Курсовая работа: Проектирование позиционной системы микропроцессорного управления электронно-лучевой установки
Описание
Глава 1. Исследование объекта управления и синтез неизменяемой части системы
1.1. Техническое описание объекта управления.
1.2. Технология работы ЭЛУ.
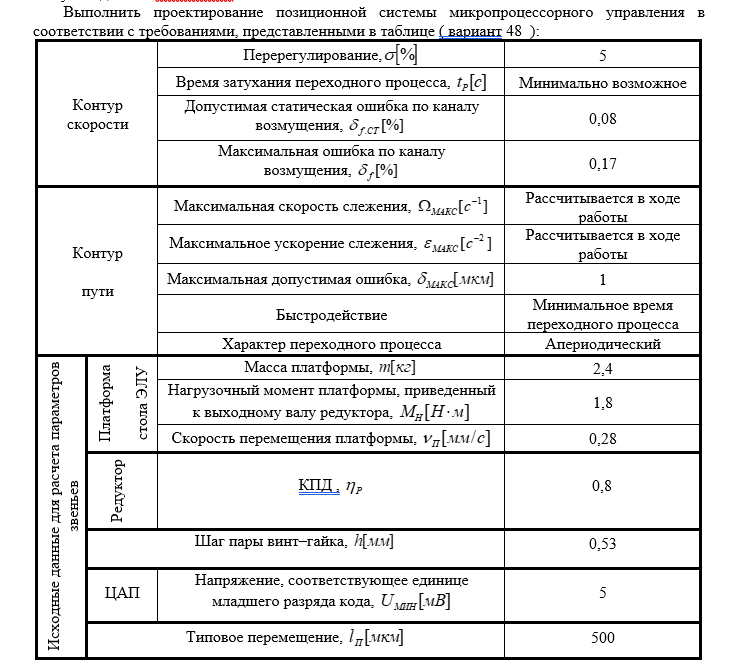
1.3. Формирование требований к системе управления.
1.4. Выбор принципа управления.
1.5. Проектирование функциональной схемы САУ.
1.6. Выбор элементов функциональной схемы и определение их параметров:
1.6.1. Платформа стола ЭЛУ;
1.6.2. Редуктор;
1.6.3. Исполнительный двигатель;
1.6.4. Преобразователь частоты;
1.6.5. Цифровой датчик скорости вала двигателя;
1.6.6. Цифровой датчик положения платформы;
1.6.7. Цифровой контроллер.
1.7. Построение структурной схемы САУ.
Глава 2. Синтез контура регулирования скорости двигателя
2.1. Расчёт номинального установившегося режима работы контура
регулирования скорости двигателя.
2.2. Исследование устойчивости и качества переходных процессов контура
регулирования скорости двигателя.
2.3. Выбор формы ЛЧХ требуемой системы.
2.4. Определение оптимального закона регулирования в аналоговой и цифровой
формах.
2.5. Исследование влияния возмущения и компенсация его влияния.
Глава 3. Синтез контура пути
3.1. Цифровая модель позиционной системы микропроцессорного управления.
3.2. Расчёт установившегося режима контура пути.
3.3. Анализ линейной цифровой нескорректированной САУ.
3.4. Построение ЛПЧХ и расчёт линейной программы коррекции.
3.5. Расчёт времени постоянного запаздывания по цепи ЦД-микроЭВМ-ЦАП.
3.6. Построение и анализ переходной функции линейной цифровой САУ.
3.7. Влияние нелинейностей на работу системы.
![]()
1.1. Техническое описание объекта управления.
1.2. Технология работы ЭЛУ.
1.3. Формирование требований к системе управления.
1.4. Выбор принципа управления.
1.5. Проектирование функциональной схемы САУ.
1.6. Выбор элементов функциональной схемы и определение их параметров:
1.6.1. Платформа стола ЭЛУ;
1.6.2. Редуктор;
1.6.3. Исполнительный двигатель;
1.6.4. Преобразователь частоты;
1.6.5. Цифровой датчик скорости вала двигателя;
1.6.6. Цифровой датчик положения платформы;
1.6.7. Цифровой контроллер.
1.7. Построение структурной схемы САУ.
Глава 2. Синтез контура регулирования скорости двигателя
2.1. Расчёт номинального установившегося режима работы контура
регулирования скорости двигателя.
2.2. Исследование устойчивости и качества переходных процессов контура
регулирования скорости двигателя.
2.3. Выбор формы ЛЧХ требуемой системы.
2.4. Определение оптимального закона регулирования в аналоговой и цифровой
формах.
2.5. Исследование влияния возмущения и компенсация его влияния.
Глава 3. Синтез контура пути
3.1. Цифровая модель позиционной системы микропроцессорного управления.
3.2. Расчёт установившегося режима контура пути.
3.3. Анализ линейной цифровой нескорректированной САУ.
3.4. Построение ЛПЧХ и расчёт линейной программы коррекции.
3.5. Расчёт времени постоянного запаздывания по цепи ЦД-микроЭВМ-ЦАП.
3.6. Построение и анализ переходной функции линейной цифровой САУ.
3.7. Влияние нелинейностей на работу системы.
Характеристики курсовой работы
Учебное заведение
 ПНИПУ
ПНИПУПросмотров
4
Качество
Идеальное компьютерное
Размер
4,41 Mb
Список файлов
Kursovaya_rabota (13).docx

Если нужен другой вариант работы или отдельная задача из любой работы, пишите в комментарии
30 сентября 2022 в 10:46
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!

















