже трех точках. Теоретически характеристика  имеет S-образную форму. Часть этой характеристики (участок бв на рис. 26.7) показана пунктиром. Работа усилителя на этом участке невозможна, поскольку электрическая цепь находится в неустойчивом режиме. Реальная характеристика
имеет S-образную форму. Часть этой характеристики (участок бв на рис. 26.7) показана пунктиром. Работа усилителя на этом участке невозможна, поскольку электрическая цепь находится в неустойчивом режиме. Реальная характеристика  показана сплошной линией. При постепенном изменении управляющего сигнала (начиная с больших отрицательных значений —
показана сплошной линией. При постепенном изменении управляющего сигнала (начиная с больших отрицательных значений — ) в сторону увеличения (абсолютное значение тока при этом уменьшается) ток в нагрузке сначала плавно изменяется до точки в. Дальнейшее изменение тока
) в сторону увеличения (абсолютное значение тока при этом уменьшается) ток в нагрузке сначала плавно изменяется до точки в. Дальнейшее изменение тока в этом же направлении приводит к скачкообразному изменению тока: переход из точки в в точку а. Затем снова происходит плавное незначительное изменение тока нагрузки: участок характеристики правее точки а.
в этом же направлении приводит к скачкообразному изменению тока: переход из точки в в точку а. Затем снова происходит плавное незначительное изменение тока нагрузки: участок характеристики правее точки а.
При изменении управляющего тока в противоположном направлении (от положительных значений до отрицательных) ток нагрузки сначала плавно изменяется до точки б, в которой происходит скачок к минимальному значению в точке г. В результате характеристика получает вид, как у поляризованного реле с размыкающим контактом. Максимальное значение тока
до отрицательных) ток нагрузки сначала плавно изменяется до точки б, в которой происходит скачок к минимальному значению в точке г. В результате характеристика получает вид, как у поляризованного реле с размыкающим контактом. Максимальное значение тока соответствует замыканию контакта, а минимальное значение тока нагрузки — размыканию контакта. В обычном контактном реле это минимальное значение тока нагрузки естественно равно нулю.
соответствует замыканию контакта, а минимальное значение тока нагрузки — размыканию контакта. В обычном контактном реле это минимальное значение тока нагрузки естественно равно нулю.
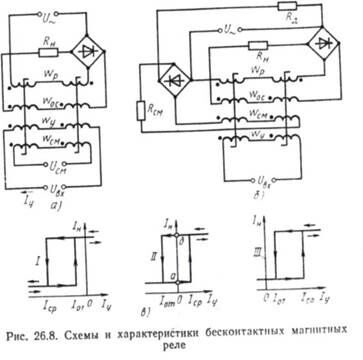
Схемы бесконтактных магнитных реле со смещением показаны на рис. 26.8, а, б. В схеме по рис. 26.8, а обмотка смещения питается от самостоятельного источника питания. На практике благодаря смещению можно получить разный вид характеристик бесконтактного реле (рис. 26.8, в).
Если сместить характеристику вправо таким образом, чтобы ось ординат проходила посередине петли гистерезиса этой характеристики (рис. 26.8, в), то бесконтактное магнитное реле может выполнять роль триггера, т. е. запоминающего устройства. При  реле имеет два устойчивых состояния (точки а и б на рис. 26.8, в). Реле будет находиться в том состоянии, в котором оно находилось до снятия управляющего сигнала
реле имеет два устойчивых состояния (точки а и б на рис. 26.8, в). Реле будет находиться в том состоянии, в котором оно находилось до снятия управляющего сигнала Если раньше ток управления был отрицательным, то состояние реле определяется точкой а (минимальный ток нагрузки). Если раньше ток управления был положительным, то состояние реле определяется точкой б (максимальный ток нагрузки). Значит, такое реле «запоминает» свое предыдущее состояние.
Если раньше ток управления был отрицательным, то состояние реле определяется точкой а (минимальный ток нагрузки). Если раньше ток управления был положительным, то состояние реле определяется точкой б (максимальный ток нагрузки). Значит, такое реле «запоминает» свое предыдущее состояние.
Правда, если временно будет отключено напряжение питания, то после его повторного включения состояние реле будет неопределенным (а или б). Оно обусловлено случайными причинами: неидентичностью сердечников и обмоток.
В схеме по рис. 26.8, б обмотка смещения питается выпрямленным током от того же источника, что и рабочая обмотка. Этим обеспечивается стабилизация тока срабатывания при колебаниях напряжения питания.
Для основных параметров бесконтактного магнитного реле приняты те же термины, что и для обычных контактных реле. Ток управления, при котором ток нагрузки изменяется скачком от минимального до максимального значения, называют током срабатывания. Соответственно ток управления, при котором ток нагрузки скачком уменьшается, называют током отпускания.
Недостатками бесконтактных магнитных реле являются следующие их отличия от обычных реле: переключение происходит лишь в одной цепи (заменяется как бы только одна пара контактов), минимальный ток отличен от нуля.
§ 26.8. Переходные процессы в бесконтактных магнитных реле
 Важным преимуществом бесконтактных магнитных реле по сравнению с обычными электромеханическими реле является более высокое быстродействие.
Важным преимуществом бесконтактных магнитных реле по сравнению с обычными электромеханическими реле является более высокое быстродействие.
Рассмотрим, как происходит изменение во времени токов в обмотках магнитного реле по графикам, приведенным на рис. 26.9. Здесь показаны кривые изменения тока управления и тока нагрузки
и тока нагрузки при изменении входного сигнала
при изменении входного сигнала  , вызывающего скачкообразное изменение (уменьшение) тока в нагрузке, соответствующее «размыканию» контакта, т. е. «отпусканию». На графиках использовали обозначения:
, вызывающего скачкообразное изменение (уменьшение) тока в нагрузке, соответствующее «размыканию» контакта, т. е. «отпусканию». На графиках использовали обозначения:  — ток срабатывания;
— ток срабатывания; — ток отпускания.
— ток отпускания.
В процессе отпускания реле можно выделить три этапа.
Первый этан начинается с исходного состояния реле при  В этом состоянии ток в нагрузке имеет максимальное значение, и при подаче отрицательного тока управления
В этом состоянии ток в нагрузке имеет максимальное значение, и при подаче отрицательного тока управления ток нагрузки мало изменяется (участок аб на рис. 26.9, а и участок аб на рис. 26.9, о). Длительность этого этапа
ток нагрузки мало изменяется (участок аб на рис. 26.9, а и участок аб на рис. 26.9, о). Длительность этого этапа определяется скоростью нарастания тока в обмотке управления
определяется скоростью нарастания тока в обмотке управления  (см. график на рис. 26.9, б). В связи с тем что сердечники насыщены, индуктивность будет мала, а следовательно, и постоянная времени
(см. график на рис. 26.9, б). В связи с тем что сердечники насыщены, индуктивность будет мала, а следовательно, и постоянная времени на первом этапе мала. Промежуток времени от 0 до
на первом этапе мала. Промежуток времени от 0 до судя по графикам (рис. 26.9, б, в), очень невелик.
судя по графикам (рис. 26.9, б, в), очень невелик.
Второй этап длится с момента времени  до
до  Именно за это время происходит изменение тока в нагрузке от максимального до минимального значения. Насыщение сердечников обусловлено током нагрузки
Именно за это время происходит изменение тока в нагрузке от максимального до минимального значения. Насыщение сердечников обусловлено током нагрузки  который одновременно является и током в цепи обратной связи. Поскольку ток и насыщение уменьшаются, возрастает индуктивность обмотки управления. В обмотке увеличивается ЭДС самоиндукции, направленная навстречу приложенному напряжению
который одновременно является и током в цепи обратной связи. Поскольку ток и насыщение уменьшаются, возрастает индуктивность обмотки управления. В обмотке увеличивается ЭДС самоиндукции, направленная навстречу приложенному напряжению Ток управления плавно уменьшается (от точки б к точке в на графиках 26.9, а, б) с большой постоянной времени, которая определяется выражением Соответственно уменьшается и ток в нагрузке (график на рис. 26.9,
Ток управления плавно уменьшается (от точки б к точке в на графиках 26.9, а, б) с большой постоянной времени, которая определяется выражением Соответственно уменьшается и ток в нагрузке (график на рис. 26.9, в).
в).
На третьем этапе (при  ) ток в обмотке управления быстро нарастает
) ток в обмотке управления быстро нарастает
до установившегося значения /ууСт, определяемого приложенным напряжением Uy н сопротивлением обмотки управления  Длительность
Длительность
этого этапа невелика, поскольку на участке вг (рис. 26.9, а) обратная связь в усилителе из положительной становится отрицательной и снижается постоянная времени с
Поскольку постоянные времени на первом и третьем этапе относительно малы, время отпускания реле определяется в основном длительностью второго этапа, т. е.
Дифференциальное уравнение цепи управления для второго этапа имеет вид
Так как при имеем
имеем  то решение этого уравнения имеет вид
то решение этого уравнения имеет вид

Из графика переходного процесса (рис. 26.9, б) видим, что при ток
ток
управления
Подставляя это значение в уравнение, после преобразований получим

где —коэффициент запаса по току срабатывания;
—коэффициент запаса по току срабатывания; —
—
коэффициент возврата.
Процесс срабатывания («замыкания» контактов) бесконтактного магнитного реле также можно представить состоящим из трех аналогичных этапов. При этом время срабатывания также в основном определяется длительностью второго этапа:
 (26.2)
(26.2)
Анализ выражений для  и
и показывает, что повысить быстродействие
показывает, что повысить быстродействие
бесконтактных магнитных реле можно путем уменьшения  (т. е. постоянной времени магнитного усилителя без обратной связи); повышением коэффициента обратной связи
(т. е. постоянной времени магнитного усилителя без обратной связи); повышением коэффициента обратной связи ; увеличением коэффициента возврата
; увеличением коэффициента возврата  Нетрудно видеть, что для увеличения
Нетрудно видеть, что для увеличения  надо с помощью смещения переместить статическую характеристику влево. При этом величина
надо с помощью смещения переместить статическую характеристику влево. При этом величина в пределе стремится к единице. Пределом для времени срабатывания (или отпускания) магнитного реле является длительность полупериода питания.
в пределе стремится к единице. Пределом для времени срабатывания (или отпускания) магнитного реле является длительность полупериода питания.
С повышением частоты питания, как и у магнитных усилителей, происходят повышение быстродействия бесконтактных магнитных реле и уменьшение их габаритов.
§ 26.9. Основы расчета и конструирования бесконтактных магнитных реле
Расчет бесконтактного магнитного реле проводят в той же последовательности, что и для обычного магнитного усилителя.
Исходными данными для расчета являются сопротивление нагрузки токи нагрузки (максимальный
токи нагрузки (максимальный  и минимальный
и минимальный  ), частота источника питания
), частота источника питания токи обмотки управления (ток срабатывания
токи обмотки управления (ток срабатывания и ток отпускания
и ток отпускания ), требуемое быстродействие (время отпускания
), требуемое быстродействие (время отпускания и время срабатывания
и время срабатывания ).
).
Обычно целью расчета является определение размеров магнитопровода и обмоточных данных. Размеры магнитопровода определяются величиной максимальной мощности в нагрузке
 и выбранным материалом сердечника:
и выбранным материалом сердечника: 
где —площадь окна намотки;
—площадь окна намотки; —площадь сечения магнито-провода;
—площадь сечения магнито-провода; —коэффициент заполнения окна намотки медным проводом;
—коэффициент заполнения окна намотки медным проводом;  — коэффициент заполнения сечения магнитопровода сталью;
— коэффициент заполнения сечения магнитопровода сталью; —магнитная индукция;—допустимая
—магнитная индукция;—допустимая плотность тока
плотность тока
в обмотке.
Для уменьшения размеров магнитопровода следует применять материалы с высокой индукцией насыщения (пермаллои), увеличивать плотность тока / в обмотке за счет улучшения теплоотдачи обмотки и применения теплостойкой изоляции.
Ещё посмотрите лекцию "Мочевыделительная система" по этой теме.
Размеры магнитопровода, полученные (по 26.3), уточняются по справочнику, где приведены стандартные размеры.
Сначала выполняется построение статической характеристики без обратной связи. Затем по методу, изложенному в § 26.7, строят статическую характеристику усилителя с обратной связью Н подбирают необходимое значение коэффициента обратной связи Кос
Следует отметить, что ширина петли характеристики (см. рис. 26.8, в) магнитного реле уменьшается, а ток холостого хода увеличивается при больших значениях Втпх. Обычно эту величину выбирают на колене кривой намагничивания (выше линейного участка).
Высокая стабильность — одно из главных требований, предъявляемых к магнитному реле. Установлено, что ток срабатывания более стабилен, чем ток отпускания. Объясняется это тем, что ток отпускания зависит от максимального тока нагрузки, который, в свою очередь, зависит от колебаний напряжения питания и сопротивления нагрузки. Поэтому целесообразно применять бесконтактные магнитные реле, работающие на «замыкание».
Для получения достаточной стабильности желательно иметь индуктивное сопротивление рабочих обмоток во много раз большим активного сопротивления нагрузки, что снизит влияние колебаний активного сопротивления на характеристики реле. Для стабилизации тока срабатывания целесообразно применение схемы с автоматическим смещением (см. рис. 26.8, б).
При конструировании бесконтактных магнитных реле используются те же материалы и сердечники, что и для магнитных усилителей. Однако следует иметь в виду, что пермаллои очень чувствительны к механическим нагрузкам, даже к таким сравнительно малым, которые создаются обмотками. Поэтому кольцевые магнитопроводы заключают в защитные каркасы, поверх которых и размещаются обмотки. Все реле также закрывают коробкой и иногда заливают изоляционными компаундами, что кроме защиты от механических воздействий обеспечивает и повышение надежности.


















