Курсовая работа: Кинематическое и силовое исследование стержневого механизма. Синтез редуктора
Описание
РЕФЕРАТ
Курсовая работа: страниц - 24, рисунков - 3, таблиц - 2, приложений - 2. Приложения на листах формата А1.
Объект проектирования и исследования – стержневой и зубчатый механизмы.
Цель работы – синтез и анализ этих механизмов.
Проведен синтез, кинематический и силовой анализ этих механизмов.
При проектировании и исследовании механизмов использованы графические и аналитические методы.
ПЛАН МЕХАНИЗМА, ЗВЕНО, ШАТУН, СТЕПЕНЬ ПОДВИЖНОСТИ, СКОРОСТЬ, УСКОРЕНИЕ, СИЛА РЕАКЦИИ, СИЛА ИНЕРЦИИ, УРАВНОВЕШИВАЮЩАЯ СИЛА, ЗУБЧАТОЕ КОЛЕСО, ПЕРЕДАТОЧНОЕ ОТНОШЕНИЕ, МОДУЛЬ, ЭВОЛЬВЕНТА, ШАГ, ТОЛЩИНА ЗУБА, КОЭФФИЦИЕНТ ПЕРЕКРЫТИЯ
СОДЕРЖАНИЕ
Введение…………………………………………………………….......................3
1. Кинематическое и силовое исследование стержневого механизма…….......4
1.1. Структурный анализ механизма……………………………..………....4
1.2. Построение плана механизма……………………………………..…....6
1.3. Построение плана скоростей для заданного положения механизма…6
1.4. Построение плана ускорений для заданного положения механизма…8
2. Силовое исследование механизма…………………………………………...10
2.1. Определение сил инерции звеньев………………………………….10
2.2. Силовой расчет двухповодковой группы Ассура………………….12
2.3. Силовой расчет ведущего звена………………………………….....14
2.4. Определение уравновешивающего момента методом профессора Жуковского Н.Е………………………………………………………………….15
3. Синтез редуктора……………………………………………………………...16
3.1. Подбор чисел зубьев планетарной ступени редуктора…………….16
3.2. Определение действительных значений угловых скоростей звеньев……………………………………………………………………………19
3.3. Построение диаграмм линейных и угловых скоростей……………20
Вывод……………………………………………………………………………..23
Литература……………………………………………………………………….24
ВВЕДЕНИЕ
Целью данной курсовой работы по дисциплине «Теория механизмов и машин» является изучение общих методов исследования механизмов и методов их синтеза. Ознакомление со структурой и классификацией механизмов, изучение методов их кинематического и силового исследования, а также принципов геометрического синтеза зубчатых механизмов.
Курсовая работа включает в себя построение планов стержневого механизма, его планов скоростей и ускорений, а также определение уравновешивающего момента способом Бруевича и Жуковского. Также требуется подобрать числа зубьев планетарной ступени, построить диаграммы линейных и угловых скоростей.
1. Кинематическое и силовое исследование стержневого механизма
1.1. Структурный анализ механизма
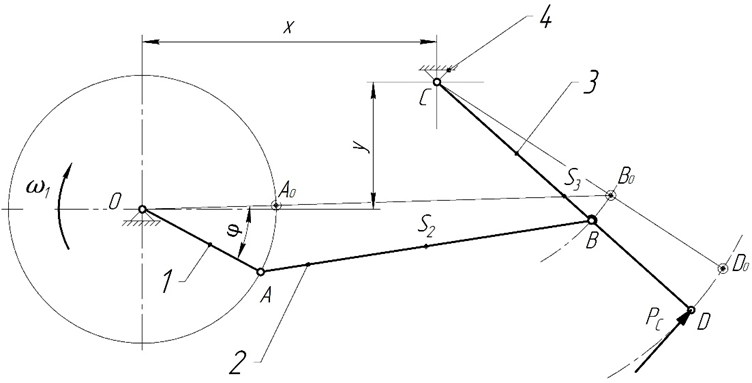
Рисунок 1.1 – Кинематическая схема стержневого механизма
Геометрические параметры:
lOA = 0,08 м; lAB=0,270 м; lBC=0,150 м; lCD=0,270 м; x=0,270 м; y=0,100 м.
Угол поворота кривошипа, определяющий положение механизма для силового исследования φ=400
Частота вращения кривошипа 1 n1= 64 мин-1
Данный механизм состоит из 4-х звеньев и 4-х кинематических пар.
Таблица 1.1 – Характеристика звеньев
№ звена | Характер абсолютного движения | Название |
1 | Вращательное | Кривошип |
2 | Плоско-параллельное | Шатун |
3 | Возвратно-вращательное | Коромысло |
4 | Неподвижное | Стойка |
Количество звеньев n = 3.
Таблица 1.2 – Характеристика кинематических пар
Обозначение КП | По характеру соприкосновения звеньев | По характеру относительного движения | По подвижности |
1-4 | Низшая | Плоская, вращательная | Одноподвижная |
1-2 | Низшая | Плоская, вращательная | Одноподвижная |
2-3 | Низшая | Плоская, вращательная | Одноподвижная |
3-4 | Низшая | Плоская, вращательная | Одноподвижная |
Кинематическая цепь: плоская, простая, замкнутая. Количество одноподвижных кинематических пар P1=4, двухподвижных кинематических пар P2 = 0.
 all_at_700
all_at_700
















