
Общие сведения о датчиках информационно-измерительных систем
ГЛАВА 1. Общие сведения о датчиках информационно-измерительных систем
Практика измерений в России имеет тысячелетнюю историю. Еще во времена Киевской Руси, в ходу были «антропометрические» единицы - вершок, пядь, локоть. Первая попытка стандартизации измерений датируется 1070 г., когда великий князь Святослав Ярославович ввел в качестве меры длины свой «золотой пояс». Весовые меры (осьмины) появились во времена Ивана Грозного и были узаконены Двинской грамотой. Петр I допустил к хождению в России английские меры (футы, дюймы). В XIX веке Россия делала попытки ввести единые стандарты на все основные физические величины. По инициативе Петербургской академии Наук в 1875 г. была собрана Парижская конференция, на которой было учреждено Международное бюро мер и весов. Эта организация оказалась не слишком эффективной. Только через 85 лет, в начале 60-х годов ХХ века под руководством профессора Г.Д. Бурбона создается международная комиссия по разработке единой системы проведения измерений. С 1963 года существует международное соглашение по предпочтительной системе метрологических единиц (SI).
1.1. Датчики и их характеристики
Датчик (измерительный преобразователь) - это устройство, обеспечивающее функциональное преобразование изменения одной величины в изменение другой величины, участвующей в некотором информационном процессе.
 Рассматривая физические процессы во всех преобразователях, можно в каждом случае установить связь между выходной y и входной х величинами (рис.1.1), изменяющимися во времени:
Рассматривая физические процессы во всех преобразователях, можно в каждом случае установить связь между выходной y и входной х величинами (рис.1.1), изменяющимися во времени:
y = f (x);
здесь x - измеряемая величина, а y - результат измерений.
Математическое (или графическое) описание этой связи называется функцией преобразования датчика (рис. 1.2).
В большинстве случаев при рассмотрении структуры датчиков абстрагируются от достаточно сложного представления о преобразовании информации в пользу процесса преобразования величин, сигналов и т.д. В этом случае, информационные характеристики датчиков, в том числе его функция преобразования, определяются на основании анализа преобразования сигналов в системе.
Рекомендуемые материалы
 Для датчиков с линейной функцией преобразования используется понятие коэффициента преобразования K:
Для датчиков с линейной функцией преобразования используется понятие коэффициента преобразования K:
 ,
,
где xi , yi - текущие значения x, y.
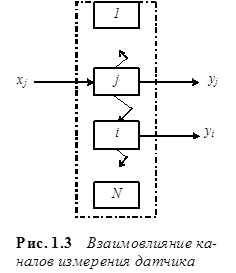
В зависимости от количества измеряемых параметров датчик может описываться одномерной или векторной функцией преобразования (примерами являются однокомпонентный датчик силы и силомоментный датчик). Датчик, имеющий векторную функцию преобразования Y = F(X) является многокомпонентным.
Вообще говоря, любой датчик можно считать многокомпонентным, поскольку на него кроме измеряемой величины действуют влияющие факторы, обусловленные внешними причинами. Тем не менее, мы под многокомпонентным датчиком будем понимать такой преобразователь, который конструктивно предназначен для измерения нескольких параметров. Особенностью многокомпонентного датчика является взаимное влияние каналов измерений (рис. 1.3) Для оценки этого свойства измерителя используется понятие избирательности каналов.
Избирательностью k-ого канала измерительной системы называется выражение вида:
 ; k ¹ j,
; k ¹ j,
где yk - номинальное значение измеряемой величины (компоненты).
Для линейных систем избирательность характеризуется коэффициентом влияния каналов li½j:
 ;
;
здесь yi, yj - сигналы на выходах i-ого и j-ого каналов; xj - входное воздействие на j-ый канал.
В частном случае, при отсутствии влияния каналов - yj = 0, т.е. на выходе канала образуется сигнал пропорциональный только измеряемой величине.
Если функции изменения сигналов дифференцируемы, то под чувствительностью датчика будем понимать величину S, равную:

Чувствительность - важнейшая характеристика датчика, позволяющая оценить выходной сигнал по пределам изменения измеряемой величины и выбрать датчик, отвечающей требованиям измерения. Для линейных преобразователей S = K, и y = Kx = Sx, причем размерности K и S одинаковы, например [В/н].
Чувствительность, в общем случае, зависит от внешних факторов: напряжения питания, температуры, а также спектра и частоты измеряемого воздействия. Например, в паспорте на дифференциальный трансформатор T1ON фирмы Ifelec, Франция указывается его чувствительность S1 = 1,5 мВ/мм/В при частоте напряжения питания 50 Гц и S2 = 17 мВ/мм/В при 400 Гц.
Чувствительность датчиков определяется в статическом и динамическом режимах работы.
Статическая чувствительность датчика Sc измеряется на основании его статической функции преобразования, причем Sc = K и совпадает с S в том случае, если статическая характеристика является прямой, проходящей через начало координат.
Динамическая чувствительность Sд, строго определяется лишь для случая, когда измеряемая функция x является периодической функцией времени. В этом случае, выходной сигнал y имеет ту же периодичность, что и x. Например, если x(t) = x0 + x1 cos wt, то y(t) = y0 + y1 cos (wt +y), где w - круговая частота, w = 2pf, f - частота входного сигнала (в Гц).
Обычно изменения измеряемой величины не являются гармоническими функциями, они могут сложным образом зависеть от времени. Если функцию x(t) разложить в ряд Фурье, то выходной сигнал y(t) будет представлять собой суперпозицию различных составляющих yn(t):

Здесь координаты x0, y0 - определяют рабочую точку Q0 на статической градуировочной характеристике, y - сдвиг фазы между вариациями сигналов на входе и выходе.
Зависимость чувствительности Sд от частоты в динамическом режиме определяет частотную характеристику датчика. Изменения Sд в функции частоты зависят от механической, тепловой и электрической инерции преобразователя, т.е. его массы m, электрического сопротивления R, индуктивности L и емкости C.
Частотные характеристики датчика связаны с порядком дифференциального уравнения, описывающего его конструктивную схему. В соответствии с этим выделяют датчики первого и второго порядка.
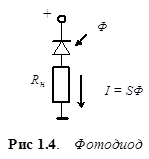
Датчики первого порядка в своей структуре не содержат колеблющихся частей. К ним относятся, например, оптические преобразователи - свето- и фотодиоды. На рис. 1.4 представлена схема фотодиода. Обозначено: Ф - световой поток, I - ток, Rн - сопротивление нагрузки.
Функция преобразования датчика первого порядка описывается дифференциальным уравнением первого порядка:
 ,
,
где A и B - константы.
В комплексной форме соответствующие переменные будут равны:
где x1, y1 - действительные величины.
Уравнение датчика первого порядка в комплексной форме примет следующий вид:

Подставляя значение граничной частоты fг= B/2pA, получим
y = -arctg (f/fг).
 Таким образом, частотная характеристика датчика 1-го порядка определится зависимостью:
Таким образом, частотная характеристика датчика 1-го порядка определится зависимостью:
 , или
, или 
Например, для фотодиода (рис. 1.4) получим: 
В частном случае, при f << fг, S(f) = S(0) . Вид амплитудно- и фазочастотных характеристик (АЧХ и ФЧХ) представлен на рис. 1.5.
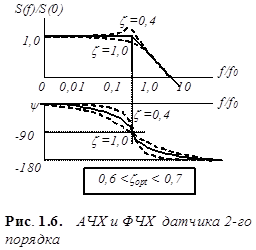
Датчики второго порядка (например, акселерометры) содержат в своей структуре колеблющиеся элементы и характеризуются значениями собственной частоты f0 и затуханием z. Они описываются дифференциальным уравнением вида:
где f0 = (1/2p) ÖC/A, z= B/(2ÖCA).
Частотная характеристика датчика 2-го порядка определяется зависимостью:
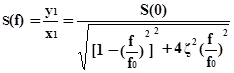
Принято считать, что оптимальное значение коэффициента затухания z лежит в пределах 0,6 … 0,7. Частотные характеристики датчика второго прядка представлены на рис. 1.6.
Полоса пропускания датчика B - это диапазон частот, в котором ординаты амплитудной частотной характеристики уменьшаются относительно их максимального значения не более чем на 3 дБ (рис. 1.7). В расчетах можно считать, что полоса пропускания соответствует горизонтальному участку АЧХ.
 Для датчиков 1-го порядка имеем, 20 lg S(fг)/S(0) = 3 дБ, т.е. B = fг. Ширина полосы пропускания датчиков 2-го порядка зависит от z. При z = 0,6 … 0,7, B » f0.
Для датчиков 1-го порядка имеем, 20 lg S(fг)/S(0) = 3 дБ, т.е. B = fг. Ширина полосы пропускания датчиков 2-го порядка зависит от z. При z = 0,6 … 0,7, B » f0.
Датчик называется линейным в некотором диапазоне измеряемых величин, если его чувствительность не зависит от значения измеряемой величины. В диапазоне линейности выходной сигнал пропорционален измеряемому параметру.
· в статическом режиме: S = K = S(0),
· в динамическом:
 - для датчика 1-го порядка и
- для датчика 1-го порядка и  - для датчика 2-го порядка.
- для датчика 2-го порядка.
Итак, линейность в динамическом режиме зависит от чувствительности статического режима S(0) и параметров частотной характеристики (fг, f0, z). В частном случае, когда датчик работает только в динамическом режиме (это характерно, например, для акустического дальномера) S(0) = 0.
На практике линейность датчика определяется по его градуировочной характеристике. При ее построении распределение экспериментальных данных аппроксимируют уравнением некоторой прямой, используя метод наименьших квадратов. Напомним, что в этом случае сумма квадратов отклонений eу экспериментальных точек от полученной прямой минимальна.
Установлено, что приближение к прямой вида y = a x + b,
достигается при  и
и  , где N - число точек аппроксимации.
, где N - число точек аппроксимации.
Поведение датчика в установившемся режиме описывается его АЧХ. Поведение же в переходных режимах зависит от его инерционных свойств. Характер переходного режима не зависит от закона изменения измеряемой величины, а только от свойств элементов собственно датчика. Быстродействия - это параметр датчика, позволяющий оценить, как выходной сигнал следует во времени за изменением измеряемой величины. Быстродействие, таким образом, характеризует время, необходимое для того, чтобы вклад переходного режима в выходную величину стал пренебрежимо мал в условиях заданной точности. Параметр, используемый для количественного описания быстродействия, называется временем установления. Время установления tуст - это интервал времени, который должен пройти после ступенчатого изменения измеряемой величины, чтобы сигнал на выходе достиг уровня, отличающегося от входного не более чем на e %.
Различают четыре составляющих времени установления tуст (рис. 1.8): время задержки нарастания tзн, - время, соответствующее увеличению сигнала на выходе датчика на 10% от начального; время нарастания tн - время, необходимое для изменения выходного сигнала от 10% до 90%; время задержки спада tзс - время, соответствующее уменьшению сигнала на выходе датчика на 10% от установившегося значения (до 90%) и время спада tс - время, требуемое для уменьшения выходного сигнала от 90% до 10% установившегося значения.
 Поскольку динамика датчиков 1-го порядка в переходном режиме описывается уравнением вида:
Поскольку динамика датчиков 1-го порядка в переходном режиме описывается уравнением вида:
A dy/dt +By = x0
То решением этого уравнения при начальных условиях y = 0, t = 0 будет

где у0 = х0/B и t =A/B = 1/2pfг - установившееся значение и постоянная времени датчика соответственно.
Время установления tуст можно определить по графику переходного процесса (рис. 1.9а). Так, время установления tуст (1%) = 4,6 t = 0,73/fг. Для tуст (10%) справедливо: tуст (10%) = tн = tс = 2,2t. Следовательно, чем выше граничная частота, тем выше быстродействие датчика.
Уравнение датчика 2-го порядка в переходном режиме имеет вид:
A d2y/dt2 +Bdy/dt + Cy = x0
При тех же начальных условиях решение будет зависеть от коэффициента затухания z = B/2ÖCA. Время установления будет минимальным при z = 0,6 ... 0,7 (рис. 1.9б). В этом случае tуст (1%) = 6/w0. tуст (10%) = tн = tс = 2,4/w0, причем w0 = 2pf0 = ÖC/A.
Часто, при оценке переходных процессов наряду с коэффициентом затухания z используется понятие декремента затухания d. Декремент затухания - это величина, обратная числу колебаний, по истечению которых максимальное значение амплитуды убывает в е раз.
d =ln y0/y1.
где е - основание натуральных логарифмов, е » 2,718.
От быстродействия следует отличать производительность устройства (обычно характерную для цифровых систем). Она определяется количеством операций в секунду.
На быстродействие влияют в том числе, факторы не связанные непосредственно с датчиком, например, среда. Так, для резистивного термометрического зонда tуст (10%) составляет 2,6 с в воде, текущей со скоростью 0,2 м/c и 40 с в воздухе, движущемся со скоростью 1 м/c.
Требования чувствительности и быстродействия противоречивы, что необходимо учитывать при расчетах.
1.2. Процесс измерений: информационная модель
Основной функцией любого датчика является измерение. В теории информации этот процесс трактуется как устранение некоторой части неопределенности в системе «измеритель - измеряемый параметр» (рис. 1.10) а количество информации определяется как разность неопределенностей до и после проведения измерения [ ].
 Действительно, до измерения параметра х датчиком у потребителя не было информации об объекте - «область неопределенности» простиралась на весь диапазон измерения от 0 до хmax = ¥. После измерения часть информации об объекте Iи становится доступной потребителю. Потеря информации при измерении DI = I - Iи определяется информационным КПД hI датчика. Чем меньше величина DI, тем уже интервал Dх, в котором находится действительное значение измеряемого параметра. В результате измерения определяется некоторое (номинальное) значение этого параметра, расположенное внутри этого интервала. Следовательно, «область неопределенности» сужается от полной длины шкалы до длины этого интервала. Отрезок длиной n Dх (где n - целое число) образует шкалу измерений или эталон.
Действительно, до измерения параметра х датчиком у потребителя не было информации об объекте - «область неопределенности» простиралась на весь диапазон измерения от 0 до хmax = ¥. После измерения часть информации об объекте Iи становится доступной потребителю. Потеря информации при измерении DI = I - Iи определяется информационным КПД hI датчика. Чем меньше величина DI, тем уже интервал Dх, в котором находится действительное значение измеряемого параметра. В результате измерения определяется некоторое (номинальное) значение этого параметра, расположенное внутри этого интервала. Следовательно, «область неопределенности» сужается от полной длины шкалы до длины этого интервала. Отрезок длиной n Dх (где n - целое число) образует шкалу измерений или эталон.
Измерением называется процесс приема и преобразования информации об измеряемом параметре с целью его количественного сравнения с принятой шкалой или эталоном. (В такой постановке измерение - частный случай распознавания).
 Точность датчика зависит от величины потерь информации DI в процессе преобразования. В метрологии DI оценивается косвенно - через величину отклонения результата измерения уи от реального (истинного) ур значения измеряемого параметра. Dу = ½уи – ур½. Истинное значение остается неизвестным и на практике оно определяется приближенно через значение, полученное датчиком и полосу погрешностей Dу.
Точность датчика зависит от величины потерь информации DI в процессе преобразования. В метрологии DI оценивается косвенно - через величину отклонения результата измерения уи от реального (истинного) ур значения измеряемого параметра. Dу = ½уи – ур½. Истинное значение остается неизвестным и на практике оно определяется приближенно через значение, полученное датчиком и полосу погрешностей Dу.
ур = уи ± Dу.
Всякий датчик обладает реальной и номинальной функциями преобразования (рис. 1.11).
Реальная функция преобразования является полной характеристикой датчика и сложной функцией измеряемого параметра; ее вид зависит от влияющих факторов. Номинальная функция преобразования - это функция, приписываемая датчику и приближенно выражающая зависимость информативного параметра на выходе y от значений измеряемого параметра x. Номинальная функция преобразования всегда одна и та же, в то время как реальная - является случайной величиной, допускающей множество частных реализаций в зависимости от внешних условий.
Объективное свойство измерителя, связанное с различием реальной и номинальной функций преобразования, называется погрешностью.
Погрешность проявляется в процессе измерения; она численно равна величине несоответствия измеренного значения некоторой величины и ее истинного значения (которое неизвестно, т.к. неизвестна реальная функция преобразования). Поскольку, реальная функция преобразования является случайной функцией измеряемой величины, все ее возможные реализации попадают в некоторую полосу относительно номинальной функции преобразования, называемую полосой погрешностей (рис. 1.12).
 Следует различать погрешность собственно датчика и погрешность измерения (т.е. обусловленную несовершенством выбранного метода измерения). Поэтому, основным требованием эксперимента является необходимость обеспечения этой (называемой методической) составляющей погрешности, меньшей погрешности непосредственно измерительного устройства. Правда, в практических расчетах говоря о погрешности измерения, считают, что основная ее часть связана с датчиком.
Следует различать погрешность собственно датчика и погрешность измерения (т.е. обусловленную несовершенством выбранного метода измерения). Поэтому, основным требованием эксперимента является необходимость обеспечения этой (называемой методической) составляющей погрешности, меньшей погрешности непосредственно измерительного устройства. Правда, в практических расчетах говоря о погрешности измерения, считают, что основная ее часть связана с датчиком.
Для построения функции преобразования, а также определения ее отклонения от линейности проводится градуировка датчика. Методов градуировки несколько. Одним из наиболее распространенных является метод сравнительной или косвенной градуировки. В этом случае испытания проводятся с использованием образцового (эталонного) датчика с известной градуировочной характеристикой (рис. 1.13).
В метрологии рассматривается несколько десятков различных погрешностей [ ]. Выбор тех из них, которые в итоге войдут в паспорт информационного устройства зависит от назначения, режима эксплуатации и целого ряда специальных требований. Проводя классификацию погрешностей, ограничимся лишь теми классификационными признаками, которые учитывают специфику функционирования робототехнических систем. Таких признаков всего четыре:
1. По способу выражения: абсолютные, относительные и приведенные.
2. По связи с функцией преобразования: аддитивные (погрешности нуля) и мультипликативные (погрешности чувствительности).
3. По характеру проявления: систематические, случайные и прогрессирующие.
4. По способу оценки: основные и дополнительные.
Рассмотрим эти типы погрешностей подробнее.
 В соответствии с ГОСТ 16263-70 абсолютная погрешность измерения - это разность между показанием датчика xном и истинным значением измеряемого параметра x.
В соответствии с ГОСТ 16263-70 абсолютная погрешность измерения - это разность между показанием датчика xном и истинным значением измеряемого параметра x.
Dx = xном - x.
Различают абсолютные погрешности по входу Dx и по выходу датчика Dy:
Dy = yном - y.
Абсолютная погрешность - неэффективная оценка точности, потому что ее величина имеет различную размерность по входу и выходу и зависит от значений измеряемого параметра. Более объективной оценкой точности датчика является относительная погрешность, но и она является функцией измеряемой величины x.
Относительные погрешности датчика по входу и выходу равны соответственно:
ex = Dx/x, ey = Dy/y. x, y ¹ 0.
Наиболее эффективной оценкой точности является его приведенная погрешность, определяемая выражениями:
exпр = Dxmax/xlim, ey пр = Dymax /ylim ,
где Dxmax , Dymax - максимальные значения абсолютных погрешностей по входу и выходу; xlim - верхний предел диапазона измерения входной величины x.
ylim = f(xlim)
Для датчика с линейной номинальной функцией преобразования:
ylim = Kном xlim,
здесь Kном - номинальный коэффициент преобразования.
 Аддитивной (от англ. add) называется составляющая полной погрешности датчика, не зависящая от измеряемого параметра. Функция преобразования в этом случае имеет вид (рис. 1.14):
Аддитивной (от англ. add) называется составляющая полной погрешности датчика, не зависящая от измеряемого параметра. Функция преобразования в этом случае имеет вид (рис. 1.14):
y = Kном (x+Dox),
где Dox - абсолютная аддитивная погрешность по входу.
Относительные аддитивные погрешности по входу и выходу одинаковы. При измерении малых сигналов, когда x ® Dox, ex ® 100%. Поэтому, аддитивная погрешность определяет порог чувствительности датчика.
 Мультипликативные (от англ. multiplicate) составляющие погрешности - это погрешности, абсолютная величина которых пропорциональна измеряемому параметру x.
Мультипликативные (от англ. multiplicate) составляющие погрешности - это погрешности, абсолютная величина которых пропорциональна измеряемому параметру x.
Для функции преобразования (рис. 1.15) справедливо выражение вида:
y = Kном (1+ek) x
где ek= DK/Kном - относительное изменение коэффициента преобразования.
В общем случае, относительные мультипликативные погрешности по входу и выходу не совпадают, однако, при малых ek их полагают равными.
DK = K - Kном = tg gk (= Dy/Dx).
При x = xlim ® DK = Dyim/xlim
Функции преобразования датчика при наличии аддитивной и мультипликативной погрешностей показана на рис. 1.16. Конечно, для реального датчика функция преобразования не описывается только этими составляющими погрешностей. Тем не менее, для большинства практических расчетов считают, что:
y = Kном (1+ek) x +Doy
 По ГОСТ 16263-70 систематическими погрешностями называются погрешности, имеющие детерминированную функциональную связь с источником, их вызывающим, причем как сама функция, так и ее аргумент известны. Систематическую погрешность можно определить по расхождению между наиболее вероятными значениями измеряемого параметра при использовании различных методик и аппаратуры.
По ГОСТ 16263-70 систематическими погрешностями называются погрешности, имеющие детерминированную функциональную связь с источником, их вызывающим, причем как сама функция, так и ее аргумент известны. Систематическую погрешность можно определить по расхождению между наиболее вероятными значениями измеряемого параметра при использовании различных методик и аппаратуры.
К систематическим погрешностям относятся: погрешность значения опорной величины (например, связанная с изменением уровня напряжения питания мостовой схемы), погрешность, зависящая от условий применения (в частности, скорость реакции термозонда зависит от того, в покоящуюся или движущуюся жидкость он помещен), погрешность, обусловленная неточностью модели датчика или упрощением методики эксперимента (например, вызванная нелинейностью моста Уитстона, самонагревом термометрического сопротивления, теплопроводностью корпуса датчика). Две последние могут быть отнесены к методическим погрешностям.
Прогрессирующими называются погрешности, медленно меняющиеся с течением времени (например, погрешность чувствительности или погрешность градуировочной кривой, обычно обусловленные старением).
Случайные погрешности - это погрешности, появление которых происходит со случайной амплитудой и фазой. Причины их могут быть ясны, однако значения в момент измерений неизвестны. Случайными, в частности, являются: паразитные погрешности (например, тепловые шумы, электромагнитные наводки, флуктуации напряжения питания), погрешности, вызванные влияющими факторами, если период влияющего воздействия существенно меньше периода измерения (к ним может быть отнесена температурная погрешность, если измерения проводятся несколько дней, если же они занимают несколько минут - то погрешность считается систематической). Погрешности, связанные с собственными параметрами датчика, например, порогом чувствительности (для потенциометрического реостатного датчика она проявляется в отсутствии сигнала при перемещении движка на величину, меньшую, чем расстояние между соседними витками), гистерезисом, дискретностью АЦП, погрешности считывания (зависящие от применяемой аппаратуры, например, толщины стрелки прибора и квалификации оператора) также относятся к случайным.
Совокупность порога чувствительности eп и погрешности считывания eс образует погрешность разрешения eр:
eр = Ö eп2 + eс2
Эта погрешность определяет минимальное значение измеряемой величины, регистрируемое данным прибором.
Точность любого датчика зависит от условий его применения - в некоторых случаях при измерении одного и того же параметра значения могут отличаться в десятки раз. Поэтому, все погрешности, в зависимости от условий применения разделяют на две группы:
· основные - обусловленные конструктивно-технологическими факторами;
· дополнительные - погрешности, вызванные паразитным воздействием окружающей среды.
Основной погрешностью называется составляющая полной погрешности датчика, которая определяется в нормальных условиях функционирования. Эти условия указываются в паспорте датчика. Дополнительная погрешность - это составляющая полной погрешности датчика, возникающая при отклонении одной из влияющих величин (температуры, влажности и др.) от нормального значения. Для датчиков, работающих в условиях воздействия механических и климатических факторов, дополнительные погрешности обычно намного превышают основную. Поэтому, в паспорте на датчик могут не приводиться нормальные условия эксплуатации, а лишь указываются границы влияющих факторов, для которых справедливы полученные значения погрешности - так называемые рабочие условия.
1.3. Способы компенсации и учета погрешностей
Во всех случаях погрешность датчика стремятся уменьшить. В некоторых случаях ее удается полностью или частично скомпенсировать. В других, когда компенсация невозможна, погрешности учитываются и вводятся в паспорт датчика.
Источники систематических погрешностей могут быть очевидными, непосредственно вызываемыми условиями работы (например, вибрациями), а могут быть «скрытыми» от прямой регистрации. Для этого случая, необходимо, чтобы влияющая функция изменялась со временем, тогда систематическую погрешность можно обнаружить и компенсировать. В противном случае, ее очень сложно заметить. Единственным способом обнаружения является периодическая поверка нуля и чувствительности по образцовым мерам.
Для компенсации систематической погрешности на практике используются три основных способа - аналитический, методический и схемотехнический.
Аналитический способ основан на введении в исходную формулу известных аналитических выражений. Например, для датчиков на основе металлических ЧЭ, функция преобразования зависит от температуры:
y = f(x, Tо),
В общем случае y = S x или в производных:
При x ¹ f (To) имеем 
Пусть известна относительная мультипликативная температурная чувствительность SkT =  S/T, то
S/T, то
y+dy = [S+SkT dT] x
Тогда, зная реальную температуру датчика определяют DT = T-Tном , и заменяя dT на DT получают окончательно
yT= Sном x + SkT DT x
Второе слагаемое в правой части этого выражения представляет собой поправку в результат измерения.
Характерным примером применения методического способа является компенсация погрешности, вызванной магнитным полем Земли. Измерения проводят дважды: первый раз - при любом положении датчика, а при повторном его ориентацию меняют на 180о.
 Схемотехнический способ предполагает такое построение датчика, при котором отдельные составляющие погрешности взаимно компенсируются. Для этого могут использоваться, например, симметричные мостовые схемы, частично компенсирующие температурную погрешность.
Схемотехнический способ предполагает такое построение датчика, при котором отдельные составляющие погрешности взаимно компенсируются. Для этого могут использоваться, например, симметричные мостовые схемы, частично компенсирующие температурную погрешность.
Функция преобразования симметричного моста Уитстона (рис. 1.17) определяется выражением:
U = E Sr (r1 + r4 - r2 - r3),
где E - напряжение питания, Sr- чувствительность плеча. Стрелками показаны условные направления деформаций под действием влияющих факторов.
Изменение температуры вызывает вариации номиналов плеч моста Dr. Тогда получим
UD = E Sr [(r1+Dr1) + (r4+Dr4) – (r2+Dr2) – (r3+Dr3)].
Если значения Dr для всех плеч одинаковы, то UD= U.
Случайные погрешности приводят к разбросу результатов при повторных измерениях. В большинстве случаев их компенсация представляет собой сложную задачу, однако, иногда их можно устранить защитой измерительного канала от вызывающей причины. С этой целью используют температурную и вибрационную стабилизацию, электромагнитное экранирование и пр. Существует ряд схемотехнических решений - симметричные дифференциальные схемы, применение корреляционных методов и т.д. Примером дифференциальной схемы является измерительный мост, позволяющий компенсировать синфазные случайные погрешности (если источник этих погрешностей действует одновременно на все 4 плеча моста).
Если же случайные погрешности устранить не удается, используют статистическую обработку результатов измерения с целью определения наиболее вероятного значения измеренной величины и пределов погрешности. Результаты измерения и их расхождение характеризуются следующими показателями:
· математическим ожиданием (средним значением по множеству)  , где N - количество измерений;
, где N - количество измерений;
· средней квадратичной погрешностью sу  и дисперсией
и дисперсией  . Если погрешности, сопровождающие различные измерения взаимно независимы, то вероятность их появления описывается нормальным (Гауссовым) распределением Р(у).
. Если погрешности, сопровождающие различные измерения взаимно независимы, то вероятность их появления описывается нормальным (Гауссовым) распределением Р(у).
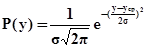
В этом случае, наиболее вероятное значение равно уср, а вероятность появления результатов измерения в указанных пределах равна:
Р(уср ±s) = 68,27%, Р(уср ±2s) = 95,45%, Р(уср ±3s) = 99,73%.
Случайные погрешности также бывают абсолютными, относительными и приведенными. В частности, относительная среднеквадратичная погрешность eу = sу/уном (в расчетах уном приравнивают математическому ожиданию, т.е. принимают уном = уср).
Использование дисперсионных оценок позволяет суммировать статистически независимые погрешности для любых законов распределения.
Для определения случайных погрешностей иногда применяют квантильные оценки (рис. 1.18). Квантильная оценка - это указание максимального значения случайной погрешности (eу)max с заданной доверительной вероятностью P(у).
Общепринятые оценки доверительных вероятностей:
·  P(у) = 0,80 - в стандартах надежности средств электроники, автоматики и измерительной техники;
P(у) = 0,80 - в стандартах надежности средств электроники, автоматики и измерительной техники;
· P(У) = 0,9 ... 0,95 - предпочтительные значения при нормировании случайных погрешностей средств измерения.
Основной недостаток оценки погрешности доверительными вероятностями - это невозможность суммирования значений погрешностей нескольких датчиков.
 В соответствии с ГОСТ 8.011-72 при проведении метрологической поверки датчика необходимо указывать закон распределения погрешностей. В ряде случаев близкие по форме законы приводятся к одному виду.
В соответствии с ГОСТ 8.011-72 при проведении метрологической поверки датчика необходимо указывать закон распределения погрешностей. В ряде случаев близкие по форме законы приводятся к одному виду.
Законы распределения классифицируются по трем основным признакам:
1. По форме: симметричные (нормальный, треугольный и пр.) и скошенные.
2. По числу максимумов в кривой распределения: безмодальные, одномодальные и двухмодальные.
3. По способу аналитического описания: экстремальные (в частности, дискретное двузначное распределение), симметричные экспоненциальные, композиционные и частные (например, арксинусоидальный).
Приедем некоторые примеры законов распределения типовых погрешностей (рис. 1.19).
· погрешность от зазора в кинематической цепи распределена по дискретному двузначному закону, т.к. принимает только два значения: +a, -a (рис. 1.19 а);
· погрешность от гистерезиса имеет композиционное распределение - в виде суммы дискретного двузначного и экспоненциального законов и имеет размытость около точек +a, -a (рис. 1.19 б);
· погрешность от квантования распределена по равномерному закону, т.к. значений больших +b, и меньших -b не встречается, а внутри этого интервала они равновероятны (рис. 1.19 г);
· погрешность от синусоидальной наводки распределена по арксинусоидальному закону;
· погрешность градуировки имеет вид композиции равномерного и экспоненциального распределений;
·  температурная погрешность имеет вид композиции треугольного асимметричного и дискретного двузначного распределений; погрешность от колебаний напряжения питания распределена по треугольному закону.
температурная погрешность имеет вид композиции треугольного асимметричного и дискретного двузначного распределений; погрешность от колебаний напряжения питания распределена по треугольному закону.
Закон распределения погрешностей для электронных систем общепромышленного назначения обычно известен. Например, шумы радиоаппаратуры подчинены нормальному закону распределения (рис 1.19 в).
Применение рассмотренных выше характеристик для оценки точности датчика, предполагает составление соответствующего паспорта. Иногда же для этих целей удобно использовать следующие интегральные оценки: постоянство, правильность, точность.
Постоянство датчика - это такое его свойство, для которого характерны малые случайные погрешности (рис. 1.20). В этом случае, обеспечивается высокая сходимость результатов измерений.
 Правильностью (рис. 1.21) называется способность датчика выдавать результат с малой систематической погрешностью. (Наиболее вероятное значение измеряемой величины близко к истинному).
Правильностью (рис. 1.21) называется способность датчика выдавать результат с малой систематической погрешностью. (Наиболее вероятное значение измеряемой величины близко к истинному).
Точность обозначает свойство датчика давать результаты, индивидуально близкие к истинному значению измеряемой величины. Одновременно обеспечиваются высокие постоянство и правильность (рис. 1.22). Численно точность выражается через суммарную погрешность, учитывающую как случайную, так и систематическую составляющую, которая определяет доверительный интервал вокруг измеренного значения, внутри которого с заданной вероятностью находится истинное значение измеряемой величины.
 Подводя итоги данной главы отметим основные требования, которые следует соблюдать при разработке датчиков робототехнических и мехатронных систем.
Подводя итоги данной главы отметим основные требования, которые следует соблюдать при разработке датчиков робототехнических и мехатронных систем.
1. Необходимо выделить измеряемый параметр и выбрать методику измерения.
2. Разработать структуру информационных модулей, максимально используя симметричные и дифференциальные схемы.
3. Определить влияющие факторы и сформировать рабочие условия функционирования датчика.
Рекомендация для Вас - 12 Турбидиметрия и нефелометрия.
4. Провести градуировку датчика и определить его функцию преобразования.
5. Вычислить значение относительной систематической погрешности.
6. Провести серию испытаний и определить закон распределения случайных погрешностей, а затем вычислить математическое ожидание и дисперсию случайных погрешностей датчика и определить значение относительной случайной погрешности.
7. Провести расчет суммарной погрешности и указать значение доверительного интервала.
8. Составить итоговый паспорт на датчик.
Вопросы для самостоятельной подготовки
- Как определить полосу пропускания датчика?
- Можно ли определить реальную функцию преобразования датчика?
- Зависит ли динамическая чувствительность датчика от статической?
- Обладает ли датчик первого порядка собственной частотой?
- Какой параметр характеризует быстродействие датчика?
- От каких параметров зависит собственная частота датчика второго порядка?
- Какую погрешность вызывают климатические факторы - аддитивную или мультипликативную?
- Можно ли случайную погрешность сделать систематической?
- В чем основное достоинство дисперсионных оценок?
- Как связаны между собой средние квадратичные погрешности при единичном измерении и нескольких измерениях?



















