
Кинематические характеристики механизмов
Лекция N5
Кинематические характеристики механизмов.
Основным назначением механизма является выполнение им требуемых движений. Эти движения могут быть описаны посредствам его кинематических характеристик. К ним относят координаты точек и звеньев, их траектории, скорости и ускорения. К числу кинематических характеристик относятся и такие характеристики, которые не зависят от закона движения начальных звеньев, и определяются только строением механизма и размерами его звеньев и в общем случае зависят от обобщенных координат. Это – функции положения, кинематические передаточные функции скорости и ускорения.
Для создания механизмов, наилучшим образом отвечающих поставленным требованиям, надо знать методы определения кинематических характеристик механизмов.
Различают следующие методы определения кинематических характеристик механизмов.
1. Геометрический – основанный на анализе векторных контуров кинематических цепей механизмов, представленных в аналитическом или графическом виде;
2. Метод преобразования координат точек механизма, решаемый в матричной или тензорной форме, (обычно применяется для исследования кинематических цепей манипуляторов промышленных роботов с использованием ЭВМ);
3. Метод кинематических диаграмм – метод численного интегрирования и дифференцирования, (решаемый с помощью ЭВМ или графически);
4. Метод планов положений, скоростей и ускорений, основанный на решении векторных уравнений связывающих кинематические параметры, решаемых в графическом виде или аналитической форме;
Рекомендуемые материалы
5. Экспериментальный метод.
Кинематика входных и выходных звеньев.

 |
Число независимых друг от друга кинематических параметров механизма с заданными размерами звеньев и структурной схемой равно числу степеней свободы механизма или числу обобщенных координат механизма.
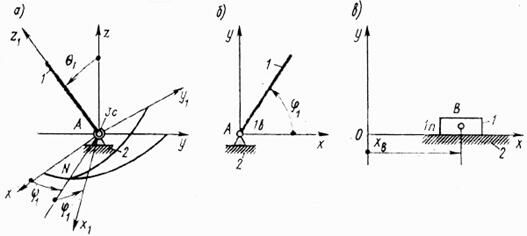
Звено, которому приписывается одна или несколько обобщенных координат, называют начальным звеном. Например, звено 1 вращающееся вокруг неподвижной точки, т.е. образующее со стойкой 2 сферическую кинематическую пару (рис. 5.1, а), имеет три степени свободы и его положение определяется тремя параметрами - тремя углами Эйлера:  . Звено 1, вращающееся вокруг неподвижной оси, т. е. образующее со стойкой 2 вращательную кинематическую пару (рис. 5.1, б), имеет одну степень свободы и его положение определяется одним параметром, например угловой координатой
. Звено 1, вращающееся вокруг неподвижной оси, т. е. образующее со стойкой 2 вращательную кинематическую пару (рис. 5.1, б), имеет одну степень свободы и его положение определяется одним параметром, например угловой координатой  . Звено, перемещающееся поступательно относительно стойки (рис. 5.1, в), имеет также одну степень свободы и его положение определяется одним параметром - координатой
. Звено, перемещающееся поступательно относительно стойки (рис. 5.1, в), имеет также одну степень свободы и его положение определяется одним параметром - координатой  .Любой механизм предназначен для преобразования движения входного звена 1 (рис. 5.2, а, б) или входных звеньев (рис. 5.2, в) в требуемые движения звеньев, для выполнения которых предназначен механизм. Входному звену механизма с одной степенью свободы обычно присваивают номер 1, а выходному звену - номер п, промежуточным звеньям - порядковые номера: 2, 3,..., i,... п - 1.
.Любой механизм предназначен для преобразования движения входного звена 1 (рис. 5.2, а, б) или входных звеньев (рис. 5.2, в) в требуемые движения звеньев, для выполнения которых предназначен механизм. Входному звену механизма с одной степенью свободы обычно присваивают номер 1, а выходному звену - номер п, промежуточным звеньям - порядковые номера: 2, 3,..., i,... п - 1.
Во многих случаях при проектировании машин и механизмов закон изменения обобщенных координат в функции времени удается определить только на последующих стадиях проектирования, обычно после динамического исследования движения агрегата с учетом характеристик сил, приложенных к звеньям механизма, масс и моментов инерции звеньев. В таких случаях движение выходных и промежуточных звеньев определяется в два этапа: на первом устанавливаются зависимости кинематических параметров звеньев и точек от обобщенной координаты, т. е. определяются относительные функции (функции положения и передаточные функции механизма), а на втором - определяются закон изменения обобщенной координаты от времени и зависимости кинематических параметров, выходных и промежуточных звеньев от времени.
Функцией положения механизма называется зависимость углового или линейного перемещения точки или звена механизма от времени или обобщенной координаты.
Кинематическими передаточными функциями механизма называется производные от функции положения по обобщенной координате. Первая производная называется первой передаточной функцией или аналогом скорости (обозначаются  ;
;  ), вторая производная – второй передаточной функцией или аналогом ускорения (обозначаются
), вторая производная – второй передаточной функцией или аналогом ускорения (обозначаются  ).
).
Кинематическими характеристиками механизма называются производные от функции положения по времени. Первая производная называется скоростью (обозначают  ), вторая – ускорение (обозначают
), вторая – ускорение (обозначают  )
)
Связь между скоростью  (или ускорением
(или ускорением  ) точки С на ползуне механизма (рис. 5.3) и передаточной функцией скорости
) точки С на ползуне механизма (рис. 5.3) и передаточной функцией скорости  (или ускорения
(или ускорения  ) той же точки определяется следующими соотношениями:
) той же точки определяется следующими соотношениями:

Определение кинематических характеристик плоского рычажного механизма геометрическим методом
в аналитической форме.
Рассмотрим пример с кривошипно-ползунным механизмом.
К основным размерам, характеризующим кинематическую схему механизма относятся:
1. длина кривошипа - 
2. относительная длина шатуна - 
3. относительная внеосность - 
4. угол наклона направляющей ползуна - 
5. начальная угловая координата звена 1 - 
Изобразим кинематическую схему механизма:

Условие замкнутости векторного контура  для любого положения механизма выражается уравнением:
для любого положения механизма выражается уравнением:
Проецируя этот векторный контур на оси координат  и
и  получим функцию положения механизма, т.е. зависимость входной координаты и входной координаты
получим функцию положения механизма, т.е. зависимость входной координаты и входной координаты  :
:
 (5.1)
(5.1)
 (5.2)
(5.2)
Из уравнения (5.2) угловая координата  вектора
вектора  определяется по формуле:
определяется по формуле:
 (5.3)
(5.3)
где 
 (5.4)
(5.4)
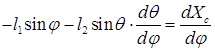
Дифференцируя (5.1) по обобщённой координате получим:
 (5.5)
(5.5)
Дифференцируя (5.2) по получим:
Передаточная функция скорости точки С:
 (5.6)
(5.6)
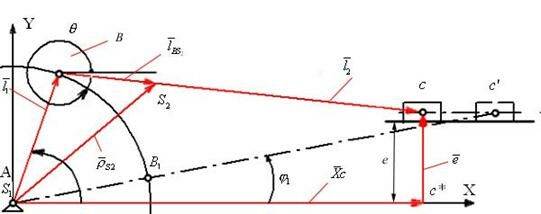
Из векторного контура  определим радиус-вектор центра масс:
определим радиус-вектор центра масс:
Проецируя этот векторный контур на оси координат и , получим координаты центра масс  :
:
 (5.7)
(5.7)
 (5.8)
(5.8)
Дифференцируя (5.7) и (5.8) по получим проекции передаточной функции скорости точки :
 (5.9)
(5.9)
 (5.10)
(5.10)
Дифференцируя по выражение (5.5) получим проекции передаточной функции ускорения звена 2 (шатуна):
 (5.11)
(5.11)
Дифференцируя по выражение (5.6) получим передаточную функцию ускорения точки С:
 (5.12)
(5.12)
Аналогично можно получить кинематические передаточные функции ускорения точки , если продиффиринцировать (5.9) и (5.10) по :
 (5.13)
(5.13)
 (5.14)
(5.14)
где  (5.15)
(5.15)
Для общего случая движения механизма, когда  :
:
Угловое ускорения шатуна:
 (5.16)
(5.16)
Ускорение ползуна:
 (5.17)
(5.17)
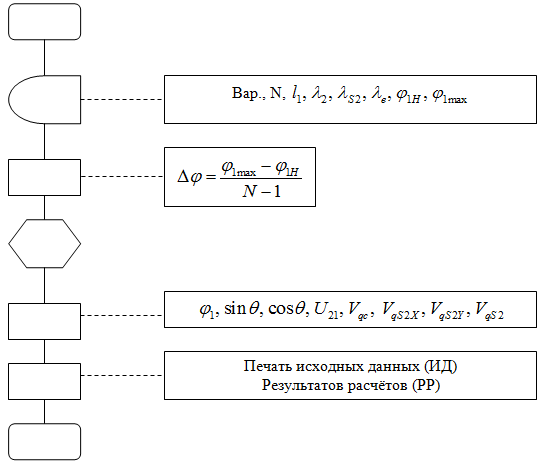
Блок-схема программы определения кинематических передаточных функций скорости кривошипно-ползунного механизма (AR210):
Метод планов положений, скоростей и ускорений
Кинематические характеристики кривошипно-ползунного (и любого другого) механизма могут быть определены и с помощью графоаналитического метода или как его чаще называют метода планов наложений скоростей и ускорений.
Планом механизма называется масштабное графическое изображение кинематической схемы механизма соответствующее заданному положению входного звена.
Планом скоростей механизма называется чертёж, на котором изображены в виде отрезков векторы, равные по модулю и направлению скоростям различных точек механизма в данный момент.
Чертёж, на котором изображены в виде отрезков векторы, равные по модулю и направлению ускорениям различных точек звеньев механизма в данный момент, называют планом ускорений механизма.
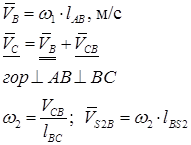
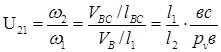
Для иллюстрации этого метода постоим план скоростей (рис. 5.4) для той же угловой координаты . Если угловая скорость  задана, то строим план скоростей в масштабе
задана, то строим план скоростей в масштабе  , Если же неизвестна, то строим план возможных скоростей.
, Если же неизвестна, то строим план возможных скоростей.
 Определение скоростей.
Определение скоростей.
Векторные уравнения для определения скоростей точек В, С и S2:

 Определение ускорений
Определение ускорений
Для определения ускорений точек В и С записываем уравнения в следующем виде:
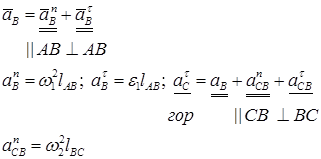
 Далее строим план ускорений (рис. 5.5) в масштабе
Далее строим план ускорений (рис. 5.5) в масштабе  . Угловое ускорение шатуна (звена 2) определяем по формуле:
. Угловое ускорение шатуна (звена 2) определяем по формуле:
 .
.
Экспериментальный метод.
При экспериментальном методе исследования механизмов кинематические характеристики точек и звеньев механизма регистрируются с помощью датчиков. Датчики регистрируют, и потом и преобразуют кинематические параметры в пропорциональные электрические сигналы, которые после усиления регистрируются различными приборами. В последние годы для регистрации и обработки результатов экспериментальных исследований широко используются ПЭВМ. На рис 5.6 показана экспериментальная установка для исследования кинематических характеристик кривошипно-кулисного механизма пресс-автомата.
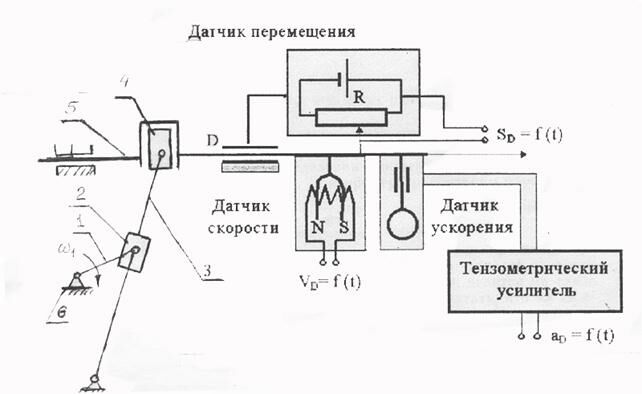
В этой экспериментальной установке:
· Для измерения перемещения выходного звена используется потенциометрический датчик перемещения, в котором пропорционально положению движка потенциометра изменяется его сопротивление.
· для измерения скорости выходного звена используется идукционный датчик скорости, в котором напряжение на концах катушки движущейся в поле постоянного магнита пропорционально скорости катушки;
· для измерения ускорения выходного звена используется тензометрическиий акселерометр Он состоит из пластинчатой пружины один конец которой закреплен на выходном звене механизма, а на втором закреплена масса. На пластину наклеены проволочные тензопреобразователи При движении выходного звена с ускорением инерционность массы вызывает изгиб пластины, деформацию тензопреобразователей и изменение их сопротивления пропорциональное ускорению выходного звена.
Метод кинематических диаграмм.
Графическое и численное интегрирование.
Этот метод применяется в тех случаях, когда функцию нельзя проинтегрировать в аналитической форме. Численное интегрирование ведётся по квадратурным формулам Ньютона-Котеса, формулам Гаусса.
При заданных значениях функций  для n+1 равноотстоящих значений аргумента
для n+1 равноотстоящих значений аргумента  квадратурные формулы Ньютона-Котеса имеют вид:
квадратурные формулы Ньютона-Котеса имеют вид:
правило трапеций для n шагов

правило трапеций для n=1
правило Симпсона для n=2
правило Уэддля для n=6

При вычислениях на ЭВМ используют программы, имеющиеся в каталоге конкретной машины (например, QTFG или QSF).
При графическом определении интеграла подынтегральная функция задается графиком. Для примера рассмотрим определение угла поворота выходного звена по заданной кривой
выходного звена по заданной кривой  , полученной экспериментально.
, полученной экспериментально.
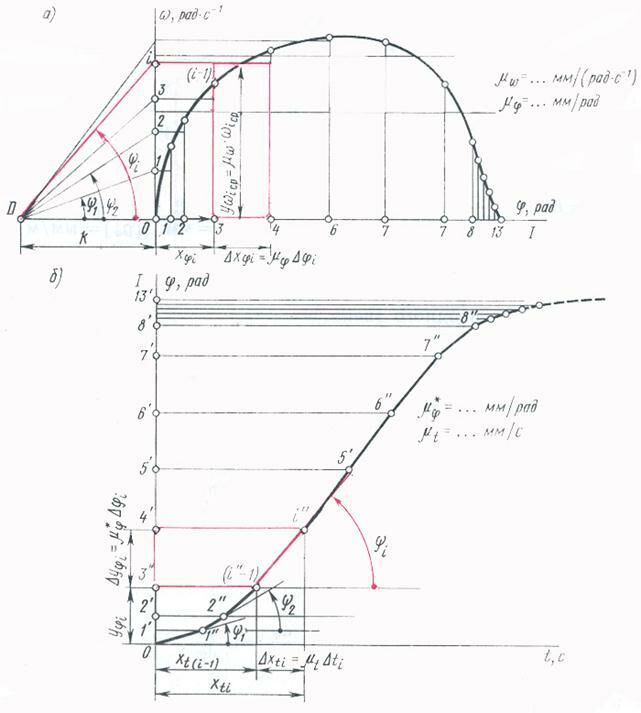
График угловой скорости изображается в декартовых координатах с учетом числовых значений масштабов: угловой скорости  и времени
и времени  . Промежуток времени от
. Промежуток времени от  до
до  , делится на такое количество интервалов
, делится на такое количество интервалов  , которое позволяет считать, что на каждом малом промежутке времени движение можно принять равномерным.
, которое позволяет считать, что на каждом малом промежутке времени движение можно принять равномерным.
Эти промежутки времени, отмеченные на рис. 5.7 , а точками 0, 1, 2, 3, 4, не обязательно должны быть равными.
В каждом интервале времени, например от  до можно приближенно считать, что
до можно приближенно считать, что
т. е. можно принять, что площадь криволинейной трапеции равновелика площади прямоугольника высотой  и основанием
и основанием  .
.
Концы средних ординат для каждого интервала  проецируют на ось ординат и соединяют найденные точки 1', 2', 3' , ... , i' с точкой D, которая ограничивает слева выбранный отрезок интегрирования OD длиной К, мм (рис. 5.7, a).
проецируют на ось ординат и соединяют найденные точки 1', 2', 3' , ... , i' с точкой D, которая ограничивает слева выбранный отрезок интегрирования OD длиной К, мм (рис. 5.7, a).
Лучи D1', D2', D3', ... , проведенные через точку D, образуют углы D1’,  с положительным направлением оси х, причем
с положительным направлением оси х, причем  .
.
На искомом графике  (рис. 5.7, б) проводят линии 01", 1"2" , 2"3" , ... , параллельные в пределах соответствующих интервалов лучам Dl', D2' , D3', ... . Первый отрезок 01" проводят через начало координат 0, следующие отрезки соответственно через точку 1", затем через точку 2" и т. д. Эти линии наклонены относительно положительного направления оси х под углами
(рис. 5.7, б) проводят линии 01", 1"2" , 2"3" , ... , параллельные в пределах соответствующих интервалов лучам Dl', D2' , D3', ... . Первый отрезок 01" проводят через начало координат 0, следующие отрезки соответственно через точку 1", затем через точку 2" и т. д. Эти линии наклонены относительно положительного направления оси х под углами  соответственно, т. е.
соответственно, т. е. 
Отрезки на графиках связаны с соответствующими физическими параметрами с помощью масштабов соотношениями:


 |
Приравнивая правые части написанных выше соотношений для тангенса угла
 получаем:
получаем: 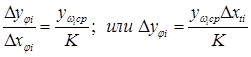
Откуда масштаб искомого графика:
 (5.18)
(5.18)
Графическое и численное дифференцирование.
Графическое дифференцирование начинают с построения графика функции по заданным значениям. При экспериментальном исследовании такой график получают с помощью самопишущих приборов. Далее проводят касательные к кривой в фиксированных положениях и вычисляют значения производной по тангенсу угла, образованного касательной с осью абсцисс.
На рис. 5.8, а изображена кривая  полученная экспериментально на установке (рис. 5.6). Определение углового ускорения (искомой функции) проводят графическим дифференцированием по соотношению:
полученная экспериментально на установке (рис. 5.6). Определение углового ускорения (искомой функции) проводят графическим дифференцированием по соотношению:
 (5.19)
(5.19)
Тангенс угла  наклона касательной к кривой
наклона касательной к кривой  в некоторой точке i представляют в виде отношения отрезков
в некоторой точке i представляют в виде отношения отрезков  , где К – выбранный отрезок интегрирования (рис. 5.8, б)
, где К – выбранный отрезок интегрирования (рис. 5.8, б)
После подстановки этого соотношения в соотношение (5.19) получают
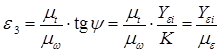
где  - ордината искового графика углового ускорения;
- ордината искового графика углового ускорения;

— масштаб искомого графика  ; единицы СИ:[] = мм; [
; единицы СИ:[] = мм; [ ] = мм/(рад
] = мм/(рад с-2).
с-2).
График функции  строят по найденным значениям ординат для ряда позиций. Точки на кривой соединяют от руки плавной линией, а затем обводят с помощью лекала.
строят по найденным значениям ординат для ряда позиций. Точки на кривой соединяют от руки плавной линией, а затем обводят с помощью лекала.
Графическое дифференцирование рассмотренным методом касательных имеет относительно низкую точность. Более высокую точность получают при графическом дифференцировании методом хорд (рис. 5.8, в и г).
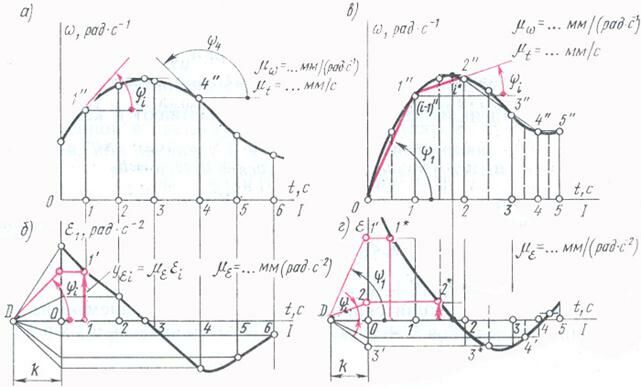 |
На заданной кривой отмечают ряд точек 1", 2", 3", которые соединяют хордами, т.е. заменяют заданную кривую ломаной линией. Принимают следующее, допущение: угол наклона касательных в точках, расположенных посередине каждого участка кривой, равен углу
наклона соответствующей хорды. Это допущение вносит некоторую погрешность, но она относится только к данной точке. Эти погрешности не суммируются, что обеспечивает приемлемую точность метода. Рис (5.8)
Остальные построения аналогичны ранее описанным при графическом дифференцировании методом касательных. Выбирают отрезок  (мм); проводят лучи, наклоненные под углами
(мм); проводят лучи, наклоненные под углами  до пересечения с осью ординат в точках 1', 2', 3' ... , которые переносят на ординаты, проведенные в середине каждого из интервалов. Полученные точки 1*, 2*, 3* являются точками искомой функции
до пересечения с осью ординат в точках 1', 2', 3' ... , которые переносят на ординаты, проведенные в середине каждого из интервалов. Полученные точки 1*, 2*, 3* являются точками искомой функции  .
.
Масштабы по осям координат при этом методе построения связаны таким же соотношением (5.21), которое было выведено для случая графического дифференцирования методом касательных.
Дифференцирование функции f(x), заданной (либо вычисленной) в виде массива чисел, выполняют методом численного дифференцирования с применением ЭВМ.
Чем меньше шаг  в массиве чисел, тем точнее можно вычислить значение производной функции в этом интервале
в массиве чисел, тем точнее можно вычислить значение производной функции в этом интервале
Можно пользоваться также выражением

При численном дифференцировании используют интерполяционные формулы, которые сопоставляют заданные значения какой-либо величины с функцией известного .класса, зависящей от нескольких параметров, выбранную так, чтобы при заданных значениях аргумента (в узлах интерполяции) значения функции совпадали с заданными значениями величины, т. е. чтобы график функции проходил через заданные точки. Численное дифференцирование чувствительно к ошибкам, вызванным неточностью исходных данных. Для функции у(х), заданной таблицей разностей для равноотстоящих значений аргумента с шагом , используют следующие соотношения для вычисления аргумента и производных:



При разработке прикладных программ для численного дифференцирования на ЭВМ используют интерполяционные формулы Стирлинга, Бесселя, Ньютона и др.
Метод преобразования координат.
Применение ЭВМ для кинематического анализа механизмов связано с разработкой соответствующих алгоритмов и программ расчёта. Наиболее просто такие алгоритмы реализуются с использованием уравнений преобразования координат в матричной форме записи необходимых операций вычисления.
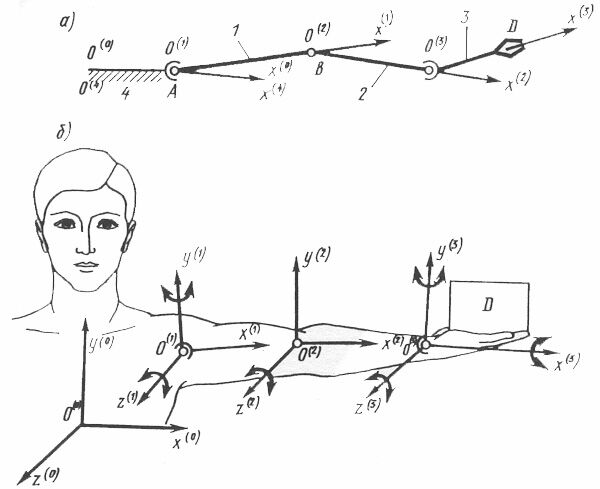
При этом методе выбирают некоторое число систем координат, достаточное для математического описания геометрической формы звеньев и относительного движения звеньев в каждой кинематической паре. Число систем координат определяется числом элементов звеньев, образующих кинематические пары. Неподвижная система координат  связана со стойкой. В каждой кинематической паре выбирают две системы координат (способ 1) или одну систему координат (способ 2). При 1-м способе две системы координат относятся к элементам пары звеньев, образующих эту пару. При втором способе каждой кинематической паре соответствует прямоугольная система координат, одна из осей которой связана с характерными признаками звена, например осевой линией. Для примера на рис. 5.9, а показаны координатные оси
связана со стойкой. В каждой кинематической паре выбирают две системы координат (способ 1) или одну систему координат (способ 2). При 1-м способе две системы координат относятся к элементам пары звеньев, образующих эту пару. При втором способе каждой кинематической паре соответствует прямоугольная система координат, одна из осей которой связана с характерными признаками звена, например осевой линией. Для примера на рис. 5.9, а показаны координатные оси  (или
(или  ) четырехзвенной открытой кинематической цепи из звеньев 1, 2, 3, 4, моделирующей структуру руки человека (рис. 5.9, б). Ось
) четырехзвенной открытой кинематической цепи из звеньев 1, 2, 3, 4, моделирующей структуру руки человека (рис. 5.9, б). Ось  направляют вдоль оси пары, а ось
направляют вдоль оси пары, а ось  дополняет правую систему координат
дополняет правую систему координат  .
.
Начало координат каждой i-й локальной координатной системы совмещают с той кинематической парой, которой данное звено соединено с предыдущим звеном. Для плоских механизмов оси  параллельны между собой, так как они перпендикулярны базовой плоскости, в которой рассматривается движение звеньев плоского механизма.
параллельны между собой, так как они перпендикулярны базовой плоскости, в которой рассматривается движение звеньев плоского механизма.

 |
Переход от i-й локальной координатной системы к другой (i+1) системе определяется уравнениями преобразования декартовых прямоугольных координат, в общем случае – переноса и поворота координатных осей.
Применение метода будет продемонстрированною на конкретном примере в лекции 25 «Манипуляторные роботы».
Лекция "Опросный лист" также может быть Вам полезна.
Контрольные вопросы к лекции N5:
1. Как построить графически функцию положения механизма и её производные?
2. Как рассчитать масштабы кинематических диаграмм?
3. Как определить величину и направление угловых скоростей и угловых ускорений звеньев?
4. Как аналитически определить функцию положения, передаточные функции скорости и ускорения ползуна кривошипного механизма?
5. В чём заключается преимущества и недостатки аналитического и графического методов кинематического анализа?



















