Дифференциально-геометрические методы теории управления. Конспекты лекций для студентов МГТУ Баумана ФН-12.
Описание
Дифференциально-геометрические методы теории управления
Четвериков В.Н.
Лекции для бакалавров ФН-12, 7 семестр
ОГЛАВЛЕНИЕ
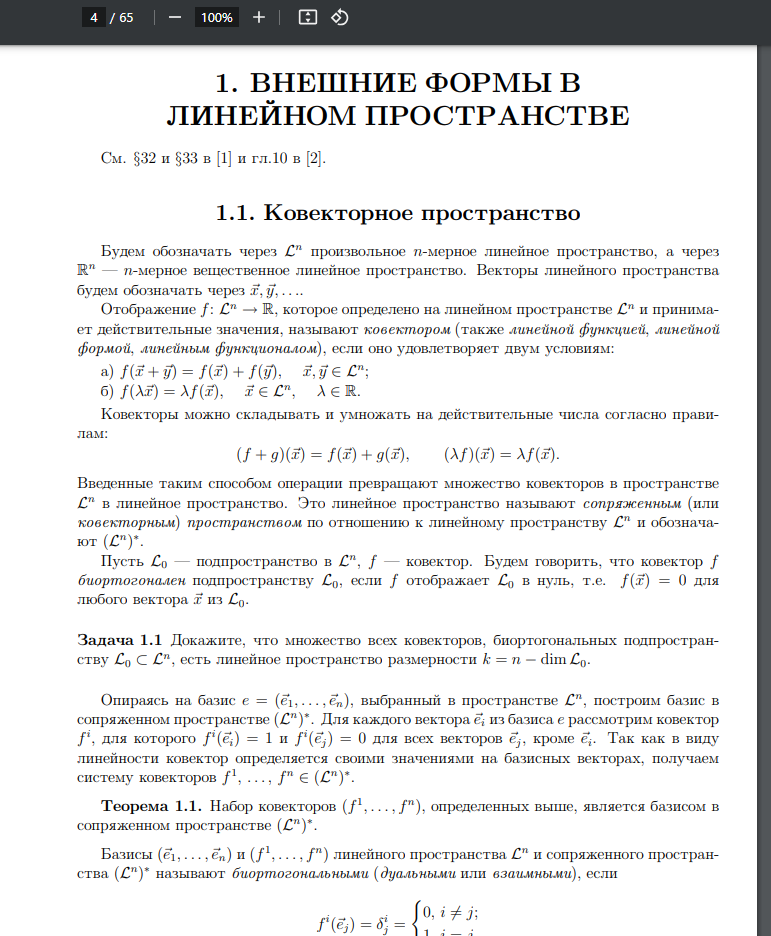
1. Внешние формы в линейном пространстве 3
1.1. Ковекторное пространство . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2. Полилинейные формы и p-формы . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3. Внешнее произведение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.4. Внутреннее произведение и отображение p-форм . . . . . . . . . . . . . . . . 6
2. Касательное расслоение 7
2.1. Многообразия и их отображения . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2. Касательные векторы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.3. Касательное пространство . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3. Векторные поля 13
3.1. Определение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.2. Отображения векторных полей . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.3. Фазовый поток векторного поля . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.4. Коммутатор векторных полей . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4. Распределения 21
5. Системы линейных уравнений в частных производных 28
6. Некоторые приложения теории векторных полей и распределений 30
6.1. Динамические системы с управлением . . . . . . . . . . . . . . . . . . . . . . 30
6.2. Приведение систем с управлением к каноническому виду . . . . . . . . . . . 32
6.3. Преобразование систем с векторным управлением . . . . . . . . . . . . . . . 35
6.4. Матрица управляемости . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
7. Дифференциальные формы 38
8. Дифференциал де Рама 41
9. Кораспределения, связанные с системами управления 44
9.1. Определение и свойства . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
9.2. Описание модулей Hk на языке векторных полей . . . . . . . . . . . . . . . . 45
9.3. Функциональная независимость . . . . . . . . . . . . . . . . . . . . . . . . . . 46
10. Линеаризация статической обратной связью 48
10.1. Условия приводимости систем с управлением к каноническому виду на языке дифференциальных форм . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
10.2. Линеаризация статической обратной связью . . . . . . . . . . . . . . . . . . . 50
11. Динамически линеаризуемые и плоские системы 52
11.1. Понятие динамической обратной связи . . . . . . . . . . . . . . . . . . . . . . 52
11.2. Плоские системы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
11.3. Построение динамической обратной связи, линеаризующей плоскую систему 54
12. Метод динамической обратной связи 56
12.1. Решение задач терминального управления и стабилизации . . . . . . . . . . 56
12.2. Управление движением самолета вертикального взлета . . . . . . . . . . . . 58
1
ОГЛАВЛЕНИЕ 2
13. Управляемость, достижимость и наблюдаемость систем 61
13.1. Первые интегралы систем . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
13.2. Условия управляемости и достижимости . . . . . . . . . . . . . . . . . . . . . 62
13.3. Наблюдаемость систем . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
и тд
Показать/скрыть дополнительное описание
Лекции по курсу Дифференциально-геометрические методы теории управления Четвериков В.Н. Лекции для бакалавров ФН-12, 7 семестр ОГЛАВЛЕНИЕ 1. Внешние формы в линейном пространстве 3 1.1. Ковекторное пространство . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 1.2. Полилинейные формы и p-формы . . . . . . . . . . . . . . . . . . . . . . . . . 4 1.3. Внешнее произведение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 1.4. Внутреннее произведение и отображение p-форм . . . . . . . . . . . . . . . . 6 2. Касательное расслоение 7 2.1. Многообразия и их отображения . . . . . . . . . . . . . . . . . . . . . . . . . 7 2.2. Касательные векторы .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 2.3. Касательное пространство . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 3. Векторные поля 13 3.1. Определение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 3.2. Отображения векторных полей . . . . . . . . . . . . . . . . . . . . . . . . . . 14 3.3. Фазовый поток векторного поля . . . . . . . . . . . . . . . . . . . . . . . . . . 15 3.4. Коммутатор векторных полей . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 4. Распределения 21 5. Системы линейных уравнений в частных производных 28 6. Некоторые приложения теории векторных полей и распределений 30 6.1.
Динамические системы с управлением . . . . . . . . . . . . . . . . . . . . . . 30 6.2. Приведение систем с управлением к каноническому виду . . . . . . . . . . . 32 6.3. Преобразование систем с векторным управлением . . . . . . . . . . . . . . . 35 6.4. Матрица управляемости . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36 7. Дифференциальные формы 38 8. Дифференциал де Рама 41 9. Кораспределения, связанные с системами управления 44 9.1. Определение и свойства . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44 9.2. Описание модулей Hk на языке векторных полей . . . . . . . . . . . . . . . . 45 9.3. Функциональная независимость . . .
. . . . . . . . . . . . . . . . . . . . . . . 46 10. Линеаризация статической обратной связью 48 10.1. Условия приводимости систем с управлением к каноническому виду на языке дифференциальных форм . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48 10.2. Линеаризация статической обратной связью . . . . . . . . . . . . . . . . . . . 50 11. Динамически линеаризуемые и плоские системы 52 11.1. Понятие динамической обратной связи . . . . . . . . . . . . . . . . . . . . . . 52 11.2. Плоские системы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53 11.3. Построение динамической обратной связи, линеаризующей плоскую систему 54 12. Метод динамической обратной связи 56 12.1.
Решение задач терминального управления и стабилизации . . . . . . . . . . 56 12.2. Управление движением самолета вертикального взлета . . . . . . . . . . . . 58 1 ОГЛАВЛЕНИЕ 2 13. Управляемость, достижимость и наблюдаемость систем 61 13.1. Первые интегралы систем . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61 13.2. Условия управляемости и достижимости . . . . . . . . . . . . . . . . . . . . . 62 13.3. Наблюдаемость систем . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62 и тд .
Характеристики лекций
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаПреподаватели

Список файлов

 EcoTime Inc.
EcoTime Inc.Комментарии
Отзывы на другие работы автора
















