
Лекция 12
Лекция 12.
План:
1. Введение;
2. Элементарная теория гироскопа.
§5.12.1. Введение.
Гироскопические приборы и системы широко используются в различных областях техники: в авиации, на ракетах и судах для целей навигации и автоматического управления движением; в артиллерии для стабилизации орудий и прицелов (установленных на подвижные объекты) на выбранном направлении; в горнорудной и нефтяной промышленности для определения азимута и угла наклона к плоскости горизонта прокладываемых шахт, тоннелей и нефтяных скважин; в геологии и картографии для стабилизации в плоскости горизонта геофизической аппаратуры (гравиметров, магнитометров и т.д.) и аэрофотоаппаратов. С начала развития космической техники гироскопические устройства успешно применяются в системах стабилизации и управления искусственных спутников и космических летательных аппаратов.
С помощью гироскопических приборов и систем автономно, т.е. без связи с внешней средой, определяются направление плоскости меридиана, истинной вертикали и широта места, измеряются углы, угловые и линейные скорости, угловые ускорения подвижных объектов.
Основным элементом гироскопических приборов и систем является гироскоп.
Слово "гироскоп" буквально означает "указатель вращения". Так был назван прибор для демонстрации суточного вращения Земли, построенный французским физиком Л.Фуко в 1852 г. Основной частью прибора Л.Фуко был быстровращающийся ротор (маховик), установленный в корпусе так, что ось его вращения могла свободно поворачиваться вокруг неподвижной точки. Таким образом, гироскоп представляет собой симметричный однородный маховик, быстро вращающийся вокруг оси динамической симметрии, которая может как угодно поворачиваться в пространстве. Это определение обычного (классического) гироскопа, который пока наиболее широко применяется в современной технике.
Рекомендуемые материалы
Однако к настоящему времени наукой выявлены десятки различных физических явлений и принципов, которые могут быть использованы для автономного обнаружения и измерения вращения тел в пространстве, т.е. могут решать ту же задачу, что и прибор Л.Фуко. Поэтому гироскопом называют всякое устройство, основанное на любом явлении, которое может быть использовано для автономного обнаружения и измерения вращения объекта в неподвижном пространстве. Начиная с 60-х годов текущего века наряду с обычными (классическими) гироскопами находят применение гироскопы, построенные на иных конструктивных и физических принципах. К таким приборам относятся прежде всего вибрационные, гидродинамические, лазерные и волоконно-оптические гироскопы.
§5.12.2. Элементарная теория гироскопа
Пусть си мметричный маховик (однородное тело вращения), имеющий неподвижную точку  (рис.1), совпадающую с центром масс, вращается c абсолютной угловой скоростью
(рис.1), совпадающую с центром масс, вращается c абсолютной угловой скоростью  . С осью динамической симметрии маховика жёстко свяжем ось
. С осью динамической симметрии маховика жёстко свяжем ось  ортогональной системы координат
ортогональной системы координат  , начало которой совместим с неподвижной точкой .
, начало которой совместим с неподвижной точкой .
Координатные оси  и
и 
|
|
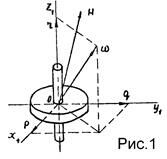
расположены в экваториальной плоскости маховика и не участвуют во вращении последнего вокруг оси симметрии.
Проекции угловой скорости маховика на оси ,,, являющиеся главными центральными осями инерции, обозначим соответственно  ,
,  ,
,  . Если
. Если  - момент инерции маховика относительно экваториальной оси, а С - момент инерции относительно оси динамической симметрии, то проекции вектора главного момента количества движения Н на оси ,,
- момент инерции маховика относительно экваториальной оси, а С - момент инерции относительно оси динамической симметрии, то проекции вектора главного момента количества движения Н на оси ,,
 ;
;  ;
;  .
.
Обычно С>А.
Вектор Н главного момента количества движения можно представить в виде
 .
.
Модуль вектора главного момента количества движения
 ,
,
где  -модули проекций главного момента количества движения маховика. Таким образом, можно назвать три непараллельных направления: направление оси симметрии маховика, по которой направлена проекция угловой скорости , направление абсолютной угловой скорости и направление вектора момента количества движения
-модули проекций главного момента количества движения маховика. Таким образом, можно назвать три непараллельных направления: направление оси симметрии маховика, по которой направлена проекция угловой скорости , направление абсолютной угловой скорости и направление вектора момента количества движения  маховика.
маховика.
Если угловая скорость вокруг оси динамической симметрии маховика велика и значительно превышает угловые скорости и . Относительно экваториальных осей, то рассматриваемый маховик является гироскопом.
Для современных гироскопов угловая скорость маховика относительно оси динамической симметрии составляет тысячи радианов в секунду, а угловые скорости относительно экваториальных осей обычно не превышают долей радиана в секунду. Учитывая это, в элементарной теории гироскопа вектор главного момента количества движения тела относительно неподвижной точки принимают равным
 (5.1)
(5.1)
т.е. полагают, что главный момент количества движения, который в дальнейшем будем называть кинетическим моментом, направлен по оси динамической симметрии гироскопа. Соотношение (5.1) будет тем более точным, чем больше и .
Для изучения движения гироскопа воспользуемся теоремой об изменении момента количества движения, согласно которой справедливо равенство
 , (5.2)
, (5.2)
где  - момент всех внешних сил относительно неподвижной точки (главный момент).
- момент всех внешних сил относительно неподвижной точки (главный момент).
Вспомним, что производная от вектора по времени представляет собой "скорость"  конца этого вектора,
конца этого вектора,  , следовательно, равенство (5.2) можно зависать в виде
, следовательно, равенство (5.2) можно зависать в виде
 . (5.3)
. (5.3)
Полученное равенство представляет собой теорему Резаля: скорость конца вектора кинетического момента равна главному моменту внешних сил.
Согласно равенству (5.1) вектор Н кинетического момента направлен по оси - оси гироскопа. Это означает, что c помощью зависимостей (5.2) и (5.3) можно исследовать движение оси гироскопа.
Рассмотрим основные свойства гироскопа:
1. Пусть момент внешних сил относительно неподвижной точки равен нулю,  . Тогда согласно теореме об изменении момента количества движения (5.2)
. Тогда согласно теореме об изменении момента количества движения (5.2)  . Следовательно, если на трёхстепенной гироскоп не действуют моменты внешних сил, то ось гироскопа сохраняет неизменным своё направление в пространстве.
. Следовательно, если на трёхстепенной гироскоп не действуют моменты внешних сил, то ось гироскопа сохраняет неизменным своё направление в пространстве.
2. Если на гироскоп подействовать кратковременной силой (удар), то благодаря тому, что скорость конца вектора не будет равна нулю лишь в течение весьма короткого промежутка времени действия силы, ось гироскопа практически не изменит своего положения. Таким образом, ось гироскопа сохраняет положение в пространстве устойчиво. В действительности, после действия удара ось гироскопа совершает колебания с большой частотой и весьма малой амплитудой (нутационные колебания), но в элементарной теории гироскопа этими колебаниями пренебрегают.
3. Момент внешних сил относительно неподвижной точки постоянен:  . Приложим к гироскопу силу
. Приложим к гироскопу силу  на расстоянии
на расстоянии  от точки подвеса как показано на рис.2.
от точки подвеса как показано на рис.2.

Согласно теореме Резаля конец вектора приобретает скорость . В результате ось гироскопа начнёт движение в направлении момента , т.е. перпендикулярно к линии действия приложенной силы. По прекращении действия момента внешних сил ось гироскопа мгновенно останавливается. Такое движение оси гироскопа называют прецессией, а угловую скорость оси – угловой скоростью прецессии. Прецессионное движение гироскопа является движением без инерции. Найдём модуль угловой скорости прецессии  . Согласно формуле
. Согласно формуле  , применяемой для вычисление скорости точки твердого тела (- угловая скорость твердого тела; - расстояние от рассматриваемой точки твёрдого тела до неподвижной точки) скорость U конца вектора H определяем по формуле
, применяемой для вычисление скорости точки твердого тела (- угловая скорость твердого тела; - расстояние от рассматриваемой точки твёрдого тела до неподвижной точки) скорость U конца вектора H определяем по формуле

или, учитывая равенство (5.3), - по формуле
 (5.4)
(5.4)
Отсюда
 , (5.5)
, (5.5)
где  - угол между осью гироскопа
- угол между осью гироскопа  (вектором ) и угловой скоростью прецессии . На рис.2 угол
(вектором ) и угловой скоростью прецессии . На рис.2 угол  , но в общем случае он может быть отличен от прямого.
, но в общем случае он может быть отличен от прямого.
Следовательно при действии на гироскоп момента внешних сил ось гироскопа вращается (прецессирует) с угловой скорость, определяемой равенством (5.5) таким образом, как если бы вектор Н стремился совместиться с вектором момента , перемещаясь по кратчайшему пути. Это свойство гироскопа называют законом прецессии оси гироскопа.
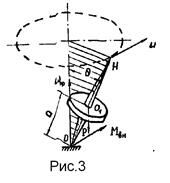
Применим закон прецессии к анализу движения гироскопа (волчка) под действием силы тяжести. На волчок действуют две внешние силы: сила тяжести и реакция опоры (рис.3).
|
|
Рекомендуем посмотреть лекцию "Влияние условий выращивания на накопление".
Момент реакции относительно точки равен нулю, а модуль момента силы тяжести относительно точки определяется по равенству
 , (5.6)
, (5.6)
где а - расстояние от точки 0 до центра масс волчка; - угол между осью волчка и вертикалью.
Так как вектор момента всегда перпендикулярен к вертикальной плоскости проходящей через ось волчка, то вектор скорости конца вектора горизонтален. Следовательно, ось волчка описывает вокруг вертикали поверхность круглого конуса.
Угловая скорость прецессии согласно формуле (5.5) с учётом равенства (5.6)



















