Другое 73: 73В - Проектирование и исследование механизмов управления летательного аппарата с уголковыми соплами вариант В
-61%
Описание
Техническое задание
1.1 Описание работы механизма
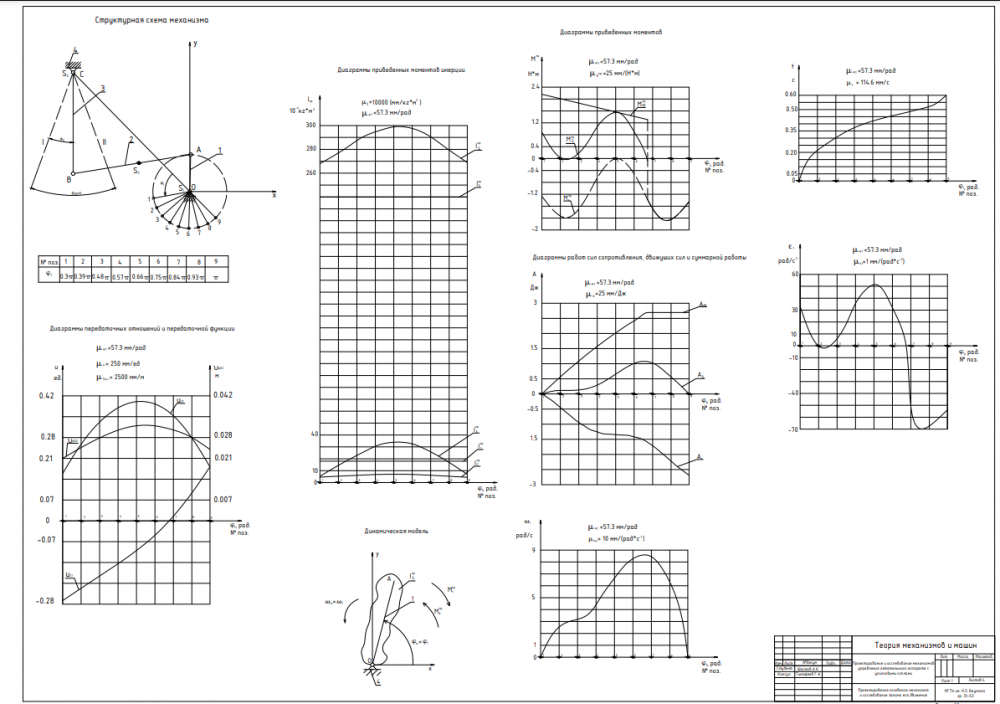
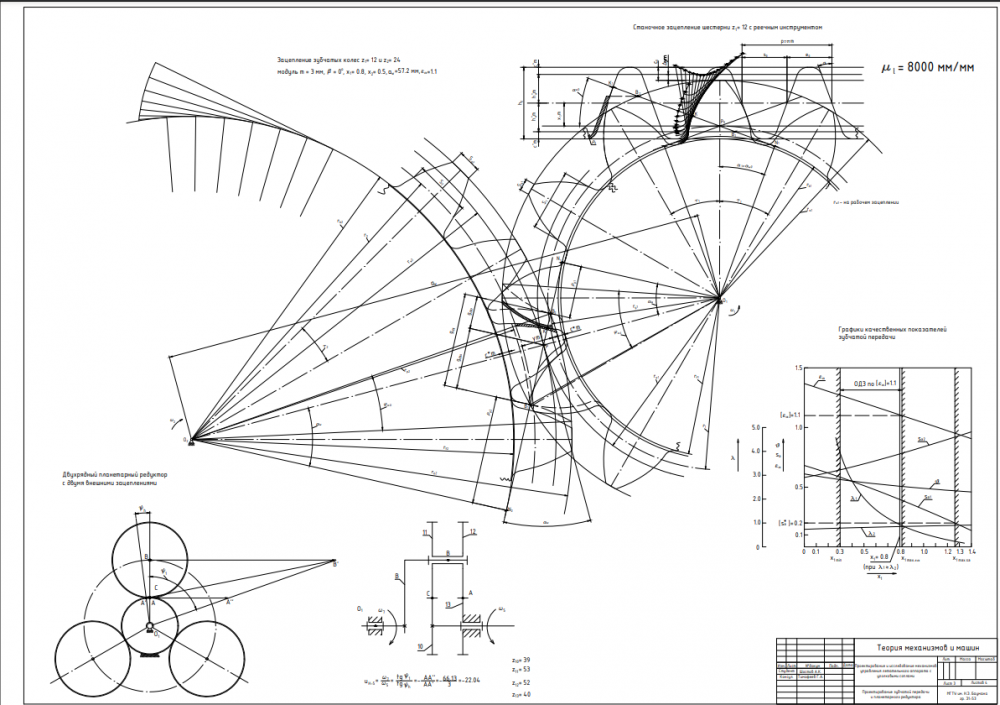
Корректировка траектории полета летательного аппарата производится за счет изменения направления потока газов, выходящих из угловых сопел. Схема расположения уголковых сопел и их привод представлены на рис. а. Поворот подвижной части 3 уголкового сопла относительно неподвижной его части осуществляется с помощью механизмов управления. Направление потока и величина угла поворота каждого из уголковых сопел могут быть различными, благодаря чему траектория полета может значительно меняться. При необходимости изменения траектории полета соответствующий сигнал подается от автомата управления 9 на источник питания 8 (специальные батареи с устройством переключения полярности) электродвигателя 7. В зависимости от включения источника питания вал электродвигателя начинает вращаться в ту или иную сторону. Движение от электродвигателя 7 через планетарный редуктор 6 (схема редуктора изображена на рис. в) и зубчатые колеса 5,4 передается валу O, на котором закреплено звено I стержневого механизма OABC. Звено I, поворачиваясь на некоторый угол вокруг оси O, передает движение через шатун 2 коромыслу 3, которое жестко связано с подвижной частью уголкового сопла. Начальное положение I уголкового сопла характеризуется отклонением звена 3 от нейтрального (вертикального) положения на угол 20° (рис. б). При повороте уголкового сопла из начального положения I в конечное положение II (рис.б) на угол 3раб на звено 3 действует момент сопротивления Mс3 , зависимость которого от угла поворота 3 представлена диаграммой ( Mс3 , 3 ) (рис. г). Данные для построения диаграммы приведены в таблице 2. В начальном положении механизма приведенный к звену 1 момент электродвигателя в 1.7 раз больше приведенного момента сопротивления. Можно принять, что при повороте механизма величина приведенного момента убывает по линейному закону. Электродвигатель должен обеспечить безударный останов уголкового сопла в конечном положении. Выключение электродвигателя производится в тот момент, когда уголковое сопло (звено 3) повернется на угол:
![]()
![]()
![]()
![]()
![]()
![]()
1.1 Описание работы механизма
Корректировка траектории полета летательного аппарата производится за счет изменения направления потока газов, выходящих из угловых сопел. Схема расположения уголковых сопел и их привод представлены на рис. а. Поворот подвижной части 3 уголкового сопла относительно неподвижной его части осуществляется с помощью механизмов управления. Направление потока и величина угла поворота каждого из уголковых сопел могут быть различными, благодаря чему траектория полета может значительно меняться. При необходимости изменения траектории полета соответствующий сигнал подается от автомата управления 9 на источник питания 8 (специальные батареи с устройством переключения полярности) электродвигателя 7. В зависимости от включения источника питания вал электродвигателя начинает вращаться в ту или иную сторону. Движение от электродвигателя 7 через планетарный редуктор 6 (схема редуктора изображена на рис. в) и зубчатые колеса 5,4 передается валу O, на котором закреплено звено I стержневого механизма OABC. Звено I, поворачиваясь на некоторый угол вокруг оси O, передает движение через шатун 2 коромыслу 3, которое жестко связано с подвижной частью уголкового сопла. Начальное положение I уголкового сопла характеризуется отклонением звена 3 от нейтрального (вертикального) положения на угол 20° (рис. б). При повороте уголкового сопла из начального положения I в конечное положение II (рис.б) на угол 3раб на звено 3 действует момент сопротивления Mс3 , зависимость которого от угла поворота 3 представлена диаграммой ( Mс3 , 3 ) (рис. г). Данные для построения диаграммы приведены в таблице 2. В начальном положении механизма приведенный к звену 1 момент электродвигателя в 1.7 раз больше приведенного момента сопротивления. Можно принять, что при повороте механизма величина приведенного момента убывает по линейному закону. Электродвигатель должен обеспечить безударный останов уголкового сопла в конечном положении. Выключение электродвигателя производится в тот момент, когда уголковое сопло (звено 3) повернется на угол:



Файлы условия, демо
Характеристики учебной работы
Тип
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Номер задания
Вариант
Просмотров
247
Размер
2,6 Mb
Список файлов
Проектирование и исследование механизмов управления летательного аппарата с уголковыми соплами
1.PNG
2.PNG
3.PNG
Лист 1.pdf
Лист 2.pdf
Лист 3.pdf
Лист 4.pdf
РПЗ.pdf

Друзья, спасибо за доверие! Если вам понравилась работа – поставьте 5⭐ и напишите отзыв. Это поможет другим студентам, а мне даст силы делать ещё больше качественных материалов для вас 🔥
 anhyeuem
anhyeuem
12 мая 2021 в 19:06
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!
Отзывы на другие работы автора
Отзыв
ДМ1519 - Проектирование привода цепного транспортера с двухступенчатым цилиндрическим редуктором выполненным по развернутой схеме
Есть недочёты, хорошо подходит как база для выполнения аналогичного варианта курсача

Отзыв
Сборочная размерная цепь + Подетальная размерная цепь
Были замечания, но автор все быстро исправил, теперь все отлично.

Отзыв
Плоская и пространственная статика
Есть небольшая путаница с углами из условий, которая может влиять на численный ответ, и подобные мелкие ошибки, в остальном всё хорошо

Отзыв
Кратные и криволинейные интегралы
есть ошибка в 5 номере и преподаватели уже начинают палить что эта работа списана

Отзыв
Отчет по производственной практике - Композиционные материалы - Предприятие НИИ СМ МГТУ им. Н.Э. Баумана
Спасибо! Изложение краткое и конструктивное, лишней информации нет. Помогло при составлении отчета



















