
Микропроцессорный комплекс автоматизированной сортировочной горки
Микропроцессорный комплекс
автоматизированной сортировочной горки
Основное назначение
Основным назначением системы автоматизированного расформирования составов (АРС) является:
- улучшение качества расформирования составов,
- повышение коэффициента использования путей сортировочного парка,
- улучшения условий и безопасности труда,
- повышение оперативности и более высокий уровень культуры управления процессом расформирования составов,
- повышение производительности сортировочной станции в целом.
Указанные цели достигаются путем применения более современного (по сравнению с системой АРС-ГТСС применявшейся ранее) алгоритма регулирования скатывания отцепов с помощью более прогрессивной техники, увеличения объема информации получаемой оперативным персоналом и сокращением общего количества постовой техники.
Основные функции системы
Система АРС выполняет следующие основные функции:
- обработка директив оперативного персонала,
- слежение за движением отцепа,
- расчет весовой категории отцепа,
- управление интервальной тормозной позицией,
- управление прицельной тормозной позицией,
- ввод-вывод оперативной информации.
Рекомендуемые материалы
Состав системы
Система состоит из напольного и постового оборудования (рис1).
В состав напольного оборудования входят:
- механический и электронный весомеры – 2шт,
- фотодатчик весомерного участка 1 шт,
- рельсовые цепи
- радиолокационные датчики скорости (ДС “Альфа”) – 48шт,
- замедлители КВ и КНП – 49шт,
- устройство контроля заполнения путей (КЗП) – 1шт.
Постовое оборудование состоит из:
- типовых шкафов КТС ЛИУС-2 - 4шт,
- персональной ЭВМ типа “Robotron 1715” – 1шт.
- кроссовых стативов, в расположенных в подвальном помещении горочного поста,
- АРМа электромеханика,
- различные стативы, расположенные в релейных ГАЦ и АРС
- пульта дежурного по сортировочной горке (ДСПГ).
Элементная база
Элементную базу КТС ЛИУС-2 составляют микросхемы с повышенной степенью интеграции. Основные обрабатывающие и управляющие средства реализованы на микропроцессорном комплекте серии 580. В состав элементной базы КТС ЛИУС-2 также входят микросхемы 555, 564,521 и 573 серий. АРМ электромеханика выполнен с использованием однокристальных ЭВМ 1816ВЕ31 и микросхем 580, 573 и 1533 серий.
Устройство и работа АРС на базе КТС ЛИУС-2
Сортировочная горка имеет три тормозных позиции (ТП) верхняя тормозная позиция (ВТП), средняя тормозная позиция (СТП) и нижняя тормозная позиция (НТП). Первые две тормозных позиции должны обеспечивать интервальное торможение, а третья – прицельное торможения. Для управления этими ТП в релейной АРС установлены три шкафа 101, 102 и103 (Рис1), каждый из которых управляет своей ТП соответственно 1й,2й
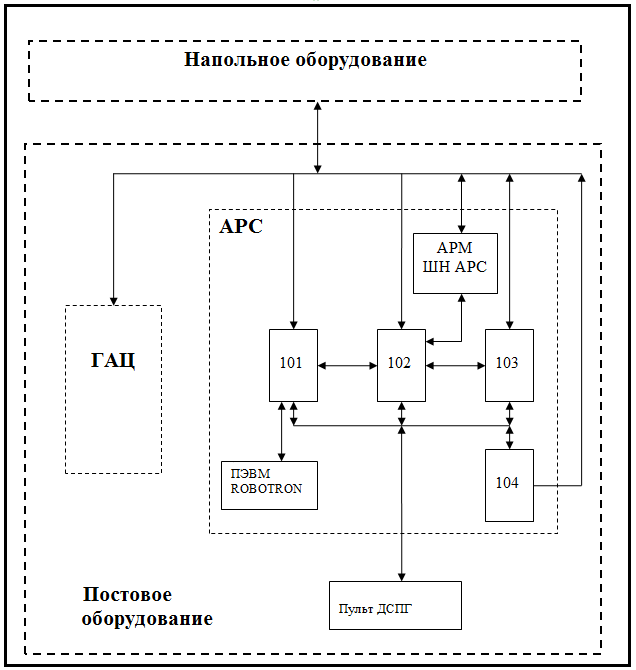
Рис.1
и 3ей. В шкафах АРС размещаются функциональные модули “Регуляторы”. Шкаф 101 имеет один регулятор для управления замедлителями ВТП. В шкафу 102 расположены пять регуляторов, каждый из которых управляет торможением отцепов на СТП в одном из пяти пучков. В шкафу 103 расположены пять регуляторов, каждый из которых управляет торможением отцепов 35 замедлителями расположенными на НТП (Табл1).
| Номер пучка НТП | Количество замедлителей в пучке |
| 1й пучок | 6 |
| 2й пучок | 7 |
| 3й пучок | 7 |
| 4й пучок | 8 |
| 5й пучок | 7 |
Табл.1
Состав “Регуляторов”.
Регуляторы состоят из набора стандартных модулей и все имеют похожую структуру, и отличаются друг от друга только количеством модулей использующихся для связи с внешними объектами. В состав каждого регулятора входят модули:
ГН 09 источник питания
КС 34.03 модуль ввода дискретных сигналов
КС 35.04-01 модуль вывода дискретных сигналов
КС 91.41-01 КС 91.41-02 импульсные источники питания 12 Вольт,
КС 32.04 цифро – аналоговый преобразователь (ЦАП)
КС 52.25 контроллер связи радиального типа, бит-последовательный.
КС 59.04 модуль центрального процессора
КС 54.10 статическое ОЗУ 4Х4 Кбайт (ОЗУ)
КС 54.34 (КC 54.35-01) перепрограммируемое ПЗУ емкостью 4Х4 Кбайт (ПЗУ)
КС 31.41 таймер
КС 44.02 модуль контроля и диагностики
КС 44.04 элемент контроля и диагностики
ПС модуль преобразования сигналов поступающих от скоростемера и сравнения фактической скорости с заданной.
Все модули регулятора вставляются в каркас, котором установлена кросс-плата с 23 разъемами. Одноименные номера контактов всех разъемов соединены друг с другом (т.н. “общая шина”). Обмен информацией осуществляется по запросу модуля центрального процессора. Каждому модулю в каркасе присвоен уникальный 8ми разрядный адрес и процессор обращаясь по нужному ему адресу может управлять работой модулей.
Назначение модулей.
Модуль ГН 09 – источник питания напряжений. Предназначен для преобразования переменного напряжения 220В в постоянное стабилизированное напряжение +5В, -5В, +12В и -12В. Применяется для питания всех модулей входящих в состав “регулятора”.
Модуль КС 34.03 – преобразует 32 входных сигнала напряжением 12В в двоичный код. Выдает полученную информацию на общую шину регулятора по запросу центрального процессора. Модули этого типа применяются:
- в шкафу АРС 101 модули применяются для ввода информации о состоянии рельсовых цепей ВТП (реализована функция слежения), ввода информации с весомера и фотодатчика (функция формирования описателя отцепа), ввода сигналов от коммутаторов с пульта ДСПГ (функция обработки директив оперативного персонала) ввода сигналов от модуля УС-2 (функция управления интервальной тормозной позицией)
- в шкафу АРС 102 модули применяются для ввода информации о состоянии рельсовых цепей СТП (реализована функция слежения), ввода сигналов от коммутаторов с пульта ДСПГ (функция обработки директив оперативного персонала) ввода сигналов от модуля УС-2 (функция управления интервальной тормозной позицией)
- в шкафу АРС 103 модули применяются для ввода информации о состоянии рельсовых цепей НТП (реализована функция слежения), ввода сигналов от коммутаторов с пульта ДСПГ (функция обработки директив оперативного персонала) ввода сигналов от модуля УС-2 и получения информации от устройства КЗП ГТСС о занятости путей (функция управления прицельной тормозной позицией)
Модуль КС 35.04 – модуль вывода дискретных сигналов. Преобразует двоичный код полученный с общей шины регулятора, в 32 сигнала напряжением 24В. Модуль управляется командами центрального процессора. Модули этого типа применяются:
- в шкафах АРС 101 модули применяются для вывода сигналов на индикаторные лампы пульта ДСПГ (реализована функция ввода – вывода оперативной информации).
- в шкафу АРС 102 модули применяются для вывода сигналов на индикаторные лампы пульта ДСПГ и для выдачи информации в АРМ АРС(реализована функция ввода – вывода оперативной информации).
- в шкафу АРС 103 модули применяются для вывода сигналов на индикаторные лампы пульта ДСПГ (реализована функция ввода – вывода оперативной информации) и для опроса устройства КЗП ГТСС для получения информации о занятости путей (функция управления прицельной тормозной позицией)
Модули КС 91.41-01 и КС 91.41-02 - импульсные преобразователи напряжения. Преобразуют постоянное напряжение +5В в напряжение 12В. Используются для задания уровней входных сигналов для модулей КС34.03 (Рис 2)

Рис 2
Модуль КС 32.04 – цифро - аналоговый преобразователь. Преобразует двоичный код, который он получает по общей шине регулятора в постоянное напряжение. Работа ЦАПа осуществляется по командам , которые вырабатывает центральный процессор. Модули этого типа применяются:
- в шкафах 101 и 102 для вывода на пульт ДСПГ информации о расчетной и фактических скоростях отцепа, находящегося на замедлителе той тормозной позиции, которую обслуживает данный “регулятор”.
- в шкафу 103 модуль выполняет те же функции, что и в шкафах 101 и 102, кроме того он используется для вывода информации о занятости путей. выбор контролируемого пути осуществляет оператор сортировочной горки. ДСПГ (реализована функция ввода – вывода оперативной информации).
Модуль КС 52.25 – контроллер связи радиального типа, бит-последовательный. Предназначен для обмена информацией между микропроцессорными блоками и сопряжения с ЭВМ по интерфейсу ИРПС. В АРС используется для передачи информации о весовых характеристиках отцепа между шкафами и ввода корректировок с ПЭВМ “ROBOTRON”.
Модуль КС 59.04 – модуль центрального процессора. Осуществляет взаимодействие между модулями, выполняет функции обработки и записи – чтения информации в соответствии с программой записанной в ПЗУ.
Модуль КС 54.10 – статическое ОЗУ 4Х4 Кбайт. Предназначен для временного хранения информации, получаемой в результате работы центрального процессора. При пропадании напряжения питания информация в модуле не сохраняется.
Модуль КС 54.34 (КС54.35-01) - перепрограммируемое ПЗУ емкостью 4Х4 Кбайт. Предназначен для хранения табличных данных и программы, необходимых для работы центрального процессора.
Модуль КС 31.41 – таймер. Состоит из кварцевого генератора и делителей частоты. Используется для формирования набора частот, необходимых для нормальной работы процессора.
Модуль КС 44.02 – модуль контроля и диагностики. Служит для индикации работы процессора и наличия обмена по каналам связи осуществляющейся через модули КС 52.25. Источником информации служат два семисегментных индикатора, расположенных на лицевой панели блока. Периодическая смена информации ~ 1 раз в секунду означает, что остановки процессора не произошло.
- в шкафу 101 цифра 1-5 высвечиваемая верхним индикатором означат, что идет опрос модуля , отвечающего за связь с соответствующим “регулятором” шкафа 102, с которым осуществляется обмен. Цифра 6 показывает, что идет опрос модуля отвечающего за связь с ПЭВМ “Robotron”.
- в шкафах 102 и103 верхняя цифра 1-3 означает, что идет опрос модуля отвечающего за связь с шкафом 101-103 соответственно.
- цифры высвечиваемые нижним индикатором означают 0 – нет связи, 5 – связь есть. ДСПГ (реализована функция ввода – вывода оперативной информации).
Модуль КС 44.04 – элемент контроля и диагностики. В АРС используется для диагностики отказавших модулей. На лицевой панели модуля расположены светодиодные индикаторы с помощью которых можно определить адрес модуля не отвечающего на запросы процессора (реализована функция ввода – вывода оперативной информации). Определение отказавшего модуля определяется по 5и светодиодам объединенных надписью “Д” в соответствии с таблицей Табл. 2
| Обозначение светодиода | Адрес модуля | |||||||
| “0” | “1” | “2” | “3” | “4” | “5” | “6” | “7” | |
| × | × | ☼ | ● | ● | ● | ● | 10 | |
| × | × | × | ● | ● | ☼ | ● | ● | 20 |
| × | × | × | ☼ | ● | ☼ | ● | ● | 28 |
| × | × | × | ● | ☼ | ☼ | ● | ● | 30 |
| × | × | × | ☼ | ● | ☼ | ● | ● | 38 |
| × | × | × | ● | ● | ● | ☼ | ● | 40 |
| × | × | × | ☼ | ● | ● | ☼ | ● | 48 |
| × | × | × | ● | ☼ | ● | ☼ | ● | 50 |
| × | × | × | ☼ | ☼ | ● | ☼ | ● | 58 |
| × | × | × | ● | ● | ☼ | ☼ | ● | 60 |
| × | × | × | ☼ | ● | ☼ | ☼ | ● | 68 |
| × | × | × | ☼ | ● | ● | ● | ☼ | 88 |
| × | × | × | ● | ☼ | ● | ● | ☼ | 90 |
| × | × | × | ● | ● | ☼ | ● | ☼ | A0 |
| × | × | × | ● | ☼ | ☼ | ● | ☼ | B0 |
| × | × | × | ● | ● | ● | ☼ | ☼ | C0 |
| × | × | × | ● | ☼ | ● | ☼ | ☼ | D0 |
| × | × | × | ● | ● | ☼ | ☼ | ☼ | E0 |
| × | × | × | ● | ☼ | ☼ | ☼ | ☼ | F0 |
| × | × | × | ☼ | ☼ | ☼ | ☼ | ☼ | F8 |
☼ - светодиод горит ● - светодиод не горит × - состояние светодиода не имеет значения
Табл 2
Модуль ПС - модуль преобразования сигналов поступающих от датчика скорости и сравнения фактической скорости с заданной. Преобразует частотный сигнал от ДС “Альфа” в цифровой код, по команде от процессора принимает код соответствующий расчетной скорости для данного отцепа, сравнивает расчетную и фактические скорости, и при необходимости, выдает команду на торможение в модуль УС. (функции управления интервальной и прицельной тормозными позициями)
Управление замедлителями
Модули, расположенные в шкафу 104 предназначены для управления замедлителя. Всего в шкафу расположено 5 каркасов.
- в первом каркасе установлены модули, управляющие замедлителями первого пучка сортировочной горки
- во втором каркасе установлены модули, управляющие замедлителями ВТП и второго пучка
- в третьем, четвертом и пятом каркасе установлены модули управляющие замедлителями третьего , четвертого и пятого пучка, соответственно.
Управление каждым замедлителем осуществляется с помощью двух модулей УС-1 и УС-2.
Модуль УС-1 – логическо – информационный. Предназначен для приема сигналов команды управления замедлителями от модулей ПС или с пульта ДСПГ, индицируют ступень торможения (Т1, Т2, Т3, Т4, ОТ), режим торможения (ручной или автоматический) и передают команды на модуль усилителей УС-2.
Модуль УС-2 - содержит 5 усилителей. Предназначен для приема команд на торможение от модуля УС-1, индикации выполняемой команды, и управления
непосредственно замедлителем.
Автоматизированное рабочее место электромеханика АРС (АРМ ШН АРС).
АРМ ШН АРС предназначен для сбора информации о ходе роспуска, хранения собранной информации и вывода ее электромеханику для анализа работы системы АРС.
Конструктивно АРМ состоит из двух частей:
- шкаф, в котором находятся три каркаса с модулями КТС “Тракт”
- ПЭВМ IBM -486SX33
Информация с напольных устройств и шкафов АРС поступает в шкаф АРМа, где обрабатывается и передается на ПЭВМ. С помощью ПЭВМ она отображается на экране монитора в удобном для пользователя виде и хранится ~ 1 месяц.
Сбор дискретной информации ( рельсовые цепи, фотодатчик, контакты весомера, команды торможение (Т), отторможено (ОТ), автоматика (А)) выполняет каркас 1. Для этого внем установлены :
- модули ввода дискретных сигналов (МДВ) – 18 шт. Эти модули преобразуют поступающие на них сигналы в двоичный код и передают их процессору по его запросу.
-модуль модуль центрального процессора (МЦП) – 1шт. Организует взаимодействие всех модулей в каркасе
"АНАКСИМЕН" - тут тоже много полезного для Вас.
- модуль контроллера последовательного канала (МКПК) – 1 шт. Предназначен для передачи собранной информации в ПЭВМ по последовательному каналу ИРПС.
Сбор аналоговой информации от ДС «Альфа» осуществляется каркасами 2 и3. Для этого в них установлены:
- модули локального контроллера (МЛК) – 25 шт. Эти модули преобразуют поступающие на них сигналы в двоичный код и передают их процессору по его запросу.
-модули модуль центрального процессора (МЦП) – 2шт. Организуют взаимодействие всех модулей в каркасе
- модули контроллера последовательного канала (МКПК) – 2 шт. Предназначены для передачи собранной информации в ПЭВМ по последовательному каналу ИРПС.
Вся информация из шкафа АРМа ШН АРС поступает в ПЭВМ по трем последовательным каналам ИРПС. В ПЭВМ она обрабатывается, записывается на жесткий диск. Информация поступающая на АРМ от напольных устройств не зависит от работы других электронных устройств АРС, что позволяет получать неискаженную информацию о ходе роспуска составов.




















