
Магнитные усилители специального назначения
Глава 25
МАГНИТНЫЕ УСИЛИТЕЛИ СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ
§ 25.1. Многокаскадный магнитный усилитель
 Для получения больших коэффициентов усиления используется последовательное соединение нескольких магнитных усилителей. В этом случае выходной сигнал предыдущего усилителя является входным сигналом последующего. Такое соединение усилителей называют каскадным, а каждый из усилителей — каскадом. Электромагнитное устройство в целом называют многокаскадным магнитным усилителем. Общий коэффициент усиления многокаскадного магнитного усилителя равен произведению коэффициентов усиления отдельных каскадов. Число отдельных каскадов в магнитном усилителе может достигать 5—6. При этом инерционность многокаскадного усилителя определяется постоянной времени, представляющей собой сумму постоянных времени отдельных каскадов. Поэтому многокаскадные усилители находят применение и в тех случаях, когда необходимо уменьшить инерционность усилителя при заданном коэффициенте усиления.
Для получения больших коэффициентов усиления используется последовательное соединение нескольких магнитных усилителей. В этом случае выходной сигнал предыдущего усилителя является входным сигналом последующего. Такое соединение усилителей называют каскадным, а каждый из усилителей — каскадом. Электромагнитное устройство в целом называют многокаскадным магнитным усилителем. Общий коэффициент усиления многокаскадного магнитного усилителя равен произведению коэффициентов усиления отдельных каскадов. Число отдельных каскадов в магнитном усилителе может достигать 5—6. При этом инерционность многокаскадного усилителя определяется постоянной времени, представляющей собой сумму постоянных времени отдельных каскадов. Поэтому многокаскадные усилители находят применение и в тех случаях, когда необходимо уменьшить инерционность усилителя при заданном коэффициенте усиления.
Рассмотрим схему двухкаскадного реверсивного усилителя с выходным переменным током (рис. 25.1). Схема каждого из каскадов ( и
и  ) ана-
) ана-
логична рассмотренной в гл. 24 дифференциальной схеме реверсивного усилителя. Такой усилитель может использоваться для управления исполнительным двухфазным асинхронным электродвигателем.
На выходе первого каскада ( ) включены мостовые выпрямители
) включены мостовые выпрямители  и
и  , предназначенные для питания обмоток управления второго каскада (
, предназначенные для питания обмоток управления второго каскада ( ). Нагрузка
). Нагрузка  переменного тока включена на выходе второго каскада. Напряжение питания первого каскада
переменного тока включена на выходе второго каскада. Напряжение питания первого каскада  снимается со специальных трансформаторных обмоток
снимается со специальных трансформаторных обмоток , намотанных на сердечниках
, намотанных на сердечниках  таким образом, что наводимые в них из рабочих обмоток
таким образом, что наводимые в них из рабочих обмоток  ЭДС складываются. Поэтому напряжение
ЭДС складываются. Поэтому напряжение  не зависит от изменяющихся напряжений на отдельных обмотках
не зависит от изменяющихся напряжений на отдельных обмотках . Это напряжение остается пропорциональным напряжению питания сети
. Это напряжение остается пропорциональным напряжению питания сети . Следовательно, в данной схеме не нужен отдельным трансформатор питания.
. Следовательно, в данной схеме не нужен отдельным трансформатор питания.
В основном инерционность многокаскадного усилителя определяется инерционностью первого каскада. Поэтому первый каскад обычно выполняют с небольшим коэффициентом усиления и малой постоянной времени. Л необходимый общий коэффициент усиления стремятся получать за счет последующих каскадов. В итоге инерционность, например, двухкаскадного усилителя будет меньше, чем инерционность однокаскадного усилителя одинаковой мощности с тем же коэффициентом усиления.
Пример 25.1. Определить постоянную времени однокаскадного магнитного усилителя с положительной обратной связью при  ;
;  ;
;  Гц.
Гц.
Рекомендуемые материалы
Определить постоянную времени двухкаскадного усилителя, работающего на той же частоте и с таким же коэффициентом обратной связи, но с коэффициентами усиления первого каскада  и второго каскада
и второго каскада  , обеспечивающими общий коэффициент усиления
, обеспечивающими общий коэффициент усиления  . Сравнить эти постоянные времени, полагая для простоты КПД
. Сравнить эти постоянные времени, полагая для простоты КПД
|
|
| Постоянная времени однокаскадного усилителя
|
 с.
с.Из (23.6) получим выражение для постоянной времени при положительной обратной связи
Постоянную времени двухкаскадного усилителя определяем как сумму постоянных времени каждого каскада:


Как видно из данного примера, инерционность двухкаскадного усилителя при том же усилении уменьшается в 30 раз. Для уменьшения инерционности используют питание первых каскадов повышенной частотой и лишь последний (выходной) каскад питают напряжением той частоты, на которую рассчитана нагрузка.
§ 25.2. Быстродействующие магнитные усилители
К быстродействующим относятся магнитные усилители, постоянная времени которых меньше длительности периода переменного питающего напряжения. Если в обычных усилителях на инерционность оказывает основное влияние цепь управления, то в быстродействующих усилителях необходимо учитывать запаздывание и в рабочей цепи. Высокое быстродействие в магнитных усили-
телях (в одном каскаде) может быть обеспечено лишь при использовании высококачественных материалов для сердечников. К таким материалам относятся железоникелевые сплавы (пермаллои), основные достоинства которых — близкая к прямоугольной петля гистерезиса, высокая магнитная проницаемость в слабых полях и малое значение коэрцитивной силы.
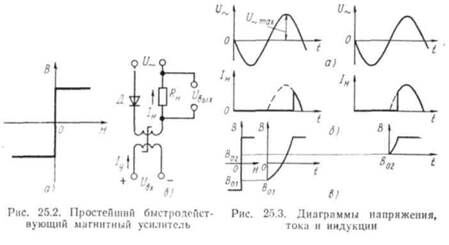
Для упрощенного анализа работы быстродействующего магнитного усилителя воспользуемся теорией идеализированного магнитного усилителя, т. е. пренебрежем шириной петли гистерезиса магнитного материала сердечника. Представим эту кривую графически в виде ломаной линии, состоящей из трех отрезков (рис. 25.2, а). Вертикальный участок этого графика соответствует магнитной проницаемости, стремящейся к бесконечности, а на горизонтальных участках магнитная проницаемость стремится к нулю. Это означает, что в режиме работы сердечника на вертикальном участке индуктивное сопротивление рабочей обмотки стремится к бесконечности, а на горизонтальном участке — к нулю.
Простейшим быстродействующим магнитным усилителем является схема на одном сердечнике с внутренней обратной связью за счет однополупериодного выпрямления в цепи рабочей обмотки (рис. 25.2, б). Работу такой схемы можно рассматривать по двум полупериодам питающего напряжения  . Когда диод Д открыт (полярность приложенного напряжения совпадает с проводящим направлением диода), изменение магнитного состояния сердечника происходит под действием тока в рабочей обмотке. Этот полупериод называется рабочим. Когда диод Д закрыт, изменение магнитного состояния сердечника происходит только под влиянием тока в обмотке управления. Этот полупериод называется управляющим.
. Когда диод Д открыт (полярность приложенного напряжения совпадает с проводящим направлением диода), изменение магнитного состояния сердечника происходит под действием тока в рабочей обмотке. Этот полупериод называется рабочим. Когда диод Д закрыт, изменение магнитного состояния сердечника происходит только под влиянием тока в обмотке управления. Этот полупериод называется управляющим.
|
|
В рабочем полупериоде можно выделить два режима работы усилителя: рабочая точка находится на вертикальном или на горизонтальном участке характеристики намагничивания (рис. 25.2, а). В первом режиме индуктивное сопротивление рабочей обмотки очень велико и ток в рабочей цепи (ток нагрузки  ) равен нулю. Во втором режиме индуктивное сопротивление рабочей обмотки близко к нулю и ток в рабочей цепи
) равен нулю. Во втором режиме индуктивное сопротивление рабочей обмотки близко к нулю и ток в рабочей цепи  определяется только мгновенным значением напряжения питания и активным сопротивлением нагрузки. В зависимости от значения тока управления изменяется момент времени, в который индуктивное сопротивление рабочей обмотки скачком изменяется от бесконечности до нуля (напомним, что речь идет об идеализированном магнитном усилителе). Па рис. 25.3 показаны кривые тока в рабочей цепи для двух значений фазы отпирания усилителя. Рабочий ток, как видно из рисунка, имеет вид срезанных по вертикали синусоидальных импульсов. Максимальная амплитуда импульсов
определяется только мгновенным значением напряжения питания и активным сопротивлением нагрузки. В зависимости от значения тока управления изменяется момент времени, в который индуктивное сопротивление рабочей обмотки скачком изменяется от бесконечности до нуля (напомним, что речь идет об идеализированном магнитном усилителе). Па рис. 25.3 показаны кривые тока в рабочей цепи для двух значений фазы отпирания усилителя. Рабочий ток, как видно из рисунка, имеет вид срезанных по вертикали синусоидальных импульсов. Максимальная амплитуда импульсов
Отпирание усилителя зависит от магнитного состояния сердечника в конце предшествующего (т. е. управляющего) полупериода. Чем выше на вертикальном участке кривой намагничивания находится точка начальной индукции ( и
и  на рис. 25.3, в), тем быстрее наступает момент времени, когда рабочая точка перемещается на горизонтальную часть кривой намагничивания и индукция достигает значения
на рис. 25.3, в), тем быстрее наступает момент времени, когда рабочая точка перемещается на горизонтальную часть кривой намагничивания и индукция достигает значения  . Если в очередном управляющем полупериоде ток управления отсутствует, то к очередному рабочему полупериоду начальное значение индукции не изменится (
. Если в очередном управляющем полупериоде ток управления отсутствует, то к очередному рабочему полупериоду начальное значение индукции не изменится ( ) и выходной сигнал будет иметь максимальное значение. Минимальное запаздывание обусловлено принципом работы усилителя с обратной связью и может колебаться от длительности полупериода (в случае совпадения момента подачи сигнала и началом управляющего полупериода) до длительности периода (в случае подачи сигнала с началом рабочего полупериода).
) и выходной сигнал будет иметь максимальное значение. Минимальное запаздывание обусловлено принципом работы усилителя с обратной связью и может колебаться от длительности полупериода (в случае совпадения момента подачи сигнала и началом управляющего полупериода) до длительности периода (в случае подачи сигнала с началом рабочего полупериода).
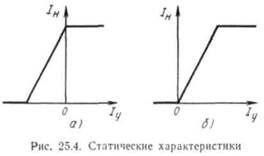
Зависимость выходного тока от управляющего показана на рис. 25.4, а. Как видно из характеристики  , при
, при выходной ток максимален, а для его уменьшения требуется подавать отрицательный входной сигнал (
выходной ток максимален, а для его уменьшения требуется подавать отрицательный входной сигнал ( ). На практике удобнее иметь прямо пропорциональную зависимость выходного сигнала от входного (рис. 25.4, б). Для получения такой характеристики в управляющую цепь включают дополнительный источник напряжения смещения
). На практике удобнее иметь прямо пропорциональную зависимость выходного сигнала от входного (рис. 25.4, б). Для получения такой характеристики в управляющую цепь включают дополнительный источник напряжения смещения  (его называют опорным напряжением) с той же частотой, что и напряжение питания, но сдвинутый по фазе на 180° (рис. 25.5, а).
(его называют опорным напряжением) с той же частотой, что и напряжение питания, но сдвинутый по фазе на 180° (рис. 25.5, а).
При выполнении соотношения между питающим и опорным напряжениями  необходимое размагничивание сердечника будет происходить
необходимое размагничивание сердечника будет происходить в течение управляющего полупериода за счет
в течение управляющего полупериода за счет и при
и при Соответственно при
Соответственно при  ток нагрузки будет равен нулю, а при увеличении тока управления будет возрастать ток нагрузки, как показано на рис. 25.4, б.
ток нагрузки будет равен нулю, а при увеличении тока управления будет возрастать ток нагрузки, как показано на рис. 25.4, б.
На основе двух однополупериодных схем построены двухполупериодные и реверсивные быстродействующие магнитные усилители. При этом усилители с выходным постоянным или переменным током отличаются соединением цепи нагрузки. На рис. 25.5, б показана схема двухполупериодного быстродействующего усилителя, в которой опорное напряжение, обеспечивающее смещение,
подается со вторичной обмотки трансформатора  Поскольку это напряжение в течение одного полупериода запирает диод
Поскольку это напряжение в течение одного полупериода запирает диод  , а в течение другого полупериода—
, а в течение другого полупериода— , в каждый из полупериодов ток проходит только по одной обмотке управления.
, в каждый из полупериодов ток проходит только по одной обмотке управления.
На рис. 26.5 показана полярность опорного напряжения, при которой диод  закрыт, а диод
закрыт, а диод  открыт. Ток управления при этом протекает по цепи
открыт. Ток управления при этом протекает по цепи
 В другой полупериод, когда изменится полярность
В другой полупериод, когда изменится полярность  , ток управления пройдет по обмотке
, ток управления пройдет по обмотке Проследите его путь самостоятельно.
Проследите его путь самостоятельно.
Надо отметить, что быстродействующие магнитные усилители имеют коэффициенты усиления по напряжению и по мощности меньше, чем усилители с нормальным быстродействием. Они становятся быстродействующими именно за счет повышения мощности управляющего сигнала. Поэтому для маломощных усилителей предпочтительнее «обычные» схемы, а не быстродействующие.
Чаще всего быстродействующие усилители применяются для непосредственного усиления сигналов переменного тока (без предварительного выпрямления). Но достоинства быстродействующего усилителя будут сведены на нет, если исполнительное устройство в системе автоматики будет обладать большим запаздыванием. Поэтому реверсивные быстродействующие магнитные усилители получили применение в следящих системах с малоинерционными исполнительными электродвигателями (например, имеющими полый тонкостенный ротор или дисковый ротор с печатной обмоткой).
§ 25.3. Операционные магнитные усилители
Операционные усилители предназначены для использования в измерительных, моделирующих и вычислительных системах автоматики. Главное требование, предъявляемое к ним — это высокая стабильность параметров: постоянство коэффициента усиления и отсутствие дрейфа нуля. Наиболее широко применяются полупроводниковые операционные усилители. Однако и магнитные операционные усилители имеют определенные достоинства. В частности, с помощью магнитного усилителя значительно проще выполнять такую операцию, как суммирование сигналов.
Пусть магнитный усилитель имеет несколько обмоток управления с одинаковым числом витков . Тогда магнитный поток управления будет создаваться суммарным действием всех токов, протекающих по п обмоткам управления:
. Тогда магнитный поток управления будет создаваться суммарным действием всех токов, протекающих по п обмоткам управления:

Точность суммирования для обычного усилителя с несколькими обмотками управления составляет несколько процентов. Для получения высокой точности (сотые доли процента) применяют специальные операционные суммирующие усилители. Высокая точность суммирования сигналов в таких усилителях достигается за счет использования отрицательной обратной связи, охватывающей весь усилитель. Так как при этом уменьшается коэффициент усиления, то для компенсации такого уменьшения применяют положительную обратную связь или многокаскадную схему.
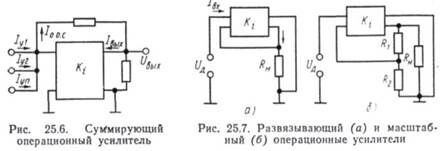
Структурная схема суммирующего операционного магнитного усилителя показана на рис. 25.6. На вход усилителя с коэффициентом усиления по току поступают входные сигналы
поступают входные сигналы  и сигнал отрицательной обратной
и сигнал отрицательной обратной
связи , представляющий собой выходной ток (обычно
, представляющий собой выходной ток (обычно  не весь ток, а
не весь ток, а
его часть  ). В соответствии с уравнением из
). В соответствии с уравнением из для отрицательной обратной связи имеем
для отрицательной обратной связи имеем

При достаточно большом значении  непостоянство коэффициента передачи
непостоянство коэффициента передачи  суммирующего усилителя будет характеризоваться сотыми долями процента, т. е. выходной сигнал будет достаточно строго пропорционален сумме входных сигналов.
суммирующего усилителя будет характеризоваться сотыми долями процента, т. е. выходной сигнал будет достаточно строго пропорционален сумме входных сигналов.
Операционные магнитные усилители могут использоваться в системах автоматики для разных целей. Развязывающий усилитель используется в тех случаях, когда на вход измерительного устройства надо подать сигнал от датчика, обладающего большим внутренним сопротивлением. Если этот сигнал подключать непосредственно на вход схемы, имеющей низкое входное сопротивление, то сигнал датчика сильно уменьшится из-за падения напряжения на внутреннем сопротивлении датчика.
Развязывающий усилитель обеспечивает согласование выходного сопротивления датчика с входным сопротивлением, которое является нагрузкой датчика. Структурная схема развязывающего усилителя показана на рис. 25.7, а. Это как бы суммирующий усилитель с одной входной обмоткой. Если эта обмотка включена между датчиком с выходным напряжением  и нагрузкой
и нагрузкой  , то входной ток усилителя
, то входной ток усилителя
 ■
■
Отсюда входное сопротивление, которым нагружен датчик,

При высоком значении  входное сопротивление будет достаточно большим. Развязывающий усилитель легко преобразуется в масштабный усилитель, изменяющий сигнал датчика в определенное количество раз. В масштабном усилителе (рис. 25.7, б) на вход подается не все напряжение с нагрузки, а его часть (с помощью делителя напряжения на резисторах
входное сопротивление будет достаточно большим. Развязывающий усилитель легко преобразуется в масштабный усилитель, изменяющий сигнал датчика в определенное количество раз. В масштабном усилителе (рис. 25.7, б) на вход подается не все напряжение с нагрузки, а его часть (с помощью делителя напряжения на резисторах и
и ).
).
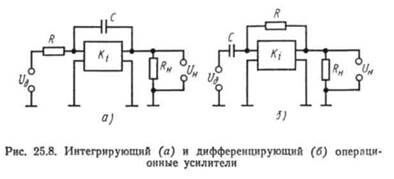
На базе операционного усилителя с одной входной обмоткой строятся схемы интегрирующего и дифференцирующего усилителей.
В интегрирующем операционном усилителе (рис. 25.8, а) сигнал отрицательной обратной связи вводится через конденсатор с емкостью С. При большом значении Ki напряжение на нагрузке будет пропорционально интегралу сигнала датчика:
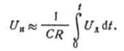
В дифференцирующем операционном усилителе (рис. 25.8, б) емкость С лключена не в цепь обратной связи, а на вход. В этом случае напряжение на нагрузке будет пропорционально производной сигнала датчика:

На базе суммирующего усилителя с несколькими входными обмотками можно выполнять также операции умножения и деления. Для этого необходимо подавать в обмотки управления токи, пропорциональные логарифмам входных сигналов.
§ 25.4. Трехфазные магнитные усилители
Трехфазные магнитные усилители обычно используются для управления исполнительными устройствами систем автоматики при питании от промышленной сети трехфазного переменного тока. Они могут питать нагрузку переменного или постоянного тока.
Трехфазные магнитные усилители с выходным переменным током чаще всего применяются для регулирования частоты вращения трехфазных асинхронных электродвигателей (это, кстати, наиболее распространенный потребитель электроэнергии в народном хозяйстве) и для стабилизации напряжения трехфазных источников питания.
Трехфазные магнитные усилители с выходным постоянным током обеспечивают по сравнению с однофазными усилителями значительное уменьшение пульсаций выпрямленного напряжения, повышение КПД, равномерную загрузку фаз питающей сети.
Трехфазные магнитные усилители представляют собой три одинаковых однофазных магнитных усилителя, рабочие обмотки которых подключаются к трехфазной сети по схеме «звезда» или «треугольник». При этом на каждую фазу может приходиться по одному или по два сердечника. Соответственно
с этим различают трехфазные усилители на трех сердечниках (трехдроссельные) и на шести сердечниках (шестидроссельные).
Рекомендация для Вас - 8 Организация интерфейса МП.
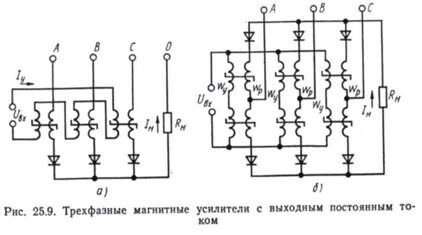
На рис. 25.9 показаны схемы трехфазных усилителей с выходным постоянным током. В каждой фазе схемы по рис. 25.9, а имеется однотактный одно-полупериодный усилитель на одном сердечнике, общая нагрузка Rn включается в нулевой провод. Основное достоинство этой схемы заключается в простоте и дешевизне конструкции усилителя, что обусловлено малым числом элементов. Существенными недостатками усилителя на трех сердечниках по сравнению с усилителем на шести сердечниках (рис. 25.9, б) являются более низкий КПД и более значительные пульсации выпрямленного напряжения на нагрузке. В схеме (рис. 25.9, б) высокий КПД и малые пульсации выходного напряжения обеспечиваются благодаря двухполупериодному выпрямлению тока в каждой из фаз.
В схеме с тремя сердечниками допустимо только последовательное соединение всех трех обмоток управления. Однако при этом в обмотках управления наводится напряжение тройной частоты (из-за несинусоидальности тока в рабочих обмотках при насыщении сердечников). В схеме с шестью сердечниками удается довольно успешно бороться с наведенным напряжением повышенной частоты. Например, в схеме но рис. 25.9, б используется параллельное соединение трех пар обмоток управления и последовательное соединение обмоток управления пары сердечников в каждой фазе. В этом случае в каждой паре обмоток управления wy, относящихся к одной фазе, индуцируются четные гармоники ЭДС. При этом вторые (самые крупные) гармоники ЭДС одной пары обмоток wу сдвинуты по фазе на 120 или 240° относительно этих же гармоник двух других пар обмоток wу. При параллельном соединении отдельных пар обмоток управления, как это сделано в схеме по рис. 25.9, б, четные гармоники тока могут свободно циркулировать по этим обмоткам, не оказывая влияния на источник входного сигнала. Напряжение удвоенной частоты на зажимах обмоток управления будет небольшим, а характеристика «вход-выход»  будет такой же линейной, как у обычных однофазных усилителей. В усилителе на трех сердечниках зависимость
будет такой же линейной, как у обычных однофазных усилителей. В усилителе на трех сердечниках зависимость имеет нелинейный характер.
имеет нелинейный характер.
На рис. 25.10 показан однотактный (нереверсивный) трехфазный усилитель, предназначенный для регулирования частоты вращения асинхронного
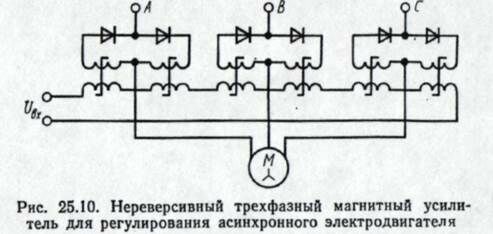
электродвигателя М. Последовательно с каждой фазой обмотки статора двигателя включается однофазный магнитный усилитель. Следовательно, нагрузкой для каждого однофазного усилителя является соответствующая обмотка статора. При этом рабочая обмотка рассчитывается на фазное напряжение. Магнитный усилитель позволяет регулировать напряжение на зажимах статора. При уменьшении напряжения на двигателе снижается его скорость, правда довольно незначительно. Заметим, что для регулирования скорости асинхронного двигателя в широких пределах используются другие схемы (с переключением числа пар полюсов при ступенчатом регулировании, с тиристорными преобразователями частоты питания при плавном регулировании).
Возможно применение трехфазных магнитных усилителей и для автоматизации пуска асинхронных двигателей, когда усилитель включается в комбинации с релейно-контакторной аппаратурой.

















