Курсовая работа: Анализ и синтез линейной сиситемы автоматического управления
Описание
Содержание
3 Изучение основных характеристик САР..................................................... 8
3.1 Исходные данные................................................................................ 8
4 Методы анализа и синтеза линейных систем управления......................... 11
4.1 Исходные данные.................................................................................. 114.2 Определение области устойчивых параметров системы..................... 11
4.3 Определение статической ошибки регулирования.............................. 16
4.5 Вычисление интегральной оценки качества......................................... 19
4.6 Создание инвариантной по отношению к возмущающему воздействию САУ 20
5 Проектирование и настройка ПИД регулятора........................................ 23
5.1 Проектирование непрерывного ПИД регулятора............................... 235.2 Настройка параметров ПИД-регулятора............................................ 26
Список использованных источников 32Введение
Сфера применения теории автоматического управления включает в себя кроме анализа и синтеза линейных и нелинейных САУ еще и статистическую динамику, процессы управления движением летательных аппаратов, проблемы игровых ситуаций, вопросы адаптации, теорию оптимального управления, аналитическое конструирование приборов и регуляторов, а также используется в сфере социальной деятельности человека.
Основной задачей курсового проекта является практическое использование знаний, полученных в процессе изучения курса, развитие навыков анализа и синтеза САУ, в расчете и выборе оптимальных параметров настройки регуляторов с пропорционально-интегрально-дифференциальным (ПИД) законами управления.
В курсовом проекте комплексно анализируются линейные системы управления, рассчитываются их области устойчивости по критерию Гурвица и апериодичности по критерию Эйлера, статические ошибки. Содержание проекта отвечает разделам курса, что позволяет выполнить его непосредствен-ную после проработки и усвоения определенного раздела, используя при этом соответствующие нормативные материалы.
Термины и определения
Теория автоматического управления – это часть кибернетики. Она изучает автоматическое управление техническими объектами.
Система автоматического управления – это совокупность объекта управления и устройства управления.
Система автоматического регулирования – это автоматическая система с замкнутой цепью воздействия, в котором управление вырабатывается в результате сравнения истинного значения с заданным.
Автоматическое управление – это управление, осуществляемое без участия человека.
Управление – это процесс воздействия на объект с целью обеспечения требуемого течения процессов в нем или требуемого изменения его состояния. Объект управления – устройство, требуемый режим которого должен поддерживаться извне специально организованными управляющими воздей-
ствиями.
Алгоритм управления – последовательность операций, которые должны быть реализованы техническими средствами в соответствии с получаемой информацией и результатами промежуточных вычислений, чтобы обеспечить протекание технологического процесса в требуемом направлении.
Регулирование – частный вид управления, когда задачей является обеспечение изменения какого-либо параметра системы по определенному закону. Автоматическое регулирование осуществляется приложением управляющего воздействия к регулирующему органу объекта управления.
Входное задающее воздействие X (φиз) – воздействие, подаваемое на вход системы или устройства и определяющее требуемый закон изменения регулируемой величины Y.
Выходная регулируемая величина Y (φи) – выходной параметр процесса, который необходимо поддерживать постоянным или изменять по определенному закону.
Сокращения
САУ – системы автоматического управления; СС – следящие системы;
САР – система автоматического регулирования; ОР – объект регулирования;
ОУ – объект управления;
УУ – устройство управления;
КУ – компенсирующее устройство; ЗУ – задающее устройство;
АФЧХ – амплитудно-фазовая частотная характеристика ММ – математическая модель;
АФХ – амплитудно-фазовая характеристика; АЧХ – амплитудно-частотная характеристика; ПФ – передаточная функция;
САУ – система автоматического управления;
ПИД – пропорционально-интегрально-дифференцирующий; ПИ – пропорционально-интегрально;
ПД – пропорционально-дифференцирующий; ШИМ – широтно-импульсная модуляция; АИМ – амплитудно-импульсная модуляция.
Изучение основных характеристик САР
Исходные данные
Исходные данные (вариант 047) для данного раздела представлены в таблице 1. Структурная схема (рис. 1) и передаточные функции звеньев представлены ниже.
Таблица 1 – Параметры звеньев
Параметр | Т1 | 1 Т1 | Т2 | Т3 | Т4 | Т5 | Т6 | К1 | К2 | K3 | X(t) |
значения | 7 | 0,7 | 2.7 | 3.7 | 4.7 | 5.7 | 6.7 | 1.7 | 2.7 | 3.7 | 0.7 |
Передаточные функции звеньев:
|
𝑊2(p) = K2,
𝑊 (p) = K3.
3T2p3+T3p2+T4p+1
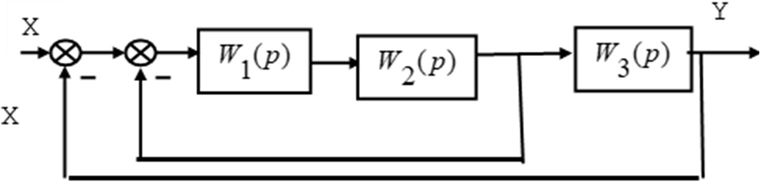
Рисунок 1 – Структурная схема САР
 КубГТУ
КубГТУ all_at_700
all_at_700















