
Электрические и регулировочные свойства двигателей последовательного и смешанного возбуждения
Модуль 3. Электрические и регулировочные свойства двигателей последовательного и смешанного возбуждения
Двигатели последовательного возбуждения широко используются в металлургическом электроприводе, для крановых механизмов, на транспорте и др. Эти двигатели удовлетворительно работают при больших снижениях напряжения (например, при троллейном питании). Они обладают повышенной надежностью из–за повышенного сечения обмотки возбуждения. Эти двигатели, кроме того, развивают большие моменты при одинаковых перегрузках по току. Они широко используются в электротяге, трамваях и др.
Промышленностью выпускается большое количество таких двигателей серий, мощностью 2,5¸185кВт;  металлургические двигатели серий ДС, ДП и др.
металлургические двигатели серий ДС, ДП и др.
3.1 Схема включения, статические характеристики и режимы работы двигателя последовательного возбуждения
3.1.1 Схема включения двигателя последовательного возбуждения
Схема включения ДПТ последовательного возбуждения представлена на рис. 3.1.
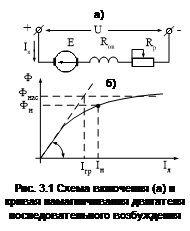
 Основной особенностью двигателя последовательного возбуждения является включение его обмотки возбуждения (ОВ) последовательно с обмоткой якоря. Поэтому магнитный поток Ф зависит от тока якоря
Основной особенностью двигателя последовательного возбуждения является включение его обмотки возбуждения (ОВ) последовательно с обмоткой якоря. Поэтому магнитный поток Ф зависит от тока якоря  (кривая намагничивания 1, рис. 3.1,б). Для ненасыщенной машины:
(кривая намагничивания 1, рис. 3.1,б). Для ненасыщенной машины:
 , Вб, (3.1)
, Вб, (3.1)
где  - коэффициент пропорциональности, Ом×С.
- коэффициент пропорциональности, Ом×С.
Рекомендуемые материалы
Магнитная цепь двигателя при номинальном токе  насыщена. Поэтому для анализа работы двигателя используют аппроксимацию кривой намагничивания (ломаная кривая 2).
насыщена. Поэтому для анализа работы двигателя используют аппроксимацию кривой намагничивания (ломаная кривая 2).
При 


 .
.
3.1.2 Статические характеристики двигателя последовательного возбуждения в двигательном режиме
Для получения статических характеристик используются те же допущения, а также исходные уравнения, что и для двигателя независимого возбуждения и те же исходные уравнения (2.1).
Из этих уравнений может быть получено уравнение электромеханической характеристики  ,
,
 , (3.2)
, (3.2)
где  - суммарное сопротивление цепи якоря двигателя.
- суммарное сопротивление цепи якоря двигателя.
 и
и 
Следовательно, характеристика представляет собой гиперболическую зависимость (при  , т. е. при
, т. е. при  ).
).
Уравнение механической характеристики  с учетом того, что
с учетом того, что  , будет иметь вид:
, будет иметь вид:
 (3.3)
(3.3)
или
 , (3.4)
, (3.4)
где  .
.
Анализ формул (3.2) и (3.3) показывает, что асимптотами электромеханической и механической характеристик будут следующие прямые.
При  и
и  скорость принимает бесконечно большое значение
скорость принимает бесконечно большое значение  ¥. Это означает, что ось скорости является первой асимптотой характеристик.
¥. Это означает, что ось скорости является первой асимптотой характеристик.
При  и
и  скорость
скорость  , т.е. прямая с координатой
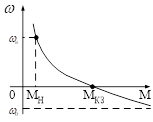
, т.е. прямая с координатой  является второй горизонтальной асимптотой характеристик. Зависимости
является второй горизонтальной асимптотой характеристик. Зависимости  и
и  будут иметь гиперболический характер (рис. 3.2).
будут иметь гиперболический характер (рис. 3.2).


При малых нагрузках на двигатель ( и
и  ) механическая естественная характеристика будет иметь вид, представленный на рис. 3.3.
) механическая естественная характеристика будет иметь вид, представленный на рис. 3.3.
 При
При  магнитный поток
магнитный поток  , поэтому уравнения механической и электромеханической характеристик будут иметь вид:
, поэтому уравнения механической и электромеханической характеристик будут иметь вид:
 , (3.5)
, (3.5)
 . (3.6)
. (3.6)
Следовательно, при насыщении магнитной системы характеристики  и
и  из гиперболических становятся близкими к прямолинейным. В области нагрузок, меньших номинальных, характеристики будут гиперболическими.
из гиперболических становятся близкими к прямолинейным. В области нагрузок, меньших номинальных, характеристики будут гиперболическими.
При токе якоря  и моменте М, стремящимися к нулю, характеристики будут асимптотически приближаться к оси ординат. Эта форма характеристики определяется условиями электрического равновесия машины: при идеальном холостом ходе (
и моменте М, стремящимися к нулю, характеристики будут асимптотически приближаться к оси ординат. Эта форма характеристики определяется условиями электрического равновесия машины: при идеальном холостом ходе ( ),
),  должна уравновешивать приложенное к якорной цепи напряжение
должна уравновешивать приложенное к якорной цепи напряжение  . Но при этом и поток приближается к нулю и выполнения условия
. Но при этом и поток приближается к нулю и выполнения условия
 (3.7)
(3.7)
возможно только при неограниченном возрастании скорости.
В действительности же даже при идеальном холостом ходе скорость  будет конечной, т. к. при
будет конечной, т. к. при  в машине будет присутствовать
в машине будет присутствовать  . Действительно, при холостом ходе имеют место механические потери, которые обусловлены трением щёток о коллектор, трением в подшипниках, а также о воздух. Кроме того, всегда имеется небольшой магнитный поток остаточного намагничивания. Наличие
. Действительно, при холостом ходе имеют место механические потери, которые обусловлены трением щёток о коллектор, трением в подшипниках, а также о воздух. Кроме того, всегда имеется небольшой магнитный поток остаточного намагничивания. Наличие  будет определять конечную скорость идеального холостого хода
будет определять конечную скорость идеального холостого хода
 . (3.8)
. (3.8)
Обычно  , поэтому скорость
, поэтому скорость  может в десятки раз превышает скорость
может в десятки раз превышает скорость  . Такое превышение скорости недопустимо по условиям прочности коллектора и бандажей, крепящих обмотку якоря. Для отечественных двигателей
. Такое превышение скорости недопустимо по условиям прочности коллектора и бандажей, крепящих обмотку якоря. Для отечественных двигателей
 .
.
Поэтому двигатель последовательного возбуждения для рабочих машин, имеющих холостой ход или снижение нагрузки до малых значений ( ), применять не следует.
), применять не следует.
При  ,
,  характеристики двигателя будут линейными, как у двигателя независимого возбуждения.
характеристики двигателя будут линейными, как у двигателя независимого возбуждения.
Естественная характеристика показана на рис. 3.3.
 МДС, создаваемая последовательной обмоткой практически устраняет влияние размагничивающего действия реакции якоря и приводит в области допустимой перегрузки к возрастанию потока сверх номинального значения на 10-15 %.
МДС, создаваемая последовательной обмоткой практически устраняет влияние размагничивающего действия реакции якоря и приводит в области допустимой перегрузки к возрастанию потока сверх номинального значения на 10-15 %.
Интересной является моментная характеристика двигателя

для ненасыщенной машины ( )
)
В лекции "8 Аналитические методы в системе контроля источников загрязнения и объектов окружающей среды" также много полезной информации.
 . (3.9)
. (3.9)
Поэтому по сравнению с двигателем независимого возбуждения он имеет значительно большую перегрузочную способность двигателя по моменту:
 ,
,
 и более.
и более.
Область применения двигателей последовательного возбуждения связана с формой естественной, механической и моментной характеристик.
При  квадратичная зависимость
квадратичная зависимость  не сохраняется, однако значение момента М пропорционально току
не сохраняется, однако значение момента М пропорционально току  в степени 1,2¸1,4, что является ценным качеством этих двигателей при пусках и перегрузках.
в степени 1,2¸1,4, что является ценным качеством этих двигателей при пусках и перегрузках.
Рекомендуемые лекции
- Особенности функционирование сферы услуг
- Персонал как объект управления
- 1 Линии передачи свч и их технические характеристики
- 8 Аналитические методы в системе контроля источников загрязнения и объектов окружающей среды
- 14 Система и компетенция органов, осуществляющих государственное регулирование и управление в сельском хозяйстве


















