
Типы связей между подсистемами различной физической природы
Типы связей между подсистемами различной физической природы.
Ранее были рассмотрены эквивалентные схемы однородных физических подсистем. Но реальный объект представляет собой совокупность разнородных физических подсистем. Согласно основным этапам получения ММС на макроуровне, после составления эквивалентных схем однородных подсистем следует установить связи между ними, т. е. определить их воздействие друг на друга.
Можно выделить три типа связей:
1) трансформаторная
При трансформаторном типе связи в одной подсистеме включается зависимый источник разности потенциалов. Этот источник зависит от разности потенциалов на зависимом источнике потока, установленном в другой подсистеме, который, в свою очередь, зависит от потока через первый источник. На рис. 10, а показана эквивалентная схема трансформаторной связи, где р и q - подсистемы различной природы.
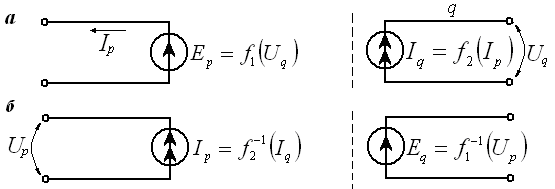
Рис. 10. Схема трансформаторного типа связи.
Если же источники в подсистемах поменять местами, то схема будет иметь такой вид, как изображено на рис. 10, б. Подобный вид связи уже встречался в ранее рассмотренных примерах эквивалентных схем однородных физических подсистем (рычаг, зубчатое зацепление колес).
Для разнородных физических подсистем рассмотренная выше связь характерна при электромеханическом взаимодействии.
Рекомендуемые материалы
Пример трансформаторного типа связи.
На рис. 11, а представлен электромеханический вибратор, на рис. 11, б - его эквивалентная схема.
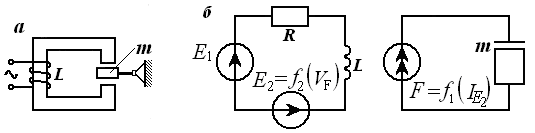
Рис. 11. Пример электромеханического вибратора (а) и его эквивалентная схема (б).
Источник силы F, воздействующий на массу т, зависит от скорости изменения электромагнитного поля, т. е. от тока через катушку электромагнита, или, что то же самое, от тока через источник противо-э.д.с. Е2, который зависит от скорости движения массы т, Е1 - входное синусоидальное напряжение; R - активное сопротивление обмотки электромагнита.
Использование схемы рис. 10, а или 10, б определяются из физических соображений или же из учета последовательного и параллельного подключения источников.
2) гираторная
При гираторном типе связи в обеих физических подсистемах включаются зависимые источники одного вида: либо типа разности потенциалов, либо типа тока. Источники разности потенциалов зависят от потока через источник в другой подсистеме (рис. 12, а), источники потока зависят от разности потенциалов на источнике в другой подсистеме (рис. 12, б). Такой вид связи характерен при взаимодействии механической и гидравлической или пневматической подсистем.
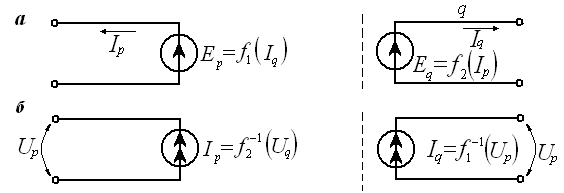
Рис. 12. Схема гираторного типа связи.
Пример гираторного типа связи.
На рис. 13, а изображен гидроцилиндр (совокупность гидравлической и пневматической подсистем), а на рис. 13, б - его эквивалентная схема.
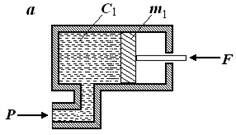
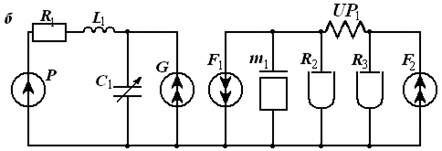
Рис. 13. Схематичное изображение гидроцилиндра (а) и его эквивалентная схема (б).
Гидравлическая система на эквивалентной схеме представлена источником давления Р, который через трубопровод (элементы R1 и L1) нагнетает жидкость в переменную емкость C1, механическая подсистема представлена источником усилия F2, который, преодолевая трение штока о стенки, через упругий шток UP1 передвигает поршень массой m1, имеющий трение R2 о стенки цилиндра.
Воздействие на гидравлическую подсистему со стороны механической учитывается источником расхода G, который зависит от скорости движения поршня, т. е.  при
при  , где S - площадь поперечного сечения поршня;
, где S - площадь поперечного сечения поршня;  - плотность жидкости; V - скорость движения поршня (потенциал механической подсистемы).
- плотность жидкости; V - скорость движения поршня (потенциал механической подсистемы).
"Лекция 4" - тут тоже много полезного для Вас.
Источник силы F1 учитывает воздействие гидравлической подсистемы на механическую:  при
при  , где Р - давление в емкости C1 (потенциал гидравлической подсистемы).
, где Р - давление в емкости C1 (потенциал гидравлической подсистемы).
Выбор схемы связи (рис. 12, а или 12, б) выполняют так же, как и для трансформаторной связи.
Примечание. Трансформаторная и гираторная связи устанавливают взаимодействие подсистемы по двум парам фазовых переменных. В последнем примере неверной будет такая связь: в гидравлической подсистеме зависимый источник расхода  , а в механической - зависимый источник скорости
, а в механической - зависимый источник скорости  . В этом случае было бы установлено соответствие только между фазовыми переменными одной пары.
. В этом случае было бы установлено соответствие только между фазовыми переменными одной пары.
3) через зависимые параметры элементов.
Связь через зависимые параметры элементов характерна при взаимодействии с тепловой подсистемой. В зависимости от значений температуры меняются параметры элементов взаимодействующей подсистемы, например вязкость жидкости, значение сопротивления резистора. Обратное влияние на тепловую подсистему учитывается введением в эквивалентную схему тепловой подсистемы зависимых источников теплового потока. При отсутствии массопереноса значение источника определяется мощностью, выделяемой элементом; при наличии массопереноса - переносимой массой.
В случае моделирования влияния температуры на работу технических объектов без учета обратного воздействия предполагают, как будет изменяться температура во времени, и переносят эту зависимость на параметры элементов объекта, т. е. делают параметры зависимыми от времени. Аналогично моделируют старение элементов объекта при расчетах надежности.


















