Лабораторная работа 2: Лабораторная работа №2 (вариант 5) вариант 5
Описание
Краткое описание выполненной работы:
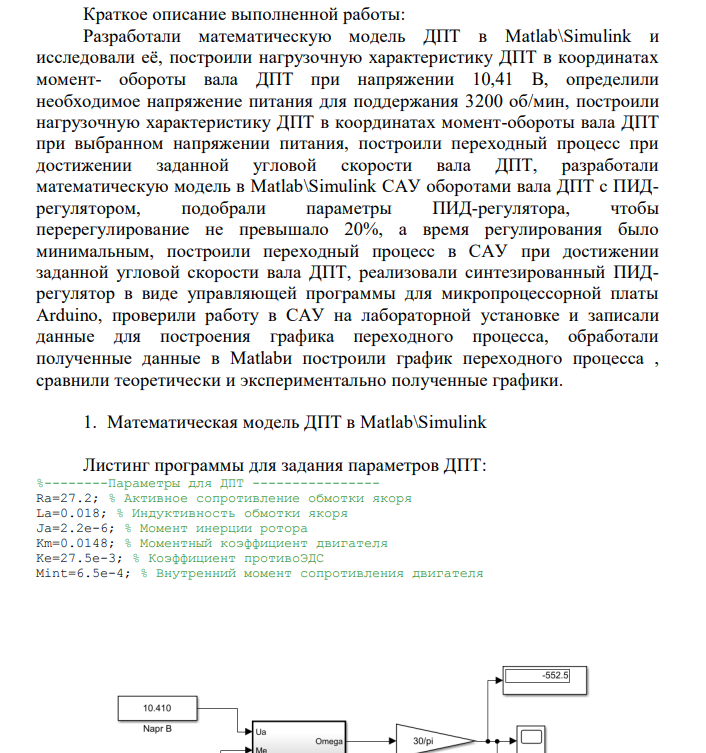
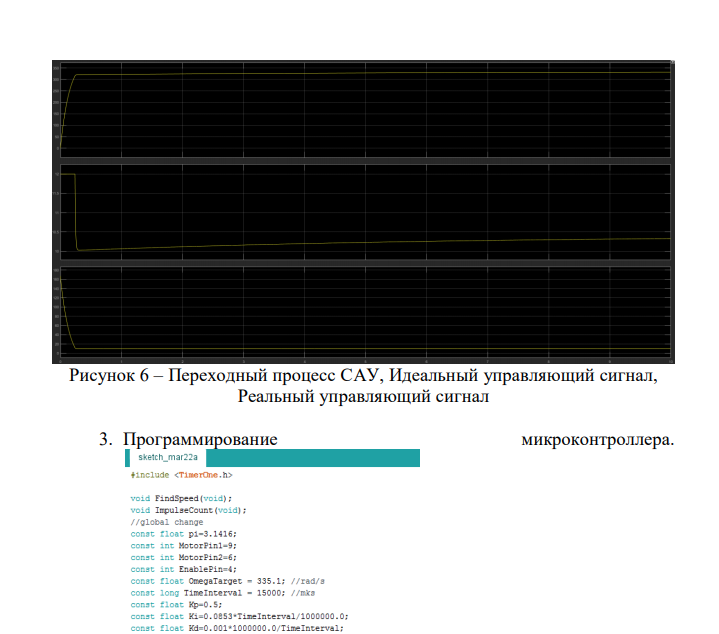
Разработали математическую модель ДПТ в MatlabSimulink и исследовали её, построили нагрузочную характеристику ДПТ в координатах момент- обороты вала ДПТ при напряжении 10,41 В, определили необходимое напряжение питания для поддержания 3200 об/мин, построили нагрузочную характеристику ДПТ в координатах момент-обороты вала ДПТ при выбранном напряжении питания, построили переходный процесс при достижении заданной угловой скорости вала ДПТ, разработали математическую модель в MatlabSimulink САУ оборотами вала ДПТ с ПИДрегулятором, подобрали параметры ПИД-регулятора, чтобы перерегулирование не превышало 20%, а время регулирования было минимальным, построили переходный процесс в САУ при достижении заданной угловой скорости вала ДПТ, реализовали синтезированный ПИДрегулятор в виде управляющей программы для микропроцессорной платы Arduino, проверили работу в САУ на лабораторной установке и записали данные для построения графика переходного процесса, обработали полученные данные в Matlabи построили график переходного процесса , сравнили теоретически и экспериментально полученные графики.
![]()
![]()
Разработали математическую модель ДПТ в MatlabSimulink и исследовали её, построили нагрузочную характеристику ДПТ в координатах момент- обороты вала ДПТ при напряжении 10,41 В, определили необходимое напряжение питания для поддержания 3200 об/мин, построили нагрузочную характеристику ДПТ в координатах момент-обороты вала ДПТ при выбранном напряжении питания, построили переходный процесс при достижении заданной угловой скорости вала ДПТ, разработали математическую модель в MatlabSimulink САУ оборотами вала ДПТ с ПИДрегулятором, подобрали параметры ПИД-регулятора, чтобы перерегулирование не превышало 20%, а время регулирования было минимальным, построили переходный процесс в САУ при достижении заданной угловой скорости вала ДПТ, реализовали синтезированный ПИДрегулятор в виде управляющей программы для микропроцессорной платы Arduino, проверили работу в САУ на лабораторной установке и записали данные для построения графика переходного процесса, обработали полученные данные в Matlabи построили график переходного процесса , сравнили теоретически и экспериментально полученные графики.
Характеристики лабораторной работы
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаНомер задания
Вариант
Просмотров
31
Размер
747,68 Kb
Список файлов
Лабораторная работа №2 (вариант 5).pdf

Друзья, спасибо за доверие! Если вам понравилась работа – поставьте 5⭐ и напишите отзыв. Это поможет другим студентам, а мне даст силы делать ещё больше качественных материалов для вас 🔥
 anhyeuem
anhyeuem
05 мая 2021 в 01:15
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!
Отзывы на другие работы автора
Отзыв
ДМ1519 - Проектирование привода цепного транспортера с двухступенчатым цилиндрическим редуктором выполненным по развернутой схеме
Есть недочёты, хорошо подходит как база для выполнения аналогичного варианта курсача

Отзыв
Сборочная размерная цепь + Подетальная размерная цепь
Были замечания, но автор все быстро исправил, теперь все отлично.

Отзыв
Плоская и пространственная статика
Есть небольшая путаница с углами из условий, которая может влиять на численный ответ, и подобные мелкие ошибки, в остальном всё хорошо

Отзыв
Кратные и криволинейные интегралы
есть ошибка в 5 номере и преподаватели уже начинают палить что эта работа списана

Отзыв
Отчет по производственной практике - Композиционные материалы - Предприятие НИИ СМ МГТУ им. Н.Э. Баумана
Спасибо! Изложение краткое и конструктивное, лишней информации нет. Помогло при составлении отчета


















