
Регуляторы систем автоматического регулирования тепловым двигателем
Регуляторы систем автоматического регулирования тепловым двигателем
Регуляторы служат либо для поддержания постоянной угловой скорости теплового двигателя, либо для изменения ее по заданной программе. Как правило, в транспортных тепловых двигателях они используются для поддержания постоянной скорости. Следует отметить, что регуляторы не могут обеспечить строгого постоянства скорости, а лишь ограничивают ее изменение в некоторых пределах, близких к заданному значению. Часто в регуляторах предусматривается возможность изменения значения скорости, поддерживаемой регулятором, т. е. изменения его настройки. Регулятор постоянной скорости может быть превращен в программный, если настройка изменяется автоматически при изменении нагрузки или какого-либо другого воздействия на двигатель или регулятор.
Регулятор в общем случае состоит из измерительного органа, усилителей, преобразователей, исполнительного органа и связей между отдельными элементами. Регулятор без усилителей с перемещением исполнительного органа за счет энергии измерительного органа, называется регулятором прямого действия.
Регулятор, в котором для перемещения исполнительного органа используется энергия постороннего источника, передаваемая через усилитель, называется регулятором непрямого действия, а регулирование – непрямым.
Измерительный орган (или кратко «измеритель») состоит из датчика скорости (часто называемого «чувствительным элементом»), который измеряет действительную угловую скорость вала двигателя, устройства, задающего требуемое значение скорости (уровень регулируемой величины), и узла сравнения этих двух значений. При отклонении угловой скорости от заданного уровня в ту или другую сторону измеритель подает сигнал для перемещения исполнительного органа в направлении, при котором отклонение устраняется.
По типу датчика различают измерители:
– центробежные – датчиком являются центробежные грузы; изменение угловой скорости вызывает перемещение их, которое используется в качестве сигнала, характеризующего действительную скорость;
– электрические – датчиком обычно служит тахогенератор постоянного или переменного тока; сигналом является изменение напряжения или частоты тока тахогенератора при отклонении угловой скорости;
Рекомендуемые материалы
– гидравлические – датчиком служит гидронасос; в качестве регулирующего сигнала используется отклонение давления рабочей жидкости, зависящего от угловой скорости;
– пневматические – в качестве сигнала используется повышение давления или разрежение, воздействующее на упругую мембрану.
В центробежных измерителях задаваемая величина угловой скорости определяется усилием нажатия пружины, противодействующим центробежной силе вращающихся грузов. Исполнительный орган регулятора служит для приведения в действие регулирующего органа двигателя. В дизелях таким органом являются рейки топливных насосов, перемещение которых изменяет подачу топлива за цикл.
В регуляторах прямого действия шток соединен с муфтой измерительного органа, а в регуляторах непрямого регулирования – с поршнем сервомотора (чаще всего гидравлического).
Нередко для обеспечения устойчивой работы или улучшения качества регулирования (ускорения процесса регулирования, уменьшения статических или динамических отклонений) вводят дополнительные (положительные либо отрицательные) связи между элементами системы регулирования.
Центробежный регулятор прямого действия.

На рис. 3.3 изображена кинематическая схема простейшего центробежного регулятора прямого действия. Грузы 3 шарнирно укреплены на тарелке 7, которая через зубчатую передачу приводится во вращение от вала двигателя.
Центробежные силы инерции, приложенные к грузам при их вращении, передаются через коленчатый рычаг 5 и подшипник 6 на муфту, 4 регулятора. Между муфтой 4 и опорой 1 помещена пружина 2, имеющая предварительное сжатие. Муфта 4 укреплена так, что может перемещаться только вертикально. Все перечисленные элементы относятся к измерительному органу, который используется в различных типах регуляторов. В регуляторе прямого действия шток 8 соединен с регулирующим органом 10 (рейками топливных насосов или топливным клапаном) посредством рычага 9 и является одновременно выходным элементом измерительного органа и исполнительным органом. Регуляторы, у которых ось поворота грузов перпендикулярна оси вращения их, называются коническими, а регуляторы, в которых эти оси параллельны, — плоскими. В некоторых регуляторах нажатие пружины приложено не к муфте, а к грузам или рычагам, на которых установлены грузы.
Когда нагрузка двигателя уменьшается, угловая скорость его вала растет и грузы расходятся. Муфта поднимается и уменьшает подачу топлива так, чтобы крутящий момент двигателя соответствовал новому моменту нагрузки. Установившийся режим работы двигателя возможен при соблюдении двух условий: крутящий момент двигателя должен равняться моменту сопротивления нагрузки, силы, действующие на муфту регулятора, должны взаимно уравновешиваться.
На муфту регулятора, помимо центробежной силы инерции грузов, действуют сила нажатия пружины Fпр, вес муфты и пружины, а также часть веса грузов и рычагов. Обозначим через приведенный к муфте вес всех действующих на нее частей регулятора. Сила

называется поддерживающей силой регулятора. Она зависит от положения муфты, так как, например, при поднятии муфты увеличивается нажатие пружины. Сила Q при этом также изменяется вследствие изменения положения грузов и рычагов. Зависимость F(z), где z — координата положения муфты, называется характеристикой поддерживающей силы регулятора.
Центробежная сила, действующая на грузы, равняется

где ωД — угловая скорость вращения вала двигателя; r - радиус вращения центра тяжести груза; kгр — величина, зависящая от массы грузов и подвижных частей регулятора, связанных с ними, а также от передаточного отношения между валом двигателя и осью вращения грузов.
Муфта регулятора может совершать лишь относительно небольшие перемещения, ограниченные упорами. При малых перемещениях величина kгр меняется весьма мало. Перемещение муфты приблизительно пропорционально изменению радиуса r. Если условно принять за начало отсчета координаты z муфты точку, соответствующую z = 0, то приведенная к муфте центробежная сила

где kц — величина, зависящая от kгр, соотношения длины плеч рычага 5 и его положения.
Практически в применяемых регуляторах kц изменяется мало, и для качественного анализа можно принять его постоянным. Тогда при постоянной угловой скорости характеристика центробежной силы С(z) может быть изображена прямой линией, проходящей через начало координат (рис. 3.4).
Если пренебречь трением в подвижных частях регулятора, то при установившемся режиме работы центробежная сила должна уравновешивать поддерживающую силу регулятора:

Положение динамического равновесия регулятора (т. е. вращения при z=соnst) соответствует точке пересечения характеристик поддерживающей и центробежной сил.

Когда муфта поднимается, пружина сжимается и поддерживающая сила увеличивается. Угол наклона характеристики поддерживающей силы может быть больше (рис. 1.34, линия F2) или меньше (линия F1) угла наклона характеристики центробежной силы по отношению к оси абсцисс. В первом случае измеритель обладает устойчивой статической характеристикой, так как при выведении муфты из положения равновесия (точка А), например, при увеличении z до z′ появляется разность сил F-С, стремящаяся вернуть муфту в положение равновесия. Во втором же случае при характеристике поддерживающей силы, соответствующей линии,АВ1, появляется разность сил С-F, стремящаяся к удалению муфты от положения равновесия. Такой измеритель статически неустойчив.

Тангенс угла наклона характеристики С(z) пропорционален  . При устойчивой характеристике измерителя каждому положению муфты соответствует определенное установившееся значение угловой скорости. Положение муфты регулятора практически может изменяться от некоторого минимального значения z1, соответствующего максимальной подаче топлива, до максимального значения z2, при котором подача топлива будет минимальной (см. рис. 3.5). При заданной характеристике поддерживающей силы этим значениям соответствуют точки А и В. Так как в установившихся режимах центробежная сила равна поддерживающей, положение характеристики центробежной силы при изменении z должно изменяться от С1 до С2. Следовательно, угловая скорость изменяется с изменением положения исполнительного органа, которое в свою очередь определяется нагрузкой двигателя.
. При устойчивой характеристике измерителя каждому положению муфты соответствует определенное установившееся значение угловой скорости. Положение муфты регулятора практически может изменяться от некоторого минимального значения z1, соответствующего максимальной подаче топлива, до максимального значения z2, при котором подача топлива будет минимальной (см. рис. 3.5). При заданной характеристике поддерживающей силы этим значениям соответствуют точки А и В. Так как в установившихся режимах центробежная сила равна поддерживающей, положение характеристики центробежной силы при изменении z должно изменяться от С1 до С2. Следовательно, угловая скорость изменяется с изменением положения исполнительного органа, которое в свою очередь определяется нагрузкой двигателя.
Определение. Регуляторы, у которых регулируемая величина является функцией нагрузки, называются статическими.
Если характеристика центробежной силы на участке от z1 до z2 совпадает с характеристикой поддерживающей силы, то nД2 = пД1, то он может поддерживать постоянную скорость независимо от нагрузки.
Определение. Регуляторы, у которых регулируемая величина не зависит от нагрузки, называются астатическими.

В предыдущих уравнениях силы трения не учитывались. В реальном регуляторе при перемещении муфты возникает сила трения в регулирующем органе (рейка и плунжер топливного насоса или дроссельная заслонка), в механизме регулятора и в передаточном механизме между регулятором и регулирующим органом. Она направлена всегда против движения муфты. При движении муфты вверх центробежная сила должна преодолеть поддерживающую силу и силу трения (рис. 3.6).
Следовательно, при увеличении угловой скорости муфта начнет движение вверх не сразу после начала изменения скорости, а после того, как центробежная сила превысит значение, подсчитанное по формуле

где Rс тр – сила сухого трения при неподвижной муфте.
При снижении угловой скорости муфта начнет опускаться, когда при том же начальном z поддерживающая сила, являющаяся движущей, станет больше суммы центробежной силы и силы трения или


При работе дизеля в связи с периодическим характером рабочего процесса наблюдается вибрация движущихся частей его, которая часто передается исполнительному органу регулятора. Эта вибрация в значительной мере уменьшает влияние сухого трения, и во многих случаях им можно пренебречь.
Для уменьшения статизма иногда вводят в регулятор масляный катаракт (рис. 3.7), поршень 12 которого через пружину 11 и рычаг 9 присоединен к штоку 8 регулятора. Если отверстие А, соединяющее пространства над и под поршнем, достаточно мало, то при быстром перемещении штока центробежная сила преодолевает сопротивление не только пружины 2, но и пружины 11, и, следовательно, характеристика поддерживающей силы становится временно круче, что облегчает условие устойчивой работы. К концу переходного процесса пружина 11 разгружается, и статическая ошибка зависит от жесткости пружины 2, которая при наличии катаракта может быть выбрана меньшей, чем без него. Катаракт может быть также присоединен жестко к рычагу 9, при этом он усиливает вязкое трение в регуляторе.
Пусть в регуляторе рис. 3.3 кроме сухого, имеется вязкое трение (например, катаракт, непосредственно соединенный с рычагом 9).
Условие равенства сил, действующих на муфту регулятора во время его движения, определяется уравнением
 (3.2)
(3.2)
где тм – масса подвижных частей измерительного органа, приведенная к муфте;  – сила вязкого трения; знак sign противоположен знаку скорости перемещения муфты; kв тр, – коэффициент, зависящий от вязкости смазывающей жидкости и параметров катаракта.
– сила вязкого трения; знак sign противоположен знаку скорости перемещения муфты; kв тр, – коэффициент, зависящий от вязкости смазывающей жидкости и параметров катаракта.
Учитывая, что центробежная сила зависит от угловой скорости и координаты муфты, а поддерживающая сила – только от координаты муфты, напишем, как обычно, разложение их в ряд Тейлора с сохранением лишь членов с первой степенью производной:

После подстановки в уравнение движения (3.2) и вычитания из него уравнения установившегося режима получим (с учётом того, что  ) уравнение измерительного органа в абсолютных отклонениях:
) уравнение измерительного органа в абсолютных отклонениях:
 (3.3)
(3.3)
где 
Условием устойчивой работы, как известно, является положительность всех коэффициентов левой части. Так как mм и kв тр всегда положительны, условие устойчивой работы отдельно взятого регулятора прямого действия может быть представлено неравенством
B>0,
т. е., как показано на рис. 3.4, характеристика поддерживающей силы должна быть круче характеристики центробежной силы.
Если пренебречь массой грузов и трением, получим приближенное уравнение измерительного органа:
 (3.5)
(3.5)
В этом случае перемещение муфты линейно зависит от отклонения угловой скорости, и обе величины меняются одновременно.
Для выяснения условий устойчивой работы регулятора с тепловым двигателем нужно совместно исследовать уравнения движения их. Предварительно необходимо вывести уравнения связи между регулятором и регулирующим органом двигателя. При соединении муфты регулятора с регулирующим органом посредством жестких рычагов уравнение связи между регулятором и двигателем можно записать в виде
x=- aиz или ∆x=- aи∆z, (3.6)
где аи коэффициент, зависящий от соотношения плеч и взаимного положения рычагов; х – координата регулирующего органа.
Знак «минус» введен потому, что для координаты регулирующего органа положительным принято направление в сторону увеличения подачи топлива, а для координаты муфты – направление перемещения при расхождении грузов, когда подача топлива должна уменьшаться.
Рассмотрим работу двигателя с регулятором прямого действия, когда момент сопротивления зависит только от угловой скорости. В этом случае система описывается тремя уравнениями: (3.1), (3.3), (3.6).
Установим сначала условия устойчивости при приближенном уравнении (3.5) измерительного органа. Исключив из системы уравнений переменные ∆x и ∆z, получим приближенное уравнение движения двигателя с регулятором прямого действия:

Условие устойчивой работы в этом случае определяется неравенством

Сопоставляя это неравенство с условиями устойчивой работы теплового двигателя без регулятора (А > 0) и регулятора без двигателя (В > 0), следует отметить более широкие возможности их совместной работы, так как возможна устойчивая работа при Aд < О, если В > О, и наоборот: при В <0, если Ад > 0.Если обе величины меньше нуля, система неустойчива.
Установившееся отклонение скорости при постоянном отклонении момента сопротивления равно

При увеличении В статическая ошибка возрастает, как это видно и по статическим характеристикам. Наоборот, увеличение коэффициента саморегулирования снижает статическую ошибку. Таким образом, увеличение Aд полезно и для динамики, и для повышения точности регулирования.
Регуляторы прямого действия применяются в дизелях небольшой мощности (до 500—600 л. с.), так как при увеличении числа цилиндров и мощности возрастает сила, необходимая для перемещения регулирующего органа, что повышает нечувствительность регулятора. Кроме того, при этом требуется увеличение центробежной и поддерживающей силы, что связано с ростом массы грузов, а это, как указывалось, оказывает неблагоприятное влияние на динамику регулирования.
Астатический гидромеханический центробежный регулятор
В мощных транспортных тепловых двигателях наиболее часто применяют центробежные регуляторы, в которых для перемещения регулирующего органа двигателя используется гидравлический привод, обычно называемый сервомотором, или сервоприводом.
Измерительные органы гидромеханических регуляторов имеют такое же устройство, как и в регуляторах прямого действия и могут выполняться плоскими или коническими. Наиболее часто применяют конические измерители с пружиной, действующей на муфту.

Простейшая схема гидромеханического регулятора с коническими измерителями без обратных связей изображена на рис. 3.8. Муфта 4 измерительного органа соединена посредством рычага 9 с золотником 10, который управляет впуском и выпуском рабочей жидкости в полости под поршнем 14 сервомотора 12. Поршень посредством штока 15 и рычагов, не показанных на схеме, соединен с регулирующим органом теплового двигателя. В качестве рабочей жидкости используется дизельное топливо или масло, которое подается к впускному отверстию золотника под давлением.
При уменьшении нагрузки дизеля грузы расходятся, муфта измерителя и золотник 10 поднимаются. Последний открывает отверстие, соединяющее полость сервомотора под поршнем 14 с отверстием для стока. Под действием пружины 13 (рис. 3.8а) поршень по мере вытекания жидкости через отверстие опускается и уменьшает подачу топлива. Новый установившийся режим возможен при соблюдении трех условий: 1) подача топлива должна соответствовать нагрузке двигателя; 2) приведенная к муфте центробежная сила грузов должна равняться поддерживающей силе; 3) золотник 10 должен закрывать отверстие к сервомотору. Последнее условие вытекает из того, что при открытом отверстии поршень 14 продолжает перемещаться и изменять подачу топлива (за исключением положений упора, при которых регулятор не действует).
Таким образом, в установившемся режиме после уменьшения нагрузки поршень 14 занимает новое положение, определяющее уменьшенную подачу топлива, золотник 10 возвращается к первоначальному положению перекрытия отверстия. Следовательно, центробежные грузы 3 и муфта 4 также должны вернуться в начальное положение, что возможно только при восстановлении прежней угловой скорости. Это означает, что угловая скорость вала двигателя в установившемся режиме не зависит от положения исполнительного органа, т. е. регулирование является астатическим.
При увеличении нагрузки угловая скорость в переходном процессе снижается, муфта 4 и золотник 10 опускаются. Поршень 14 под давлением масла поднимается и увеличивает подачу топлива. В новом установившемся режиме поршень 14 занимает положение увеличенной подачи топлива, а измерительный орган – первоначальное положение.
Иногда выполняют сервомотор 14 без пружины с двусторонней подачей рабочей жидкости (рис. 3.8б). В этом случае золотник 10 делают сдвоенным и при перемещении его от положения перекрытия одновременно открываются отверстия для впуска жидкости в одну полость цилиндра и выпуска ее из другой. Принцип действия регулятора при этом не изменяется.
В обоих случаях регулирующий орган перемещается за счет работы насоса, нагнетающего в сервомотор рабочую жидкость. В варианте (см. рис. 3.8б) работа совершается насосом в обоих направлениях. В варианте (см. рис. 3.8а) при подъеме поршня затрачивается работа на перемещение регулирующего органа и повышение потенциальной энергии пружины 13, которая при опускании поршня используется для перемещения регулирующего органа. Поэтому сила, действующая на поршень, и размеры поршня при прочих равных условиях должны быть больше, чем в первом случае. Преимущества варианта (см. рис. 3.8 а) заключаются в том, что конструкция золотника и сервомотора несколько проще и можно увеличить скорость перемещения поршня в одном из направлений по сравнению с другим, что может быть использовано для ускорения устранения перегрузки. Кроме того, в этом варианте можно просто осуществить быстрое снижение подачи топлива, предусмотрев клапан, открывающий отверстие для стока из полости под поршнем 14. Под действием пружины поршень опустится, уменьшая подачу топлива, и, если требуется, прекратит подачу топлива независимо от положения измерительного органа.
Уравнение (3.3) измерительного органа остается справедливым и для гидромеханических регуляторов, к нему надо добавить уравнения сервомотора и обратных связей. По-прежнему будем обозначать координаты муфты через z и координату исполнительного органа через х, сохранив те же знаки их, как для прямого регулятора. Координату золотника обозначим и. Знак ее может быть выбран произвольно. Примем положительным перемещение вниз, соответствующее положительному перемещению исполнительного органа. Положение перекрытия отверстия примем за нулевое. Тогда и=∆u.
Используя уравнение гидромеханики для истечения жидкости через малое отверстие, можно определить расход жидкости через проходное отверстие золотника:

где рн – давление жидкости на входе в корпус золотника; р1 – давление жидкости под поршнем; μ1 – коэффициент расхода через проходное отверстие, зависящий от формы отверстия и свойств жидкости; ρ – плотность жидкости; f1 – сечение проходного отверстия.
Расход жидкости через отверстие равен изменению объема ее в цилиндре сервомотора за единицу времени

где f2 – площадь поршня сервомотора.
Уравнение сил, приложенных к поршню сервомотора при прямом ходе:
р1f2=Fпр+R ,
где Fпр – сила сопротивления пружины и вес подвижных частей; R– перестановочная сила исполнительного и регулирующего органа.
Исключив из уравнений величину р1 получим:
В правой части уравнения переменными являются сечение проходного отверстия, зависящее от координаты золотника, сила пружины, определяемая положением поршня, и перестановочная сила, которая при вязком трении зависит от скорости движения. Изменение силы пружины от положения поршня обычно мало в сравнении с силой предварительного сжатия ее. Влияние вязкого трения незначительно вследствие малой скорости поршня. В первом приближении при небольших отклонениях режима от установившегося можно считать величину под корнем постоянной. При небольшом мертвом ходе и линейной зависимости f1= c1∆и уравнение сервомотора в этом случае имеет вид
 . (3.7)
. (3.7)
Уравнение сил, приложенных к поршню сервомотора при обратном ходе:
Fпр=р1f2 +R
Расход жидкости равен

где рa – давление жидкости в выпускном трубопроводе.
Проделав аналогичные преобразования, получим уравнение сервомотора для обратного хода:
 (3.8)
(3.8)
Путем выбора Fпр и рн можно по желанию сделать коэффициенты при ∆u одинаковыми в обоих направлениях или различными. Часто выбирают скорость при уменьшении подачи топлива большей, чем при ее увеличении.
Как видно из уравнения, сервомотор является астатическим звеном, так как в установившемся режиме  отклонение ∆u= 0 при любом значении х.
отклонение ∆u= 0 при любом значении х.
Так как муфта соединена с золотником рычагом, то уравнение связи между ними запишется:
∆u = -ac∆z, (3,9)
где aс – коэффициент, зависящий от соотношения плеч рычагов.
Таким образом, для дизеля с гидромеханическим регулятором без обратных связей справедлива система уравнений динамики 4-го порядка (3.1), (3.3), (3.7) или (3.8) и (3.9), исследование которой посредством алгебраических преобразований весьма громоздко и определение условий устойчивости в общем виде затруднительно.
Для качественной оценки условий устойчивости и влияния параметров различных звеньев проведем приближенный анализ, используя уравнение (3.5) измерительного органа.
Исключая из системы уравнений х, z и y, получим:
 (3.10)
(3.10)
В установившемся режиме правая часть равна нулю, следовательно, установившееся отклонение угловой скорости при любых параметрах равно нулю, и регулирование является астатическим.
При положительном саморегулировании (Ад > 0) возможна устойчивая работа в условиях апериодического переходного процесса при
 ,
,
что выполнимо лишь при большом коэффициенте саморегулирования.
Гидромеханический регулятор с жесткой обратной связью

Обратной связью, как известно, называется устройство, передающее выходное воздействие какого-либо звена системы регулирования на какое-либо звено, предшествующее первому по цепи регулирования. В гидромеханическом регуляторе обычно используется воздействие исполнительного органа – поршня сервомотора на измерительный орган. Оно может быть осуществлено путем соединения исполнительного органа либо с золотником (рис. 3.9), либо с опорой пружины. По кинематической схеме регулятор с жесткой обратной связью отличается от астатического регулятора (рис. 3.8а) тем, что конец С рычага 9 соединен шарнирно не с неподвижной опорой, а с рычагом 11, связанным с поршнем 14 сервомотора. Вследствие этого рычажная система соединяет муфту 4 и золотник 10 с поршнем 14.
В новом установившемся режиме, например, после уменьшения момента сопротивления, золотник 10 возвращается в первоначальное положение. Поршень 14 занимает новое положение, соответствующее уменьшенной подаче топлива, т. е. точка С опускается в рассматриваемом примере вниз. Это возможно лишь при перемещении точки А вверх, т. е. при увеличении угловой скорости. Регулятор является статическим и характеристика его подобна характеристике регулятора прямого действия.
Система уравнений движения регулятора с жесткой обратной связью состоит, как и для астатического регулятора, из уравнения (3.3) измерителя, уравнения (3.7) или (3.8) сервомотора и уравнения связи, но последнее должно быть изменено.
Пусть рычаг 9 (см. рис. 3.9) занимает в установившемся режиме положение АВС (рис. 3.10) и в переходном процессе – положение A1B1С1. Перемещение рычага можно представить состоящим из двух поворотов: около точки С до положения A1С и около точки A1 до A1C1. Пренебрегая разницей между дугами и хордами, можно найти смещение золотника от установившегося положения из уравнения
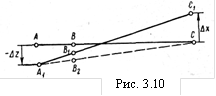
 , (3.11)
, (3.11)
которое является уравнением жесткой обратной связи.
Определим условия устойчивой работы, пренебрегая, как и ранее, инерцией и трением в измерительном органе. Исключая из системы уравнений (3.1), (3.5), (3.7) и (3.11) переменные ∆и, ∆x; и ∆z, получим после преобразований:
 (3.12)
(3.12)
Из сравнения уравнений (3.12) и (3.10) следует, что введение жесткой обратной связи существенно расширяет области устойчивой работы, которая возможна при некоторых значениях Aд<0, если В > 0, и, наоборот, при B< 0, если Aд > 0.
Условие апериодического процесса определяется неравенством
 .
.
Уменьшение ас, т. е. смещение точки В вправо (см. рис. 3.9), облегчает возможность апериодического процесса. Установившееся отклонение угловой скорости
 .
.
Преимущества гидромеханического регулятора в сравнении с регулятором прямого действия заключаются в уменьшении нечувствительности и возможности снижения массы грузов вследствие уменьшения силы, требуемой для перемещения муфты. Однако конструкция его более сложна. Основным недостатком обоих регуляторов является наличие статизма.
Гидромеханический регулятор с гибкой обратной связью (изодромный регулятор)
Гибкая связь в гидромеханических регуляторах, часто называемая изодромом (в переводе с греческого «одинаковая скорость»), соединяет исполнительный орган регулятора с золотником или опорой пружины посредством поршней и маслопровода.

На рис. 3.11 представлена упрощенная кинематическая схема изодромного регулятора, наиболее часто применяемого на мощных тепловозах. Отличия от схемы (см. рис. 3.8а) в основном заключаются в добавлении золотниковой втулки 7 между золотником 6 и его корпусом, компенсационной пружины 13, игольчатого клапана 8 и компенсационного поршня 11 в сервомоторе. Все эти детали вместе с дополнительными маслопроводами представляют собой гибкую обратную связь (изодром). Золотниковое устройство состоит из двух частей: собственно золотника 6, часто называемого плунжером, и золотниковой втулки 7.
При уменьшении нагрузки золотник 6, поднимаясь вместе с муфтой 4, открывает отверстие и поршень 10 начинает опускаться, уменьшая подачу топлива. Одновременно опускается компенсационный поршень 11. Над ним создается разрежение, вследствие чего появляется избыточное давление под поршнем золотниковой втулки 7 и игольчатым клапаном 8. Так как проходное отверстие игольчатого клапана весьма мало, пространство над компенсационным поршнем заполняется в основном жидкостью из пространства над поршнем золотниковой втулки, которая поднимается, сжимая пружину 13, и частично закрывает отверстие, открываемое поднимающимся золотником 6. Так же как и при жесткой обратной связи, в результате повышения скорости поршня 10 и золотниковой втулки 7 и снижения скорости муфты 4 увеличение отверстия прекращается и начинается уменьшение его. Однако, когда движение поршня 10 и муфты 4 к концу переходного процесса становится медленным, компенсационная втулка под действием сжатой пружины 13 возвращается в первоначальное положение за счет перетекания жидкости из полости под поршнем в верхнюю полость через игольчатый клапан.
В установившемся процессе компенсационная втулка всегда занимает положение, когда обе опоры пружины 13 соприкасаются с корпусом золотника, как изображено на рис. 3.11 Равновесное состояние регулятора возможно при возвращении золотника в первоначальное положение перекрытия отверстия. Таким образом, положение муфты и угловая скорость двигателя не зависят от положения поршня и нагрузки. Следовательно, регулятор по установившемуся режиму является астатическим, хотя в переходном процессе действует как статический.
Уравнение гибкой обратной связи (изодром) может быть выведено на основании следующих соображений.
При перемещении поршня 10 (см. рис. 3.11), например, вверх над компенсационным поршнем 11 создается избыточное по отношению к нижней полости давление, вследствие чего золотниковая втулка перемещается вниз, преодолевая усилие Fпр пружины. Часть жидкости перетекает через игольчатый клапан с проходным сечением fи. Координату золотниковой втулки обозначим через у и положительным направлением будем считать перемещение ее вниз от нейтрального положения.
Расход жидкости через игольчатый клапан быть представлено уравнением
 , (3.13)
, (3.13)
где fкп – рабочая площадь поршня 11; fвв – верхняя рабочая площадь поршня золотниковой втулки; рвв,.pвн – давления жидкости сверху и снизу компенсационного поршня.
Пренебрегая трением, инерцией и падением давления в трубопроводах, можно написать уравнение равновесия сил, действующих на золотниковую втулку в равновесном положении:
рвв fвв=Fк пр - Gв+рвн fвн
где fвн – нижняя рабочая площадь поршня золотниковой втулки; Fк пр – сила нажатия компенсационной пружины; Gв – вес частей, связанных с золотниковой втулкой.
Сила нажатия пружины зависит от ее начального натяжения в установившемся положении и от перемещения золотниковой втулки. Поэтому расход жидкости является нелинейной функцией координаты последней. Используя разложение в ряд Тейлора, можно представить расход жидкости через игольчатый клапан равенством
 ,
,
где fиφи уст – расход жидкости в момент переходного процесса, когда золотниковая втулка занимает положение установившегося режима.
Подставив его в уравнение (3.13), получим линейное уравнение изодрома для движения поршня 10 вверх в абсолютных отклонениях:  (3.14)
(3.14)
При перемещении поршней сервомотора вниз уравнение равновесия сил, действующих на золотниковую втулку, имеет вид
рвн fвн=Fк пр+Gв+рвв fвв . (3.15)
Расход жидкости через игольчатый клапан равен
 .
.
Учитывая изменения направления сил и перемещений, можно написать линейное приближенное уравнение изодрома для движения поршня сервомотора вниз в абсолютных отклонениях
 . (3.16)
. (3.16)
Это уравнение отличается от уравнения (3.14) коэффициентами fвн,  и φи 1уст, которые при перемене направления движения золотниковой втулки изменяются вследствие изменения рабочей площади поршня золотниковой втулки и влияния ее веса. Можно так подобрать соотношение рабочих площадей компенсационного поршня и поршня золотниковой втулки, что коэффициенты уравнений (3.14) и (3.16) могут быть приблизительно одинаковыми.
и φи 1уст, которые при перемене направления движения золотниковой втулки изменяются вследствие изменения рабочей площади поршня золотниковой втулки и влияния ее веса. Можно так подобрать соотношение рабочих площадей компенсационного поршня и поршня золотниковой втулки, что коэффициенты уравнений (3.14) и (3.16) могут быть приблизительно одинаковыми.
Уравнение сервомотора изодромного регулятора отличается от уравнения (3.7) тем, что оно должно учитывать влияние компенсационного поршня. При движении поршня сервомотора вверх условие равенства сил, действующих на него, может быть представлено уравнением
р1f2=Fпр+R+fкп(рвв-рвн)
Сечение проходного отверстия золотника зависит от разности перемещений золотника и золотниковой втулки. Линейным приближением этой зависимости является равенство
f1=c1(Δи-Δу). (3.17)
Расход жидкости через отверстие золотника равен
 .
.
Рекомендуем посмотреть лекцию "16 Экологическое нормирование качества атмосферного воздуха".
Используя уравнение (3.15), исключим переменное давление и получим уравнение изодрома
 .
.
В подкоренном выражении правой части уравнения переменными являются силы пружин сервомотора и компенсационной, зависящие от положения поршня и золотниковой втулки соответственно. Если пренебречь их отклонениями, приняв средние значения, и использовать уравнение (3.17), можно получить линейное приближенное уравнение сервомотора при движении поршня вверх
 .
.
Уравнение движения сервомотора при движении поршня вниз отличается в общем случае величиной коэффициента а2, который можно в случае необходимости сделать одинаковым для обоих направлений.
Как следует из рассмотрения условий устойчивой работы теплового двигателя с различными системами регуляторов, увеличение коэффициента саморегулирования двигателя с нагрузкой всегда расширяет область устойчивой работы. При электрической передаче этот коэффициент в основном определяется характером зависимости магнитного потока генератора от угловой скорости и может в широких пределах изменяться путем выбора системы возбуждения генератора и характеристик ее элементов.




















