Курсовая работа 50: Проектирование и исследование механизмов гидроподъёмника вариант Г
-50%
Описание
Проектирование и исследование механизмов гидроподъёмника
Реферат
Расчетно-пояснительная записка к курсовому проекту "Проектирование и исследование механизмов гидроподъёмника" содержит страницу машинописного текста, рисунков, таблиц.В расчетно-пояснительной записке проведено проектирование основного механизма гидроподъёмника, исследовано его движение и определено время срабатывания, проведен кинетостатический силовой расчет основного механизма, проектирование цилиндрической эвольвентной зубчатой передачи, проектирование двухрядного планетарного редуктора, проектирование кулачкового механизма с поступательно движущимся толкателем.
Содержание
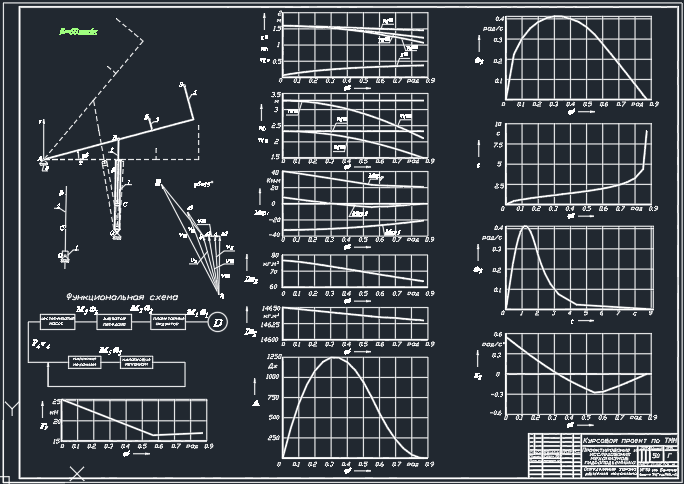
- 1. Определение закона движения механизма 1
- 1.1. Постановка задачи 2
- 1.2. Синтез основного механизма 3
- 1.2.1. Исходные данные 4
- 1.2.2. Определение размеров механизма 5
- 1.3. Определение параметров динамической модели 6
- 1.3.1. Расчет кинематических передаточных функций 7
- 1.3.2. Определение движущей силы по условию безударного останова 8
- 1.3.3. Приведение сил. 9
- 1.3.4. Приведение масс. 9
- 1.4. Построение диаграммы суммарной работы 10
- 1.5. Построение диаграммы угловой скорости звена приведения в функции обобщенной координаты 11
- 1.6. Построение диаграммы времени и определение времени срабатывания 12
- 1.7. Построение диаграммы угловой скорости звена приведения в функции времени 13
- 1.8. Определение углового ускорения звена приведения 14
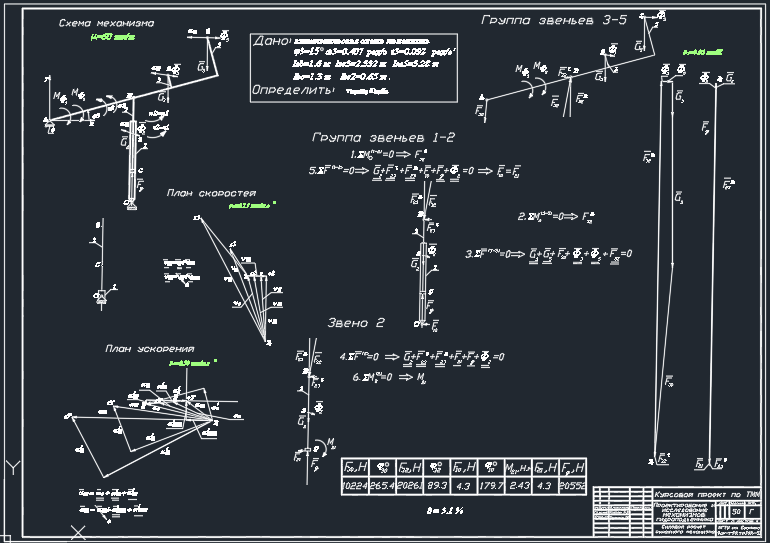
- 2. Силовой расчет механизма 15
- 2.1. Исходные данные для силового расчета механизма 16
- 2.2. Определение инерционной нагрузки на звенья 17
- 2.2.1. Построение плана скоростей 18
- 2.2.2. Построение плана ускорений 19
- 2.2.3. Определение главных векторов и главных моментов сил инерции 20
- 2.3. Силовой расчет 21
- 2.3.1. Группа звеньев 1-2 22
- 2.3.2. Группа звеньев 3-5 23
- 2.3.3. Звено 2 24
- 3. Проектирование цилиндрической эвольвентной зубчатой передачи и планетарного редуктора 25
- 3.1. Проектирование зубчатой передачи 26
- 3.1.1. Исходные данные для проектирования 27
- 3.1.2. Выбор коэффициентов смещения 28
- 3.1.3. Геометрический расчет зацепления 29
- 3.1.4. Построение станочного зацепления 30
- 3.1.5. Построение зубчатого зацепления 31
- 3.2. Проектирование планетарного редуктора 32
- 3.2.1. Исходные данные для проектирования 33
- 3.2.2. Подбор чисел зубьев 34
- 3.2.3. Графическая проверка 35
- 4. Проектирование кулачкового механизма 36
- 4.1. Исходные данные для проектирования 37
- 4.2. Построение кинематических диаграмм движения толкателя 38
- 4.3. Определение основных размеров механизма 39
- 4.4. Построение центрового и конструктивного профилей кулачка 40
- 4.5. Построение диаграммы углов давления 41
- Заключение 42
- Литература 43
Техническое задание на проектирование
Гидроподъемник с приводом от электродвигателя 17 (рис. 50), предназначен для подъёма металлической платформы 3, на которой размещается изделие 5.Подъём платформы 3 осуществляется путём её поворота вокруг неподвижной оси А при помощи гидроцилиндра 1, штока 2 с поршнем С, соединённого шарнирно в точке B с платформой 3. Масло в полость цилиндра нагнетается шестеренчатым насосом 9, приводимым во вращение планетарным редуктором с колёсами 12, 13, 14, 15 и водилом 11, соединенным муфтой 16 с электродвигателем 17.
Давление в цилиндре гидроподъёмника устанавливается регулятором давления 8 путём перемещения плунжера-золтника, связанного с толкателем 7. Дисковый кулачок 6 связан с осью поворота платформы 3 через мультипликатор 18 (u = 3). Закон перемещения толкателя должен удовлетворять заданной функции регулирования давления.
При повороте платформы 3 на угол bmax открывается предохранительный клапан и масло от шестеренчатого насоса возвращается в масляный бак 10. Останов платформы 3 в верхнем положении осуществляется при помощи амортизатора. Закрепление платформы в верхнем положении и её опускание осуществляется перемещением плунжера-золтника при помощи управляющего рычага (на рис 50 не показано).
Силовой расчёт механизма производить при b = 15 (град.)
Примечание. При проектировании и исследовании механизмов гидроподдъёмника считать известными данные, приведенные в таблице 50-1(см. Приложение 2 ).
| Таблица 50-1. | ||||
Исходные данные | ||||
| № пп | Наименование параметра | Обозначение | Размерность | Числовое значение |
| 1 | 2 | 3 | 4 | 5 |
| 1. | Угол поворота платформы при подъёме | bmax | Град | 50 |
| 2. | Расстояние между осями поворота платформы и шарнира крепления штока гидроцилиндра. | lAB | М | 1,6 |
| 3. | Соотношение между ходом поршня и минимальным расстоянием между осями качания гидроцилиндра и шарнира крепления штока. | lOBmin/Hc | __ | 1,2 |
| 4. | Максимально допустимый угол давления в механизме с качающимся гидроцилиндром. | aгц доп | Град | 40 |
| 5. | Относительное расположение центров масс (в системе координат x, y, связанной с платформой) | __ | __ | __ |
| Платформы 3 | К1 = XS3/lAB K2 = YS3/lAB | __ | 1,45 0,15 | |
| Изделия 5 | К3 = XS5/lAB K4 = YS5/lAB | __ | 2,0 0,45 | |
| Штока 2 | K5 = BS2/BC | __ | 0,5 | |
| 6. | Вес платформы 3 | G3 | Н | 1960 |
| 7. | Вес изделия 5 | G5 | Н | 8330 |
| 8. | Вес поршня и штока 2 | G2 | Н | 294 |
| 9. | Вес цилиндра 1 | G1 | Н | 0 |
| 10. | Момент инерции цилиндра 1 и штока 2 отно-но осей, проходящей через их центры масс. | I1S, I2S | Кг*м^2 | 0 |
| 11. | Момент инерции платформы 3 отно-но оси, проходящей через центр масс S3 | I3S | Кг*м^2 | 1 435 |
| 12. | Момент инерции изделия 5 отно-но оси, проходящей через центр масс S5 | I5S | Кг*м^2 | 2 901 |
| 13. | Число оборотов электродвигателя | n17 | об / мин | 10 000 |
| 14. | Число оборотов вала шестеренчатого насоса | n9 = n11 | об / мин | 1 200 |
| 15. | Модуль шестерен насоса | m9 | Мм | 4 |
| 16. | Числа зубьев колёс насоса | Z9 = Z9’ | __ | 10 |
| 17. | Число сателлитов в планетарном редукторе | K | __ | 4 |
| 18. | Параметры исходного производящего контура | a ha* c* | Град - - | 20 1.0 0.25 |
| 19. | Ход толкателя 7 регулятора давления 8. | h | Мм | 10 |
| 20. | Максимально допустимый угол давления в кулачковом механизме 6-7. | [u] | Град. | 22 |
Чертежи
Лист 1 - Определение закона движения ![]()
Лист 2 - Силовой расчет ![]()
Лист 3 - Проектирование зубчатой передачи ![]() Лист 4 - Проектирование кулачкового механизма
Лист 4 - Проектирование кулачкового механизма ![]()
 Лист 4 - Проектирование кулачкового механизма
Лист 4 - Проектирование кулачкового механизма 
Характеристики курсовой работы
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Номер задания
Вариант
Программы
Просмотров
292
Качество
Идеальное компьютерное
Размер
8,26 Mb
Список файлов
РПЗ - 1.doc
РПЗ - 2.doc
Техническое задание.doc
Определение закона движения.xmcd
Проектирование зубчатой передачи.xmcd
Лист (1).dwg
Лист (2).dwg
Лист (3).dwg
Лист (4).dwg
Приложение 1.dwg

Если вам всё понравилось, поставьте оценку и напишите пару слов о работе - так вы поможете другим покупателям. В благодарность мы вернём вам 40 рублей на счёт.❤️
 stud-msc.help
stud-msc.help
18 ноября 2015 в 18:15
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!



















