НИР: Исследование алгоритмов оценивания для повышения точности навигационных систем
-41%
Описание
Введение.
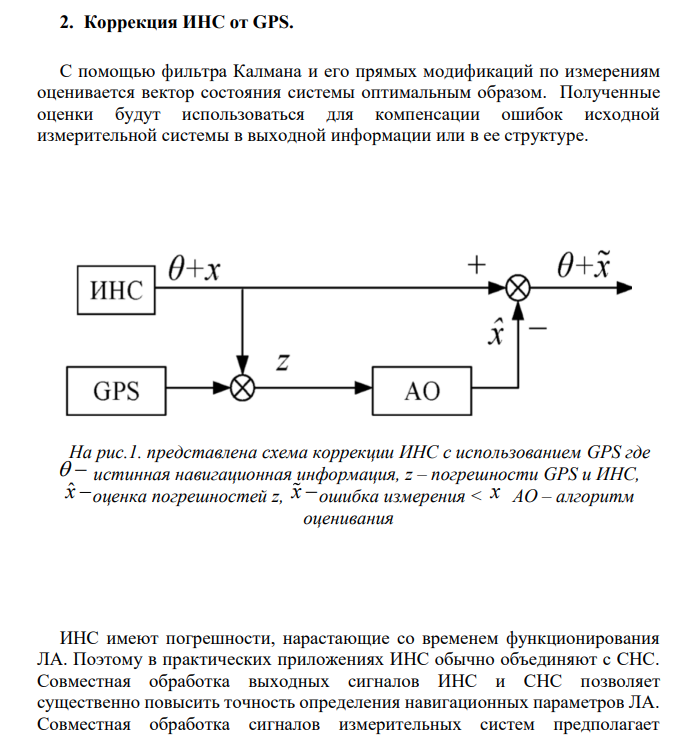
Управление динамическими объектами, в частности летательными аппаратами (ЛА), обычно осуществляется на основе навигационной информации. В настоящее время наиболее точными являются измерительные системы, объединенные в навигационный комплекс (НК). Как правило, базовой системой НК является инерциальная навигационная система (ИНС), а в качестве внешних измерительных систем используются ГЛОНАСС, различные РЛС, доплеровские измерители скорости и сноса (ДИСС), астрокорректоры и т.п. Современные ИНС имеют погрешности, обусловленные различными факторами. Эти погрешности можно компенсировать посредством конструкторских и алгоритмических методов. Реализация конструкторских методов требует значительного времени и новой технологической базы, а алгоритмические методы легко реализуются и позволяют повысить точность серийных измерительных систем. Алгоритмические методы повышения точности ИНС, как правило, включают в себя алгоритмы оценивания, управления, прогноза и комплексирования. Эти алгоритмы предполагают использование математической модели погрешностей ИНС. При функционировании ИНС ЛА на атмосферном участке на длительных интервалах времени без коррекции от внешних измерительных систем наземных станций ближней и дальней навигации, спутниковых систем для 4 компенсации погрешностей используют способы формирования корректирующего сигнала на основе информации с датчиков углов прецессии гироскопов, формируют компенсационные сигналы с помощью алгоритмов фильтрации. Если автономному режиму функционирования ИНС предшествовал корректируемый режим, то применяется схема коррекции с помощью алгоритма прогноза. Прогнозирующая модель может быть построена с помощью алгоритма самоорганизации или генетического алгоритма. В условиях коррекции ИНС от внешнего датчика навигационной информации обычно используют схему коррекции с алгоритмом оценивания. В качестве алгоритма оценивания применяют различные адаптивные модификации линейного фильтра Калмана, а для высокоточной коррекции используют модификации нелинейного фильтра Калмана.
![]()
![]()
Управление динамическими объектами, в частности летательными аппаратами (ЛА), обычно осуществляется на основе навигационной информации. В настоящее время наиболее точными являются измерительные системы, объединенные в навигационный комплекс (НК). Как правило, базовой системой НК является инерциальная навигационная система (ИНС), а в качестве внешних измерительных систем используются ГЛОНАСС, различные РЛС, доплеровские измерители скорости и сноса (ДИСС), астрокорректоры и т.п. Современные ИНС имеют погрешности, обусловленные различными факторами. Эти погрешности можно компенсировать посредством конструкторских и алгоритмических методов. Реализация конструкторских методов требует значительного времени и новой технологической базы, а алгоритмические методы легко реализуются и позволяют повысить точность серийных измерительных систем. Алгоритмические методы повышения точности ИНС, как правило, включают в себя алгоритмы оценивания, управления, прогноза и комплексирования. Эти алгоритмы предполагают использование математической модели погрешностей ИНС. При функционировании ИНС ЛА на атмосферном участке на длительных интервалах времени без коррекции от внешних измерительных систем наземных станций ближней и дальней навигации, спутниковых систем для 4 компенсации погрешностей используют способы формирования корректирующего сигнала на основе информации с датчиков углов прецессии гироскопов, формируют компенсационные сигналы с помощью алгоритмов фильтрации. Если автономному режиму функционирования ИНС предшествовал корректируемый режим, то применяется схема коррекции с помощью алгоритма прогноза. Прогнозирующая модель может быть построена с помощью алгоритма самоорганизации или генетического алгоритма. В условиях коррекции ИНС от внешнего датчика навигационной информации обычно используют схему коррекции с алгоритмом оценивания. В качестве алгоритма оценивания применяют различные адаптивные модификации линейного фильтра Калмана, а для высокоточной коррекции используют модификации нелинейного фильтра Калмана.
Характеристики НИР
Предмет
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаПросмотров
6
Размер
1,32 Mb
Список файлов
Исследование алгоритмов оценивания для повышения точности навигационных систем.pdf

Друзья, спасибо за доверие! Если вам понравилась работа – поставьте 5⭐ и напишите отзыв. Это поможет другим студентам, а мне даст силы делать ещё больше качественных материалов для вас 🔥
 anhyeuem
anhyeuem
15 мая 2021 в 14:34
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!



















