
Автоматическое управление угловой скоростью и током якоря дпт нв в замкнутых системах электропривода
2.3. Автоматическое управление угловой скоростью и током якоря дпт нв в замкнутых системах электропривода
2.3.1. Регулирование угловой скорости в системе УП-ДПТ НВ с отрицательной обратной связью по скорости и отсечкой по току якоря
Как отмечалось в разделе выше, для обеспечения большего диапазона регулирования скорости целесообразно осуществляет регулирование wд изменением напряжения на якоре. В простейшей схеме (см. рис. 2.16) диапазон регулирования wд ограничен падением скорости под нагрузкой. Этот недостаток устраняется использованием замкнутых систем с отрицательной обратной связью по угловой скорости. Функциональная схема такой системы приведена на рис. 2.23. Она содержит двигатель М, выходной величиной которого является угловая скорость wд; управляемый преобразователь УП, создающий регулирующее воздействие Uя на двигатель; усилитель У, на входе которого сравниваются
 |
напряжение Uзд и напряжение обратной связи Uос. Напряжение Uзд создается задатчиком скорости (ЗС).
В качестве задатчика обратной связи используется тахогенератор BR, напряжение на выходе которого Uос пропорционально wд.
На выходе узла сравнение сигналов (на схеме узел показан в виде окружности) формируется напряжение ошибки
 . (2.30)
. (2.30)
Как известно из теории автоматического управления, в замкнутой системе обеспечивается стабилизация регулируемой переменной – в данном случае wд.
Рекомендуемые материалы
Напомним, как протекает этот процесс. Если, например, под действием нагрузки wд начинает снижаться, то уменьшается Uос, а напряжение Ud, в соответствии с выражением (2.30), начинает увеличиваться. При этом возрастает напряжение на выходе усилителя Uу и якоре двигателя Uя. В результате угловая скорость стремится к заданному значению. Несложно убедиться, что в случае возрастания wд, действие обратной связи приведет к снижению Uя, и угловая скорость вновь будет стремиться к заданной.
 |
Таким образом в замкнутой системе удается получить механические характеристики близкие к абсолютно жестким (см. рис. 2.24 участок характеристики для
 ) и обеспечить достаточно малые значения нижней скорости wн. Иными словами, в такой схеме удается реализовать большой диапазон регулирования скорости.
) и обеспечить достаточно малые значения нижней скорости wн. Иными словами, в такой схеме удается реализовать большой диапазон регулирования скорости. Упрощенная принципиальная схема рассматриваемой системы приведена на рис. 2.25. Датчиком скорости в схеме является тахогенератор BR – машина постоянного тока с возбуждением от постоянных магнитов, вал которой механически соединен с валом двигателя М. Машина BR работает в режиме генератора, и ее ЭДС – напряжение обратной связи Uос, в соответствии с уравнением (2.13), пропорционально wд.
Сравнение электрических сигналов в современных схемах осуществляется на входе операционного усилителя DА. На его инвертирующий вход через резистор R1 подается напряжение задания Uзд, снимаемое с потенциометра RP (задатчика скорости), а через R2 напряжение Uос.
На входе усилителя происходит сравнение (вычитание) этих сигналов в соответствии с (2.30), а напряжение на выходе усилителя
 ,
,
где Ку – коэффициент усиления усилителя.
В цепь обратной связи операционного усилителя включен резистор R3, определяющий значение Ку.
Рассмотренные узлы и элементы схемы обеспечивают ее работу в режиме стабилизации скорости. Однако для нормальной работы электропривода этого недостаточно. Действительно, если произойдет, например, поломка механизма, порождающая возрастание момента статического сопротивления, то соответственно, будут нарастать ток якоря и момент двигателя. Недопустимое нарастание тока якоря возникает также при пуске двигателя и других переходных режимах.
Для исключения подобных ситуаций схема должна быть дополнена узлом ограничения тока якоря. Один из возможных вариантов реализации этого узла показан на рис. 2.25 (его также называют узлом токовой отсечки). Он включает датчик тока якоря – шунт RS, включенный в якорную цепь и стабилитроны VD1, VD2. Сигнал Uост с шунта RS может поступать на вход операционного усилителя через VD1, VD2 и резистор R4.
 |
Рассмотрим работу схемы.
При проектировании схемы задаются значением тока отсечки Iотс . С учетом допустимой кратковременной перегрузки двигателя его обычно принимают Iотс=(2…2,5)Iном. Напряжение стабилизации стабилитронов выбирают
 .
.
Тогда при токе якоря  напряжение
напряжение  . Для полярности напряжения Uотс, показанной на рис. 2.25, стабилитрон VD1 включен в обратном направлении. Его сопротивление при велико, и напряжение Uотс не поступает на вход DA. В результате узел токовой отсечки при токах не оказывает влияния на работу схемы – система работает в режиме стабилизации скорости (1-ый участок на рис. 2.24).
. Для полярности напряжения Uотс, показанной на рис. 2.25, стабилитрон VD1 включен в обратном направлении. Его сопротивление при велико, и напряжение Uотс не поступает на вход DA. В результате узел токовой отсечки при токах не оказывает влияния на работу схемы – система работает в режиме стабилизации скорости (1-ый участок на рис. 2.24).
Если же ток якоря превысит ток отсечки  , то напряжение на шунте Uотс станет больше Uz. Сопротивление стабилитрона при этом резко снизится (стабилитрон «пробьется») и на вход DA будет поступать дополнительный сигнал (
, то напряжение на шунте Uотс станет больше Uz. Сопротивление стабилитрона при этом резко снизится (стабилитрон «пробьется») и на вход DA будет поступать дополнительный сигнал ( ). Этот сигнал вычитается из сигнала задания, т.е. теперь сигнал ошибки будет
). Этот сигнал вычитается из сигнала задания, т.е. теперь сигнал ошибки будет
 . (2.31)
. (2.31)
Схема переходит в режим стабилизации тока якоря (2-ой участок на рис. 2.24). При возрастании тока Iя увеличивается напряжение Uост, а сигнал ошибки Ud уменьшается. Это ведет к снижению напряжения на выходе усилителя Uу, уменьшается также Uя и wд. В итоге двигатель останавливается.
В реверсивном электроприводе полярность напряжения на шунте изменяется, поэтому необходимо использовать 2 стабилитрона, включенных встречно.
Как следует из изложенного, в схеме для ограничения тока якоря используется отрицательная обратная связь по току якоря. В отличие от обратной связи по скорости, связь по току задержанная – она вступает в действие только тогда, когда ток якоря превышает ток отсечки.
Узел токовой отсечки обеспечивает ограничение тока якоря также в переходных режимах. Например, при пуске двигателя в начальный момент сигнал тахогенератора Uос = 0, а сигнал ошибки Ud, как следует из (2.31), значительно превышает установившееся значение. Поэтому напряжения Uу и Uя начинают интенсивно нарастать.
Поскольку wд и ЭДС двигателя пока малы, ток якоря резко возрастает, и вступает в действие токовая отсечка. Следовательно, разгон двигателя идет при ограниченном значении тока (на рис. 2.24 процесс изменения Iя при пуске условно показан стрелками).
По мере разгона двигателя wд , ЭДС двигателя и сигнал обратной связи по скорости Uос возрастают, а сигнал Ud уменьшается. При подходе к заданной скорости ток якоря начинает спадать, и система переходит в режим стабилизации заданного значения скорости (например, wв на рис. 2.24).
Таким образом, задержанная отрицательная обратная связь в электроприводе обеспечивает ограничение тока (момента) двигателя в переходных режимах и в ситуациях, связанных с недопустимым возрастанием момента сопротивления производственного механизма.
2.3.2. Уравнение статики системы УП-ДПТ НВ
с отрицательной обратной связью по угловой скорости
Важнейшим показателем качества работы электропривода в установившихся режимах является значение статической ошибки в поддержании скорости. Статическая ошибка возникает из-за изменения нагрузки, отклонений сетевого напряжения, дрейфа нуля усилителя и других возмущений. Наибольший «вклад» в величину статической ошибки, во многих случаях, вносит изменение нагрузки. Как показано выше, использование отрицательной обратной связи по скорости позволяет уменьшить статическую ошибку. Получим количественные соотношения для оценки значения статической ошибки Dwд, вызванной изменением нагрузки, и выясним за счет чего можно обеспечить требуемую точность поддержания угловой скорости.
Для анализа статической точности систем, как известно из теории автоматического управления, целесообразно использовать алгоритмическую (структурную) схему системы. Алгоритмическая схема системы с отрицательной обратной связью по угловой скорости показана на рис. 2.26.
 |
Свойства отдельных звеньев отражены на ней соответствующими коэффициентами передачи: Ку – усилителя, Куп – управляемого преобразователя, Кд – двигателя, КBR – тахогенератора. Падение напряжения в якорной цепи двигателя и управляемого преобразователя при номинальном токе Iном учтено помехой нагрузки
 , (2.32)
, (2.32)
где Rя, Rуп – сопротивление якорной цепи двигателя и выходное сопротивление УП.
Запишем уравнение для разомкнутой системы (размыкание системы по цепи обратной связи условно показано на рис. 2.26 волнистыми линиями). На основе принципа суперпозиции сигнал на выходе системы можно представить в виде двух составляющих. Одна из них зависит от Uзд, а вторая от hн:
 . (2.33)
. (2.33)
Первая составляющая представляет собой угловую скорость  на холостом ходу, а вторая – статическую ошибку разомкнутой системы (падение угловой скорости от нагрузки в разомкнутой системе, см. рис. 2.27)
на холостом ходу, а вторая – статическую ошибку разомкнутой системы (падение угловой скорости от нагрузки в разомкнутой системе, см. рис. 2.27)
 (2.34)
(2.34)
Сравнивая выражения (2.23) и (2.12), легко заметить, что они отличаются только учетом  .
.
Уравнение для замкнутой системы записывается из аналогичных соображений, необходимо только учесть, что в замкнутой системе на вход поступает сигнал ошибки  :
:
 |
 . (2.35)
. (2.35) Напряжение обратной связи, как следует из алгоритмической схемы, можно определить через выходной сигнал системы

тогда
 .
.
Подставив последнее выражение для  в (2.35), после несложных преобразований получим
в (2.35), после несложных преобразований получим
 . (2.36)
. (2.36)
Первый член в этом выражении, так же, как в (2.33), это угловая скорость двигателя  , но в замкнутой системе. Второй член – статическая ошибка замкнутой системы (падение угловой скорости
, но в замкнутой системе. Второй член – статическая ошибка замкнутой системы (падение угловой скорости  от нагрузки в замкнутой системе). Проанализируем эту составляющую подробней. Произведение коэффициентов передачи звеньев одноконтурной системы называют коэффициентом усиления системы в разомкнутом состоянии (или просто коэффициентом усиления разомкнутой системы)
от нагрузки в замкнутой системе). Проанализируем эту составляющую подробней. Произведение коэффициентов передачи звеньев одноконтурной системы называют коэффициентом усиления системы в разомкнутом состоянии (или просто коэффициентом усиления разомкнутой системы)
 . (2.37)
. (2.37)
С учетом этого понятия и выражения (2.37) для статической ошибки разомкнутой системы статическую ошибку замкнутой системы можно представить в виде
 . (2.38)
. (2.38)
Аналогичное соотношение несложно получить и для относительных статических ошибок
 . (2.39)
. (2.39)
Из уравнений (2.38), (2.39) следует, что абсолютная и относительная статические ошибки от нагрузки в замкнутой системе уменьшаются в (1+Кр) раз по сравнению с разомкнутой.
Очевидно, что для уменьшения статических ошибок  ,
,  до допустимых пределов необходимо увеличивать Кр. Коэффициенты передачи управляемого преобразователя Куп, двигателя Кд, тахогенератора КBR, входящие в выражение (2.37) для Кр, обычно заданы достаточно жестко. И нужное значение Кр обеспечивается выбором соответствующего значения Ку. Известно, что если в цепь обратной связи операционного усилителя включить конденсатор, то усилитель приобретает свойства интегрирующего звена. Коэффициент передачи идеального интегрирующего звена
до допустимых пределов необходимо увеличивать Кр. Коэффициенты передачи управляемого преобразователя Куп, двигателя Кд, тахогенератора КBR, входящие в выражение (2.37) для Кр, обычно заданы достаточно жестко. И нужное значение Кр обеспечивается выбором соответствующего значения Ку. Известно, что если в цепь обратной связи операционного усилителя включить конденсатор, то усилитель приобретает свойства интегрирующего звена. Коэффициент передачи идеального интегрирующего звена  . В этом случае и
. В этом случае и , а статическая ошибка , в соответствии с выражением (2.38), стремится к нулю. Поэтому в современных системах электропривода на операционном усилителе обычно реализуют интегрирующее звено (операционный усилитель, охваченный емкостной обратной связью называют интегральным регулятором). В связи с тем, что коэффициент усиления реальных операционных усилителей имеет конечное значение, реальный интегральный регулятор имеет не бесконечное, но достаточно большое значение коэффициента передачи. В результате статическая ошибка в замкнутой системе сводится не до нуля, но до весьма малых значений.
, а статическая ошибка , в соответствии с выражением (2.38), стремится к нулю. Поэтому в современных системах электропривода на операционном усилителе обычно реализуют интегрирующее звено (операционный усилитель, охваченный емкостной обратной связью называют интегральным регулятором). В связи с тем, что коэффициент усиления реальных операционных усилителей имеет конечное значение, реальный интегральный регулятор имеет не бесконечное, но достаточно большое значение коэффициента передачи. В результате статическая ошибка в замкнутой системе сводится не до нуля, но до весьма малых значений.
В современных приводах, выполненных в виде замкнутых систем с интегральными регуляторами, удается на нижней скорости обеспечить относительную ошибку не более 10...15% при D=1000...10000.
Если, например, имеется электропривод с диапазоном регулирования D = 10000 и наибольшей (верхней) частотой вращения nВ = 1000об/мин, соответственно,  рад/c, то на нижнем пределе диапазона скорость будет
рад/c, то на нижнем пределе диапазона скорость будет

При этом, чтобы относительная ошибка не превышала 10%, абсолютное падение скорости должно быть не больше
Dnн = 10%×nН = 0,01об/мин;
 .
.
Отсюда видно насколько жесткие требования обеспечиваются в современных широкорегулируемых электроприводах.
2.3.3. Регулирование угловой скорости в системе УП-ДПТ НВ
с отрицательной обратной связью по напряжению
 |
Упрощенная принципиальная схема рассматриваемой системы показана на рис. 2.28 (узел токовой отсечки на схеме не показан, он может быть выполнен так же, как в схеме по рис. 2.25).
Рис. 2.28
Схема отличается от рассмотренной выше с обратной связью по скорости (см. рис. 2.25) только тем, что в ней сигнал обратной связи снимается с потенциометра RP2 и пропорционален напряжению на якоре Uя. Конструктивно система несколько проще предыдущей за счет отсутствия тахогенератора. Регулирование скорости здесь так же осуществляется изменением напряжения на якоре.
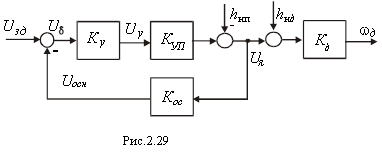
На входе системы (см. также рис. 2.29) сравниваются сигнал задания Uзд и сигнал обратной связи по напряжению на якоре Uосн. Сигнал ошибки
 . (2.40)
. (2.40)
Регулируемой переменной в схеме является напряжение на якоре Uя. Процесс стабилизации Uя протекает следующим образом. Если, например, нагрузка на двигателе возрастает, то ток якоря увеличивается и возрастает падение напряжения в преобразователе. Это ведет к снижению напряжения на выходе УП, поступающего на якорь двигателя,
 ,
,
где Еуп – ЭДС преобразователя;
Rуп – выходное сопротивление преобразователя.
 |
Соответственно, снижается сигнал обратной связи Uосн, а сигнал ошибки Ud (см. уравнение (2.40)) увеличивается. Что, в свою очередь, приводит к возрастанию напряжения на выходе усилителя и напряжения Uя. Обратите внимание, что в схеме стабилизируется не скорость двигателя  , а напряжение на якоре Uя. Очевидно, что при идеальной стабилизации Uя падение скорости от нагрузки будет таким же, как на естественной характеристике при питании двигателя от сети бесконечной мощности.
, а напряжение на якоре Uя. Очевидно, что при идеальной стабилизации Uя падение скорости от нагрузки будет таким же, как на естественной характеристике при питании двигателя от сети бесконечной мощности.
К этому же выводу можно прийти и анализируя алгоритмическую схему системы, показанную на рис. 2.29. На этой схеме, в отличие от рис. 2.26, отдельно показаны помеха нагрузки преобразователя  и помеха нагрузки двигателя
и помеха нагрузки двигателя  . Причем помеха нагрузки двигателя не охвачена цепью обратной связи. Действием отрицательной обратной связи ослабляются только те помехи, которые охвачены цепь обратной связи. Поэтому уравнение для угловой скорости двигателя в замкнутой системе с обратной связью по напряжению записывается в виде (сравните с (2.36))
. Причем помеха нагрузки двигателя не охвачена цепью обратной связи. Действием отрицательной обратной связи ослабляются только те помехи, которые охвачены цепь обратной связи. Поэтому уравнение для угловой скорости двигателя в замкнутой системе с обратной связью по напряжению записывается в виде (сравните с (2.36))
 . (2.41)
. (2.41)
Произведение коэффициентов КуКупКос=Крн – представляет собой коэффициент усиления разомкнутой системы со связью по напряжению. Первый член в уравнении (2.41) – угловая скорость двигателя на холостом ходу; второй – падение скорости от нагрузки преобразователя; третий – падение скорости от нагрузки двигателя.
Очевидно, что выбрав Крн® , можно свести до нуля второй член (получить идеальный преобразователь с нулевым выходным сопротивлением), однако третий член при этом уменьшить не удастся. Падение скорости от нагрузки определяется падением напряжения в якоре двигателя
, можно свести до нуля второй член (получить идеальный преобразователь с нулевым выходным сопротивлением), однако третий член при этом уменьшить не удастся. Падение скорости от нагрузки определяется падением напряжения в якоре двигателя
 .
.
В связи с этим в системе с отрицательной обратной связью по напряжению не удается обеспечить высокую точность стабилизации скорости. Такие системы применяются при нежестких требованиях к допустимой статической ошибке и небольшом диапазоне регулирования (D =5...10).
2.3.4 Регуляторы в системах ЭП
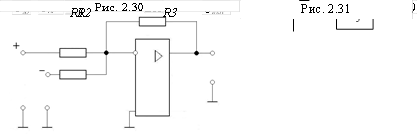
Как уже отмечалось, современные АЭП выполняются в виде замкнутых систем автоматического управления. При этом возникает задача обеспечения устойчивости замкнутой системы и требуемых показателей качества регулирования. Эти задачи решаются введением в систему операционных усилителей, охваченных определенными видами обратных связей. Такие усилители в системах автоматического регулирования принято называть регуляторами. Кроме того, на входе усилителя удобно осуществлять операцию сравнивания электрических сигналов. Схема суммирующего усилителя приведена на рис. 2.30. На инвертирующий вход (на схеме помечен окружностью) DА усилителя подается: через резистор R1 – сигнал задания Uзд; через резистор R2 – сигнал отрицательной обратной связи Uос (например, сигнал обратной связи по скорости двигателя). Известно, что динамические свойства операционного усилителя, охваченного обратной связью, приближенно можно описать передаточной функцией
 , (2.42)
, (2.42)
где  , Zвх(p) – операторное сопротивление обратной связи усилителя и входной цепи, соответственно.
, Zвх(p) – операторное сопротивление обратной связи усилителя и входной цепи, соответственно.
Для рассматриваемой схемы  , для задающего сигнала Zвх(p)=R1, сигнала обратной связи Z1ос(p)=R2. В результате передаточная функция регулятора вырождается в коэффициент передачи. Причем, если R1=R2, то коэффициент передачи по обоим входам усилителя один и тот же
, для задающего сигнала Zвх(p)=R1, сигнала обратной связи Z1ос(p)=R2. В результате передаточная функция регулятора вырождается в коэффициент передачи. Причем, если R1=R2, то коэффициент передачи по обоим входам усилителя один и тот же
 .
.
Напряжение на выходе усилителя
Uвых = UздKу – UосKу = (Uзд – Uос)Kу.
Последнему выражению соответствует алгоритмическая схема, представленная на рис. 2.31. Из нее следует, что рассматриваемая схема обеспечивает сравнение (вычитание) напряжений и усиление сигнала ошибки Uδ=Uзд – Uос. Приведенную схему (см. рис. 2.30) называют пропорциональным регулятором, или сокращенно П-регулятором.
 |
 |
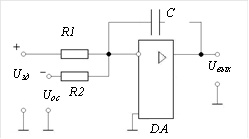
Для уменьшения статистической ошибки, как отмечалось выше, необходимо вводить в систему интегрирующее звено. Схема интегрального регулятора (И-регулятора) приведена на рис. 2.32 (для простоты считаем здесь и далее R1=R2). На основании выражения (2.42) несложно получить передаточную функцию регулятора
 ,
,
где Ти – постоянная времени интегрирующего преобразования.
Передаточная функция соответствует интегрирующему (астатическому) звену.
При скачкообразном изменении сигнала Ud напряжение Uвых линейно нарастает (см. рис. 2.33). Учитывая свойства И-регулятора «накапливать» входной сигнал, можно дать следующие пояснение особенностям работы астатической системы. Если в системе появляется сигнал ошибки, то напряжение на выходе регулятора начинает изменяться и, соответственно, изменяется воздействие на двигатель. Этот процесс продолжается до тех пор, пока сигнал ошибки не будет сведен к нулю, т.е. пока не будет достигнуто равенство
Uос = Uзд.
 Выполнение же этого равенства означает, что регулируемая величина равна заданной, т.е. статистическая ошибка системы сведена к нулю. Отметим, что для сведения статистической ошибки к нулю нужен идеальный И-регулятор. В реальной схеме операция интегрирования выполняется с некоторой погрешностью, поэтому статистическая ошибка в замкнутой системе сводится не до нуля, но, как правило, до достаточно малых значений.
Выполнение же этого равенства означает, что регулируемая величина равна заданной, т.е. статистическая ошибка системы сведена к нулю. Отметим, что для сведения статистической ошибки к нулю нужен идеальный И-регулятор. В реальной схеме операция интегрирования выполняется с некоторой погрешностью, поэтому статистическая ошибка в замкнутой системе сводится не до нуля, но, как правило, до достаточно малых значений.
Алгоритмическая схема регулятора приведена на рис. 2.34. И-регулятор обеспечивает сравнение сигналов Uзд и Uос, а его выходное напряжение пропорционально интегралу от сигнала ошибки.
 |

 |  |
 |
 |
Схема пропорционально-интегрального регулятора (ПИ-регулятора) приведена на рис. 2.35. В цепь обратной связи операционного усилителя последовательно включены резистор R3 и емкость С. На основании выражения (2.42) несложно найти передаточную функцию регулятора
 , (2.43)
, (2.43)
где T =R3×C, Tи = R2×С – соответственно, постоянные времени дифференцирующего и интегрирующего преобразования.
 |

Передаточную функцию (2.43) можно
исать и в другом виде. Деля почленн
Выражение (2.43) можно записать и в другом виде, деля почленно числитель на знаменатель, получим
 ,
,
где K=T/Tи – коэффициент усиления пропорциональной части регулятора. Как следует из последнего выражения, передаточную функцию можно представить в виде суммы пропорциональной части (П) и интегральной (И) части. Отсюда название регулятора. Реакция ПИ-регулятора на скачкообразное изменение сигнала (Uзд - Uoc) приведена на рис. 2.36. Сравнивая рис. 2.34 и рис. 2.36, можно отметить, что ПИ-регулятор в первый момент времени более «энергично» воздействует на управляемый преобразователь и, соответственно, двигатель. Благодаря этому, в принципе, быстродействие системы может быть улучшено.
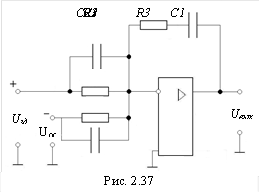
Схема пропорционально-интегрально-дифференциального регулятора (ПИД-регулятора) приведена на рис. 2.37. По сравнению с предыдущей схемой здесь добавлены емкости С2 и С3, включенные параллельно резисторам R1, R2. Иногда емкость включают только параллельно R2. Тогда для сигнала обратной связи схема имеет свойства ПИД- регулятора, а для сигнала задания – свойства ПИ- регулятора.
Используя выражение (2.42), передаточную функцию рассматриваемого регулятора можно записать в виде
 , (2.44)
, (2.44)
где постоянные времени дифференцирования Т1, Т2 и интегрирования Ти определяются соотношениями:
Т1 = R3×C1; T2 = R2×C3; Tи = R2×C1.
![R3 C1,C2,R1,R2,C3]()
![Рис 2.38]()
Раскрыв скобки в числителе (2.44) и деля почленно числитель на знаменатель, получим передаточную функцию ПИД- регулятора в виде
 |  | ||
 , (2.45)
, (2.45)
где K = (T1 + T2)/Tи; T = T1×T2/Tи.
Как следует из последнего выражения, передаточная функция может быть представлена в виде суммы трех слагаемых: первое слагаемое – пропорциональное звено, второе – интегральное, третье – дифференциальное. Это определило название регулятора.
Реакция ПИД-регулятора на скачок сигнала (Uзд – Uос) приведена на рис. 2.38. Можно отметить, что в начальный момент времени при появлении сигнала рассогласования ПИД-регулятор обеспечивает ещё более «энергичное» воздействие, чем ПИ- регулятор (см. рис. 2.36)
Отметим, что описанное влияние различных регуляторов на динамические свойства системы ЭП поясняет лишь качественный характер процессов. Вопрос о выборе того или иного тока регулятора и его параметров, как известно из курса теории автоматического управления, решается при синтезе корректирующих звеньев.
2.3.5 Регулирование угловой скорости в системе генератор-двигатель (Г-Д) с обратной связью по скорости и токовой отсечкой
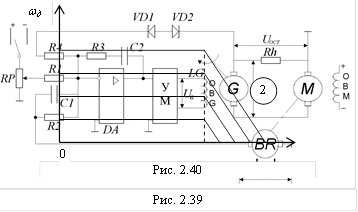
Упрощенная схема системы Г-Д приведена на рис. 2.39. Она содержит двигатель постоянного тока независимого возбуждения М; генератор постоянного тока G, от которого получает питание якорь двигателя; усилитель мощности УМ, к выходу которого подключена обмотка возбуждение OBG генератора; регулятор, выполненный на операционном усилителя DА; задатчик частоты вращения RP; тахогенератор BR; датчик тока якоря – шунт Rh; стабилитроны VD1, VD2. Генератор G приводится в движение приводным (гонным) двигателем (на схеме не показан). На промышленных предприятиях, где имеется сеть переменного тока, в качестве гонного двигателя используется асинхронный короткозамкнутый двигатель. В автономных установках, например, на удаленных буровых установках, судах речного, морского, железнодорожного транспорта и т.п., в качестве приводного двигателя может служить двигатель внутреннего сгорания, паровая или газовая турбина и т.п.
Регулирование угловой скорости двигателя в схеме осуществляется изменением напряжения Uя на якоре двигателя M. Изменение Uя осуществляется за счет регулирование напряжения Uв на обмотке возбуждения генератора. Для согласования между напряжением и мощностью на выходе регулятора с потребной мощностью и напряжением питания обмотки OBG служит усилитель мощности, например, транзисторный усилитель.
Стабилизация скорости двигателя достигается за счет отрицательной обратной связи по скорости. Так, если под действием возмущений wд начинает снижаться, то уменьшается сигнал обратной связи по скорости Uocw, а сигнал ошибки
Ud = Uзд – Uocw
увеличивается. При этом повышается напряжение на выходе регулятора, на выходе УМ и на якоре двигателя. В результате wд стремиться к заданному значению. Точность стабилизации wд, как показано выше, определяется коэффициентом усиления разомкнутой системы. При использовании регулятора, содержащего интегральную составляющую (например, ПИД-регулятор, как на рис. 2.39), удается получить достаточно высокую точность стабилизации (см. первый участок характеристики на рис. 2.40).
Для ограничения тока якоря служит узел токовой отсечки. Один из возможных вариантов его реализации (см. рис. 2.39) включает шунт Rh и стабилитроны VD1, VD2. Этот узел работает также, как описано в п. 2.3.1. Пока ток якоря Iя меньше тока отсечки Iотс, стабилитроны имеют большее сопротивление и не оказывают влияние на работу схемы. Если ток Iя превышает Iотс сопротивление стабилитрона резко снижается и на выход регулятора через резистор R4 начинает поступать дополнительный сигнал (Uост – Uz). При этом сигнал ошибки
Ud = Uзд – Uocw – (Uост – Uz).
 |
По мере увеличения тока якоря Iя растет напряжение Uост. Как следствие, снижается Ud, Uв, Uя, wд. В результате достигается ограничение тока якоря (второй участок характеристик на рис. 2.40)
К достоинствам схемы можно отнести простоту реверса двигателя и реализации рекуперативного торможения. Реверс осуществляется изменением полярности напряжения на задатчике RP, что в конечном счете ведет к изменению полярности напряжения на якоре двигателя. Генераторное торможение с отдачей энергии в сеть возможно, если в качестве гонного двигателя генератора используется электродвигатель, например, асинхронный. Поясним это. Предположим, что машина работает на характеристике 1 (рис. 2.41) в т.а. Чтобы снизить скорость, напряжение на датчике RP снижают, и после переходного процесса машина должна перейти на характеристику 2 в т.b.
Процесс перехода на новую характеристику протекает так. В первый момент времени wд, вследствие механической инерционности привода, остается неизменной (на рис. процесс перехода условно показан стрелками). Напряжение генератора уменьшается и становиться меньше противоЭДС двигателя. Ток в якорной цепи меняет знак.
Рис. 2.41
Машина M теперь работает генератором, а машина G – двигателем и заставляет гонный двигатель вращаться со скоростью выше скорости идеального холостого хода. Последний переходит в режим генератора и отдает электрическую энергию в сеть переменного тока. Если ток якоря превышает по модулю Iост, то в переходном процессе вступает в действие токовая отсечка, и процесс перехода на новую характеристику, от т. с до т. d, идет при токе Iя = |Iотс|. Далее под действием момента сопротивления Мc механизма wд продолжает снижаться до нового установившегося режима в т. b.
Система Г-Д имеет очевидные недостатки. Прежде всего, это большая установленная мощность электрических машин: мощность генератора и гонного двигателя должны быть не меньше мощности двигателя. Т.е. общая установленная мощность электрических машин равна или превышает мощность двигателя в 3 раза. Кроме того, наличие дополнительных вращающихся машин приводит к снижению надежности, значительным затратам на профилактику и ремонт. Значительная инерционность генератора затрудняет достижение высоких динамических характеристик системы.
В связи с этим в настоящее время система Г-Д используется в основном в автономных устройствах, а в промышленных установках, получающих питание от электрических сетей, такая система почти не применяется.
2.3.6. Регулирование угловой скорости в системе управляемый выпрямитель – двигатель постоянного тока независимого возбуждения
(УВ - ДПТ)
В настоящее время в различных областях техники наиболее широко применяются регулируемые электроприводы с ДПТ с управляемыми вентильными (тиристорными) выпрямителями (УВ).
Такие приводы выпускаются промышленностью в виде блочных изделий – комплектных тиристорных электроприводов. В однозонных приводах выход УВ подключается к якорю двигателя и регулирование скорости осуществляется за счет изменения напряжения на якоре ДПТ. В двухзонных ЭП используется два УВ, один работает на якорь, а второй – на обмотку возбуждения, и регулирование угловой скорости осуществляется как изменением напряжения на якоре, так и за счет изменения потока возбуждения (напряжения на обмотке возбуждения).
Остановимся на особенностях регулирования напряжения на якоре и обмотке возбуждения ДПТ НВ с помощью УВ.
Основными приборами, применяемыми в управляемых выпрямителях, являются полупроводниковые вентили - диоды и тиристоры. Общим свойством этих приборов является то, что они могут находиться в двух состояниях - открытом и закрытом. В открытом состоянии прямое падение напряжения на вентилях в 102-103 раз меньше, чем напряжения, выделяемые на других элементах схемы (например, среднее значение прямого падения напряжения на тиристоре меньше 1 В). Ток, протекающий через вентили в закрытом состоянии, в 103-104 раз меньше тока в открытом состоянии. Все это позволяет при анализе электромагнитных процессов считать полупроводниковые вентили идеальными ключами и пренебрегать их прямыми падениями напряжения и обратными токами.
Полупроводниковый диод находится в открытом состоянии при прямом напряжении на его аноде (положительном относительно катода) и в закрытом - при отрицательном.
 Для переключения тиристора в открытое состояние необходимо подать на его управляющий электрод (относительно катода) положительный управляющий импульс при прямом (положительном относительно катода) напряжении на аноде. Длительность управляющего импульса должна быть такой, чтобы за время его действия ток анода тиристора стал больше тока выключения. Для запирания тиристора необходимо уменьшить ток анода до величины тока выключения или приложить к его аноду обратное (отрицательное относительно катода) напряжение. Ток запирания тиристоров в 103-104 раз меньше его прямого тока, поэтому при анализе работы схем можно считать, что тиристор закрывается при нулевом значении тока анода.
Для переключения тиристора в открытое состояние необходимо подать на его управляющий электрод (относительно катода) положительный управляющий импульс при прямом (положительном относительно катода) напряжении на аноде. Длительность управляющего импульса должна быть такой, чтобы за время его действия ток анода тиристора стал больше тока выключения. Для запирания тиристора необходимо уменьшить ток анода до величины тока выключения или приложить к его аноду обратное (отрицательное относительно катода) напряжение. Ток запирания тиристоров в 103-104 раз меньше его прямого тока, поэтому при анализе работы схем можно считать, что тиристор закрывается при нулевом значении тока анода.
2.3.6.1. Однофазный однополупериодный УВ. Фазовый способ регулирования выпрямленного напряжения
Принцип работы УВ поясним на примере простейшей однофазной однополупериодной схемы УВ (рис. 2.42), работающей на активную R нагрузку. В этой схеме VS - тиристор, СИФУ - система импульсно-фазового управления. Тиристор служит для выпрямления и регулирования выпрямленного напряжения на нагрузке. СИФУ предназначена для управления моментом отпирания тиристора.
Фазовый способ регулирования основан на управлении моментом отпирания тиристоров, включенных последовательно между источником переменного
 напряжения и нагрузкой.
напряжения и нагрузкой.
На вход силовой части схемы подается переменное сетевое напряжение uc. На управляющий электрод тиристора подаются управляющие импульсы uу, фаза которых относительно сетевого напряжения определяется величиной входного сигнала uвх СИФУ, а частота - равна частоте питающей сети.
Диаграммы, поясняющие работу схемы, приведены на рис. 2.43, а. На первой диаграмме приведена зависимость сетевого напряжения uс от угла u (здесь и далее u = wt, рад; w=2pfc - угловая частота, рад/сек; fс - частота сетевого напряжения, Гц; t - время, с). Напряжение uс изменяется по синусоидальному закону с периодом 2p:
uc = Um sin u,
где Um - амплитудное значение сетевого напряжения ( ; Uc - действующее значение сетевого напряжения).
; Uc - действующее значение сетевого напряжения).
На второй диаграмме приведены управляющие импульсы uу прямоугольной формы. Амплитуда и длительность импульсов выбирается исходя из условия надежного отпирания тиристора. Импульсы формируются СИФУ при положительном напряжении на аноде тиристора (относительно катода) и сдвинуты относительно сетевого напряжения на угол регулирования a (угол запаздывания). Величина угла регулирования зависит от входного сигнала uвх СИФУ.
На третьей и четвертой диаграммах приведены зависимости мгновенных значений напряжения на нагрузке - ud(u) и тока нагрузки - i(u).
Рассмотрим работу схемы на отдельных интервалах.
Интервал 0£u<a. На этом интервале тиристор закрыт, ток тиристора i(u) и напряжение на нагрузке ud(u) практически равны нулю.
При u=a на управляющий электрод тиристора подается управляющий импульс uу и тиристор открывается. При этом ток анода тиристора i практически мгновенно возрастает и оказывается больше тока выключения, поэтому после окончания управляющего импульса тиристор удерживается в открытом состоянии.
Интервал a£u<p. На этом интервале тиристор открыт, напряжение на нагрузке практически равно сетевому напряжению - ud(u)» uс(u), а ток нагрузки - i(u)=ud /Rн.
Интервал p£u£2p+a. На этом интервале тиристор закрыт, а состояние схемы будет таким же, как и на интервале 0£u<a.
На интервалах 2p£u£4p, 4p£u£6p, ..., 2ip£u£2(i+1)p, где i=0,1,2,..., работа схемы идентична работе на интервале 0£u£2p.
 На рис. 2.43, б приведены диаграммы для случая, когда угол регулирования a имеет большую величину по сравнению с рис. 2.43, а. Как видно из приведенных на рис. 2.43 диаграмм, напряжение на нагрузке имеет вид положительных импульсов, частота которых равна частоте сетевого напряжения.
На рис. 2.43, б приведены диаграммы для случая, когда угол регулирования a имеет большую величину по сравнению с рис. 2.43, а. Как видно из приведенных на рис. 2.43 диаграмм, напряжение на нагрузке имеет вид положительных импульсов, частота которых равна частоте сетевого напряжения.
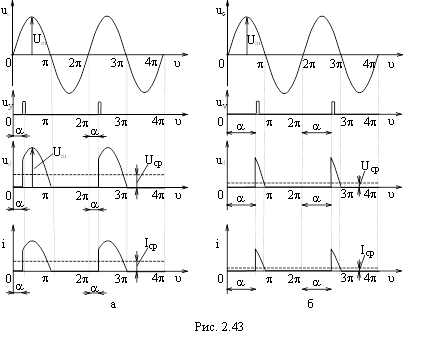 |
Мгновенное значение напряжения на нагрузке ud(a) равно сетевому напряжению uс(a) на интервалах, когда тиристор открыт, и равно нулю на интервалах, когда тиристор закрыт. При работе преобразователя на обмотку возбуждения или якорь ДПТ в качестве выходной переменной УВ рассматривают среднее (за период) значение выпрямленного напряжения Uср (постоянную составляющую выпрямленного напряжения). Геометрически Uср можно определить следующим образом. Построим прямоугольник шириной 2p, площадь которого равна площади фигуры, ограниченной кривой мгновенного напряжения на нагрузке ud и осью абцисс. Высота полученного прямоугольника будет равна среднему значению напряжения на нагрузке. Очевидно, что значение Uср зависит от угла регулирования a. Величина среднего значения напряжения на нагрузке находится из выражения

где  - среднее значение выпрямленного напряжения при угле регулирования a=0.
- среднее значение выпрямленного напряжения при угле регулирования a=0.
Полученное выражение описывает зависимость среднего значения напряжения на нагрузке от угла регулирования a - Uср(a) и представляет собой регулировочную характеристику. Из выражения видно, что при изменении угла a в пределах 0£a£p среднее значение напряжения на нагрузке Uср(a) изменяется в пределах  и уменьшается с увеличением угла регулирования. Последнее иллюстрируется значениями Uср на рис. 2.43.
и уменьшается с увеличением угла регулирования. Последнее иллюстрируется значениями Uср на рис. 2.43.
При активной нагрузке выходное напряжение УВ равно падению напряжения на сопротивлении нагрузки: u(u)=Ri(u). Поэтому среднее значение тока и среднее значение напряжения связаны соотношением

2.3.6.2. Однофазная схема УВ с нулевым диодом
Рассмотрим особенности работы УВ на обмотку возбуждения ДПТ НВ.
Характерной особенностью обмоток возбуждения двигателей постоянного тока является большая (относительно якоря) индуктивность, небольшая потребляемая мощность и небольшой требуемый диапазон изменения тока возбуждения. Мощность, потребляемая обмоткой возбуждения, составляет десятые доли - единицы процента от номинальной мощности электродвигателя, а диапазон регулирования тока возбуждения не превышает 10. В связи с этим для регулирования тока возбуждения чаще всего применяются нереверсивные однофазные управляемые выпрямители. Большая постоянная времени обмотки возбуждения и малый диапазон регулирования тока возбуждения приводят к тому, что управляемые выпрямители работают в области непрерывных токов.
Описываемая схема предназначена для регулирования тока возбуждения двигателя постоянного тока и, следовательно, для регулирования скорости его вращения вверх от номинальной скорости.
На рис. 2.44 приведена упрощенная принципиальная электрическая схема однофазного однополупериодного нереверсивного управляемого выпрямителя с нулевым диодом.
Схема содержит силовой трансформатор Т, тиристор VS, систему импульсно-фазового управления СИФУ, нулевой диод VD и обмотку возбуждения LM.
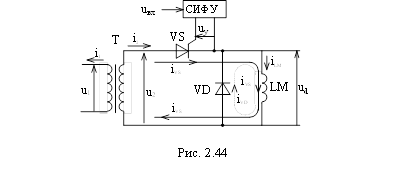
Трансформатор Т служит для получения на вторичной обмотке требуемого действующего значения переменного напряжения, определяющего максимальное значение напряжения на обмотке возбуждения LM, а также для гальванической развязки между сетью и остальной частью схемы. Тиристор VS служит для выпрямления и регулирования среднего (за период) значения выпрямленного напряжения на обмотке возбуждения LM. СИФУ управляет работой тиристора VS. Нулевой диод VD предназначен для устранения отрицательных выбросов напряжения на обмотке возбуждения LM, что позволяет увеличить среднее значение выпрямленного напряжения и тока.
В этой схеме нагрузка (обмотка возбуждения) носит активно-индуктивный характер (RL - нагрузка). Индуктивность L является аккумулятором энергии. При подаче на индуктивность положительного импульса в индуктивности будет запасаться энергия, а ток через нее будет плавно возрастать. По окончании импульса энергия, запасенная в индуктивности, будет отдаваться, а ток при этом будет плавно уменьшаться, не изменяя своего направления. В конечном итоге это приводит к уменьшению пульсаций тока.
Рассмотрим работу схемы на отдельных интервалах (рис. 2.45).
Интервал 0£u<a. В исходном состоянии (u=0) тиристор закрыт. Тогда на интервале 0£u<a тиристор остается в закрытом состоянии, ток анода iVS(u) тиристора равен нулю, а обмотка возбуждения оказывается отключенной от вторичной обмотки трансформатора. Но ток, протекающий через обмотку возбуждения, не равен нулю. За счет энергии, накопленной индуктивностью обмотки возбуждения LM на предыдущем интервале (u<0), ток обмотки возбуждения iLM(u) протекает в направлении, указанном на схеме, через диод VD. Благодаря току диод удерживается в открытом состоянии. При этом напряжение uLM(u) на обмотке возбуждения LM определяется прямым падением напряжения uVD(u)=0 на диоде VD, а ток iLM(u) обмотки возбуждения уменьшается во времени по экспоненциальной зависимости.
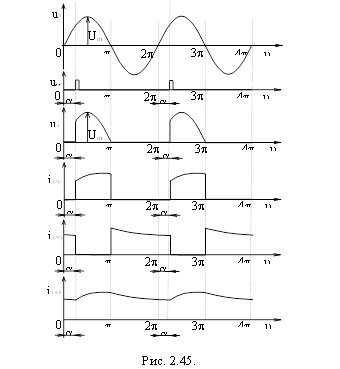 |
Интервал a£u<p. При u=a на управляющий электрод тиристора с СИФУ подается управляющий импульс, тиристор открывается, а напряжение на обмотке возбуждения ud возрастает скачком от нуля до значения u2(a). После снятия управляющего импульса тиристор удерживается в открытом состоянии, т.к. ток анода оказывается больше тока выключения. Под действием напряжения u2 диод VD закрывается и не оказывает влияния на работу схемы.
На интервале a£u£p тиристор находится в открытом состоянии, напряжение на обмотке возбуждения uLM(u) равно напряжению u2(u) на вторичной обмотке трансформатора. К диоду VD приложено обратное напряжение, и он закрыт (ток iVD(u) диода равен нулю). Ток iLM(u) обмотки возбуждения LM возрастает во времени и протекает по цепи: вторичная обмотка трансформатора - тиристор VS - обмотка возбуждения LM - вторичная обмотка трансформатора. На этом интервале в индуктивности обмотки возбуждения запасается энергия.
При p£u напряжение u2, прикладываемое к обмотке возбуждения LM и диоду VD, меняет свой знак на обратный и становится отрицательным. В результате этого открывается диод VD, а к аноду тиристора VS прикладывается обратное напряжение и тиристор закрывается.
Интервал p<u£2p+a. На данном интервале тиристор VS закрыт, а диод VD удерживается в открытом состоянии. Напряжение ud(u) на обмотке возбуждения LM равно прямому падению напряжения uVD на диоде VD, т.е. практически равно нулю. Напряжение uVS(u) на аноде тиристора равно напряжению u2(u) на вторичной обмотке трансформатора Т. Ток iVS(u) через закрытый тиристор VS равен нулю, а ток iLM(u) обмотки возбуждения LM под действием энергии, накопленной ее индуктивностью на интервале a£u£p, протекает через диод и уменьшается по экспоненциальной зависимости.
На последующих интервалах 2p+a£u£3p, 4p+a£u£5p и т.д. работа управляемого выпрямителя совпадает с описанной ранее работой на интервале a£u£p, а на интервалах 3p£u£4p+a, 5p£u£6p+a и т.д. - с работой на интервале p£u£2p+a.
Как видно из рис. 2.45, напряжение ud(u) на обмотке возбуждения LM имеет вид однополярных почти прямоугольных импульсов, частота которых равна частоте питающей сети. Величина напряжения ud(u) при открытом тиристоре VS равна напряжению u2(u) на вторичной обмотке трансформатора и равна нулю при закрытом тиристоре. Среднее за период (2p) значение напряжения Ud (постоянная составляющая напряжения) на обмотке возбуждения LM пропорционально площади, ограниченной кривой напряжения и осью абцисс, и, следовательно, зависит от угла регулирования a. Например, Uср(a) максимально при a=0 и равно нулю при a=p. Таким образом, изменение напряжения Uвх на входе СИФУ приводит к изменению угла регулирования a и, следовательно, к изменению среднего за период напряжения Uср на обмотке возбуждения LM.
Из рассмотренного не сложно заметить, что с точки зрения функционального назначения в управляемом выпрямителе можно выделить два блока (рис. 2.46): СИФУ и блок вентилей (БВ). В рассмотренных схемах БВ состоит из одного тиристора, в более сложных схемах тиристоров несколько.
На функциональной схеме СИФУ показывают в виде прямоугольника. На вход СИФУ поступает напряжение Uвх постоянного тока, что условно показано в верхней части блока. Выходной сигнал СИФУ представляет собой последовательность управляющих импульсов. Причем эти импульсы сдвигаются по фазе в зависимости от Uвх (это условно показано в нижней части блока СИФУ). Для БВ входным сигналом являются импульсы СИФУ, а в качестве выходного сигнала в системах электропривода рассматривают среднее значение выпрямленного напряжения Uср.
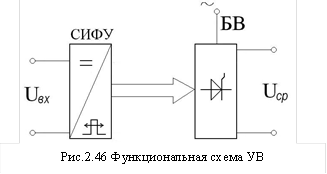 |
Следует обратить внимание на следующее. Как установлено выше, с увеличением угла регулирования a значение Uср снижается. Такая, обратная зависимость Uср(a) весьма неудобна при управлении. В связи с этим СИФУ выполняют так, чтобы ее характеристика «вход – выход» обеспечивала обратную зависимость a( Uвх): при возрастании Uвх угол a уменьшается. В результате для УВ в целом удается получить прямую связь между входным и выходным сигналами. Действительно, при возрастании входного сигнала Uвх УВ угол a будет уменьшаться, а выходной сигнал Uср - увеличиваться.
2.3.6.3 Однофазная двухполупериодная схема УВ с нулевым выводом
Схема однофазного двухполупериодного тиристорного выпрямителя приведена на рис. 2.47. Нагрузкой на рис. 2.47 а является обмотка возбуждения LM ДТП.
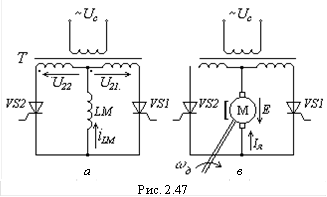
схеме используется трансформатор Т со средней точкой. Вторичные обмотки трансформатора Т включены так, что их напряжения U21, U22 сдвинуты на 180° (находится в противофазе). На управляющие электроды тиристоров VS1, VS2 подаются импульсы, сдвинутые друг относительно друга на 180°.
На рис. 2.48 показаны диаграммы, соответствующие работе схемы на обмотку возбуждения (рис. 2.47 а) с углом a=30°. На первой диаграмме показаны напряжения U21, U22; на второй – управляющие импульсы; на третьей – напряжение на нагрузке.
Работа схемы во многом аналогична предыдущей, поэтому опишем ее более кратко. На интервале 0<v<a ток в обмотке возбуждения поддерживается, как и в предыдущей схеме за счет энергии, накопленной в индуктивности на предыдущем интервале.
 |
Рис. 2.48
При v=a на управляющий электрод тиристора VS1 от СИФУ (на схеме не показана) подается управляющий импульс, тиристор открывается, напряжение на обмотке возбуждения возрастает скачком до значения U21(a). Ток в обмотке возбуждения начинает возрастать во времени и протекает от верхней вторичной обмотки трансформатора через VS1 и LM. В индуктивности обмотки возбуждения запасается энергия.
На интервале p/2<v<p напряжение на нагрузке, равное U21, начинает снижаться. При этом снижается и ток в обмотке возбуждения, а ЭДС самоиндукция меняет свой знак и действует согласно с напряжение U21.
На интервале p<v<p+a знак U21 изменится, однако тиристор VS1 остается в открытом состоянии за счет ЭДС самоиндукции, и цепь протекания тока останется прежней.
При v=p+a подается управляющий импульс на управляющий электрод тиристора VS2. В этот момент потенциал анода тиристора VS2 выше потенциала катода и VS2 открывается. Напряжение на обмотке возбуждения скачком возрастает да значения U22(p+a). При этом к катоду тиристора VS1 прикладывается положительный потенциал и он закрывается. Ток начинает протекать от нижней по схеме обмотки трансформатора через VS2 и LM. Далее процессы в схеме повторяются.
Обратим внимание, что кривая напряжения на обмотке возбуждения имеет как участки, расположенные выше оси абсцисс (+), так и участки, расположенные ниже этой оси (-). При a=30° площадь «положительных» участков больше площади «отрицательных» и, следовательно, среднее значение выпрямляемого напряжения Uср больше нуля. Очевидно также, что если установить a=0, то “отрицательные” участки будут отсутствовать, и Uср будет максимальным. Если же угол управления a увеличится, то площадь «отрицательных» участков будет возрастать, а Uср снижаться. При угле управления a=90° (см. диаграммы на рис. 2.49) площадь «отрицательных» участков становиться равной площади «положительных», а Uср=0.
Продолжая рассуждения, можно заметить, что при a>90° «отрицательные» площадки станут больше «положительных», и, соответственно, среднее значение выпрямленного напряжения поменяет свой знак – станет меньше нуля.
В рассматриваемой схеме такой режим возможен только гипотетически. Действительно, при отрицательном значении Uср среднее значение тока также должно стать отрицательным. Иными словами направление протекания тока должно изменится, а это невозможно в силу односторонней проводимости вентилей.
Рассмотрим работу схемы на якорь двигателя (рис. 2.47, в). Обмотка якоря двигателя так же, как обмотка возбуждения, имеет индуктивность. Поэтому процессы в схеме во много аналогичны рассмотренным для рис. 2.47 а. Основное отличие заключается в том, что при работе ДПТ создает противо ЭДС, направленную встречно выпрямленному напряжению. Если при работе на обмотку возбуждения среднее значение тока в ней определяется выражением
 ,
,
где RLM – сопротивление обмотки возбуждения, то при работе на якорь двигателя среднее значение тока определяется с учетом противо ЭДС
 ,
,
где Rя – сопротивление якорной цепи. При работе на якорь ДПТ и регулировании угла a так же, как в предыдущих схемах, будет изменяться среднее значение напряжение на выходе УВ и, соответственно, изменяться угловая скорость двигателя. Следует иметь в виду, что угловая скорость будет определяться именно средним значением выпрямленного напряжение, т. к. в силу инерционности двигатель практически не реагирует на мгновенные изменения напряжения на выходе УВ.
При углах a<90° энергия поступает из сети переменного тока к якорю и машина работает в двигательном режиме – преобразует электрическую энергию в механическую.
Такой режим работы УВ называют выпрямительным.
Если в рассматриваемой схеме увеличивать угол a от 0 до 90°, то Еср будет меняться от наибольшей до 0, соответственно, и угловая скорость двигателя будет изменяться от наибольшей до нуля.
Если попытаться установить a>90°, то напряжение Uср должно изменить свой знак и, соответственно, должно поменяться направление протекание тока Iя. Как уже отмечалось, ток через тиристоры в обратном направлении протекать не может, следовательно, в рассматриваемом случае работа с a>90° также невозможна.
Рассмотрим другую ситуацию. Предположим, что электропривод работает на грузоподъемный механизм. Пусть происходит подъем груза. Машина М при этом работает в двигательном режиме, УВ – в выпрямительном режиме.
 |
Предположим далее, что груз нужно опустить. Для этого устанавливают угол a>90°. Знак среднего значения напряжения Uср по сравнению с выпрямительным режимом поменяется на противоположный. Под действием момента, создаваемого грузом двигатель начнет вращаться в противоположную сторону. Его противо ЭДС поменяет свой знак. Если по абсолютному значению |E|>|Uср|, то направление
Рис. 2.49
протекания тока останется прежним, а его значение будет определяться выражением
 .
.
Таким образом в рассматриваемой ситуации машина за счет момента, создаваемого грузом работает в генераторном режиме, а электрическая энергия передается от якоря в цепь переменного тока. Говорят, что управляемый выпрямитель работает при этом в инверторном режиме.
Разумеется в автоматизированном ЭП переход УВ в инверторный режим обеспечивается автоматически за счет работы соответствующих блоков системы. Приведенные здесь рассуждение лишь поясняют возможность работы УВ с a>90°, т.е. работы в инверторном режиме.
2.3.6.4 Трехфазные схемы УВ


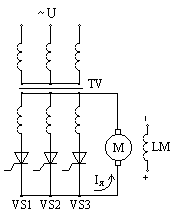 |  | ||
Силовая часть трехфазной нулевой схемы УВП приведена на рис. 2.50.
Трехфазный трансформатор TV1 служит для согласования напряжения на якоре двигателя с сетевым напряжением, а также для гальванической развязки цепи якоря электродвигателя с сетью. Схема содержит тиристоры VS1, VS2, VS3. Вторичные ЭДС различных фаз трансформатора, поступающие на тиристоры, сдвинуты на 120°. Соответственно, и управляющие импульсы, подаваемые на управляющие электроды тиристоров с выхода СИФУ, сдвинуты на 120°. При работе схемы в режиме непрерывного тока ток в каждом из тиристоров протекает в течение 1/3 периода, т.е. в течение 1/3 периода якорь двигателя через один из тиристоров подключается к синусоидальной переменной ЭДС соответствующей фазы. За период изменения напряжения в сети переменного тока якоря двигатель поочередно подключается к трем различным фазам. Регулируя с помощью СИФУ угол a, можно, так же, как в однофазной схеме, изменять среднее значение напряжения на якоре двигателя.
Силовая часть трехфазной мостовой схемы УВ приведена на рис. 2.51. она содержит 6 тиристоров VS1 – VS6. Особенностью этой схемы является то, что управляющие импульсы, подаваемые на тиристоры VS4 – VS6, сдвинуты на 180° по отношению к импульсам на тиристорах VS1 – VS3. Для того, чтобы обеспечить протекание тока в нагрузке, нужно открыть два тиристора одновременно – один в анодной и один в катодной группе вентилей. Одновременность открытия тиристоров анодной и катодной групп обеспечивается тем, что через 60° после основного управляющего импульса на каждый из тиристоров подается дополнительный управляющий импульс.
При работе схемы в режиме непрерывного тока каждый из тиристоров проводит ток в течение 1/3 периода, а напряжение на нагрузке удобно рассматривать как результат взаимодействия двух последовательно включенных нулевых схем выпрямления. Регулирование среднего значения напряжения на якоре двигателя, как и в предыдущих схемах, осуществляется изменением угла управления a.
Как показано выше, напряжение на выходе УВ имеет форму импульсов. Причем пульсации напряжения и, как следует, пульсации тока якоря наиболее значительны в однофазных схемах и существенно снижаются в трехфазных схемах, особенно мостовых. Обычно однофазные схемы УВ применяются при мощности нагрузки до единиц киловатт. Трехфазная нулевая схема в основном используется в диапазоне мощности от единицы до нескольких десятков киловатт. При большой мощности в основном применяется трехфазная мостовая схема.
Необходимо учитывать, что УВП, как потребитель энергии, забирают из сети несинусоидальный ток и, следовательно, является источниками тока высших гармоник.
Высшие гармонические составляющие кривой тока искажают форму напряжения в сети и неблагоприятно влияют на работу конденсаторных установок, синхронных машин и самих УВ. Важнейшим энергетическим показателем электроприемников является коэффициент мощности, характеризующий сдвиг по фазе тока в цепи. В тиристорных преобразователях кривая тока отстает от кривой напряжения, причем, с увеличением угла a фазовый сдвиг увеличивается. Иными словами, УВ потребляет из сети не только активную, но и реактивную мощность. Причем последняя увеличивается при возрастании угла a. Эти обстоятельства требуют принятия специальных мер по повышению коэффициента мощности.
2.3.6.5 Реверсивные электроприводы с УВ
Изменить направления вращения ДПТ НВ (осуществить реверс двигателя) можно за счет изменения полярности напряжения или на обмотке возбуждения, или на якоре двигателя. Первый способ, несмотря на его кажущуюся привлекательность – малую мощность в цепи возбуждения, используется редко. Это связано с тем, что при изменении полярности напряжения на обмотке возбуждения ток в ней снижается до нуля, а затем меняет свой знак. При этом момент двигателя, пропорциональный магнитному потоку обмотки возбуждения, также снижается, достигает нулевого значения, а затем меняет свой знак. Снижение момента затягивает процесс реверса.
 В современных быстродействующих приводах реверс осуществляют изменением полярности напряжения на якоре. Такие приводы содержат два комплекта управляемых преобразователей (см. рис. 2.52), комплект, условно обозначенный “Вперед” – «В», комплект “Назад” – «Н». При разделенном управлении в каждый момент времени работают вентили только одного комплекта.
В современных быстродействующих приводах реверс осуществляют изменением полярности напряжения на якоре. Такие приводы содержат два комплекта управляемых преобразователей (см. рис. 2.52), комплект, условно обозначенный “Вперед” – «В», комплект “Назад” – «Н». При разделенном управлении в каждый момент времени работают вентили только одного комплекта.
 Предположим, что в исходном состоянии работает комплект «В». Полярность напряжения преобразователя и направления ЭДС двигателя E и тока Iя якоря показаны на рис.2.52 Если же включен комплект «Н», то полярнность напряжения на якоре будет противоположной, и двигатель будет вращаться в противоположную сторону.
Предположим, что в исходном состоянии работает комплект «В». Полярность напряжения преобразователя и направления ЭДС двигателя E и тока Iя якоря показаны на рис.2.52 Если же включен комплект «Н», то полярнность напряжения на якоре будет противоположной, и двигатель будет вращаться в противоположную сторону.
В реверсивных приводах при снижении скорости и реверсе двигателя реализуется инверторный режим работы выпрямителя. Поясним это.
Предположим, что в исходном состоянии работает комплект «В» и частоту вращения двигателя необходимо уменьшить. Для этого уменьшают величину задающего сигнала в системе ЭП. В результате напряжение на выходе комплекта «В» начинает резко снижаться и, соответственно, уменьшается ток Iя. В некоторый момент он становиться равным нулю. После этого система управления УВ выдает команду на включение вентилей комплекта «Н». Причем комплект «Н» переводится в инверторный режим (полярность на его выходе для инверторного режима показана в окружностях). При этом ток якоря меняет знак и протекает из цепи постоянного тока в цепь переменного тока. Величина ЭДС комплекта «Н» устанавливается такой, чтоб, ток якоря
 ,
,
не превышал допустимого тока двигателя (тока отсечки). Так организуется режим генераторного торможения двигателя с отдачей энергии в сеть переменного тока (сравните с аналогичным режимом в системе Г-Д).
Следует подчеркнуть, что включение комплекта «Н» в выпрямительном режиме в рассматриваемой ситуации недопустимо. Действительно при таком включении ЭДС двигателя будет действовать согласно с напряжением УВ, и ток якоря

будет недопустимо большим.
При работе же комплекта «Н» в инверторном режиме напряжение на выходе УВ ограничивает ток якоря.
При подходе двигателя к заданной пониженной скорости ток якоря уменьшается, комплект «Н» отключается и вновь вступает в работу комплект «В».
Аналогично протекает процесс реверса двигателя. Только в этом случае, комплект «Н» остается постоянно включенным, угол a постепенно изменяется в сторону уменьшения. При a<90о комплект Н переходит в выпрямительный режим, полярность напряжения на якоре двигателя меняется, и двигатель начинает вращаться в противоположную сторону.
Управление комплектами «В» и «Н» осуществляется автоматически соответствующими блоками тиристорного привода.
2.3.6.6 Системы подчиненного регулирования тока якоря и угловой скорости ДПТ НВ
В рассмотренных выше схемах (см. рис. 2.25, рис. 2.28, рис. 2.39) замкнутых систем ЭП для обеспечения требуемых характеристик используется отрицательная обратная связь по скорости двигателя. Токовая отсечка организуется с помощью дополнительного узла. Причем сигналы с датчика скорости и датчика тока якоря поступают на один усилитель (регулятор). Такой принцип построения системы, как правило, не позволяет получить максимально достижимого быстродействия системы. Кроме того, схема регулятора оказывается в большинстве случаев достаточно сложной (не типовой), что вызывает дополнительные проблемы при наладке системы.
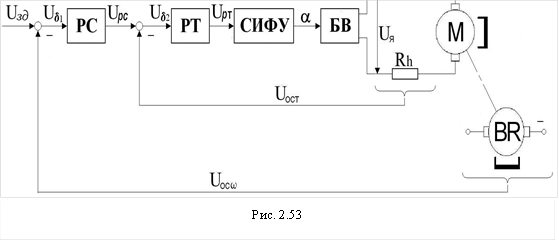
Современные АЭП выполняются в виде систем подчиненного регулирования (СПР) координат. Функциональная схема однозонной системы подчиненного регулирования тока якоря и угловой скорости ДПТ НВ приведена на рис. 2.53. В системе обеспечивается регулирование угловой скорости двигателя за счет изменения напряжения Uя на якоре. Это напряжение регулируется с помощью управляемого выпрямителя, содержащего СИФУ и блок вентилей (БВ).
Система содержит два замкнутых контура: внутренний токовый и внешний скоростной. Внутренний контур включает СИФУ, БВ, датчик тока якоря (шунт Rh) и регулятор тока РТ. Внешний контур охватывает элементы внутреннего и дополнительно содержит якорь двигателя М, датчик скорости (тахогенератор BR) и регулятор скорости.
Поясним работу схемы.
Начнем с внутреннего контура. Он выполнен в виде замкнутой системы с отрицательной обратной связью по току якоря. Входным (задающим) сигналом для этого контура является выходное напряжение Uрс регулятора скорости. На входе РТ осуществляется сравнение (вычитание) сигналов Uрт и сигнала Uост обратной связи по току якоря. Сигнал ошибки на входе РТ
Ud2 = Uрт – Uост.
При постоянном значении Uрс внутренний контур работает в режиме стабилизации тока якоря.
Если, например, ток якоря начинает снижаться, то сигнал Uост также уменьшается, а сигнал ошибки Ud2 увеличивается. При этом увеличивается напряжение на выходе РТ и, как следствие, возрастает напряжение на якоре двигателя – ток якоря начинает возрастать, стремясь к заданному значению.
Рассмотрим работу внешнего, скоростного контура. Сигнал на входе РС определяется соотношением
Ud1 = Uзд – Uocw.
Если wд по каким-либо причинам снижается, то напряжение Uocw тахогенератора так же уменьшается, а сигнал ошибки Ud1 увеличивается. Это приводит к возрастанию напряжения Uрс на выходе РС, т.е. на вход токового контура начинает поступать больший сигнал задания. За счет работы внутреннего контура ток якоря увеличивается и, соответственно, wд растет, стремясь к заданному значению.
Из приведенных рассуждений несложно заметить, что в этой схеме задача регулирования тока якоря подчинена задаче регулирования wд. Отсюда название систем – подчиненного регулирования.
Аналогично протекают процессы при управлении скоростью. Так, чтобы увеличить wд увеличивают напряжение задания Uзд. При этом Ud1 и Uрт увеличиваются, внутренний контур обеспечивает возрастание тока якоря, и двигатель разгоняется до заданного значения скорости.
Упрощенная принципиальная схема СПР тока якоря и угловой скорости ДПТ НВ для нереверсивного ЭП приведена на рис. 2.54.
Регулятор тока в схеме выполнен на операционном усилителе DA2 в виде ПИ-регулятора. Использование ПИ-регулятора позволяет получить максимальное быстродействие токового контура. На вход РТ через резисторы R4 и R5 поступает сигнал с выхода РС – UPC и с выхода датчика тока (шунт Rh) – Uост.
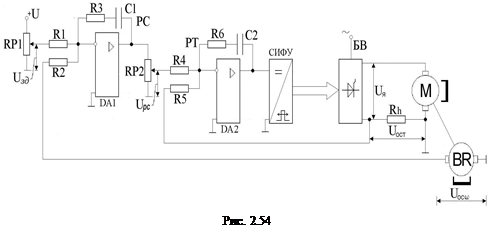 |
Регулятор скорости выполнен на операционном усилителе DA1 в виде ПИ-регулятора. Использование ПИ-регулятора в скоростном контуре придает астатизм системе (см. п. 2.3.2). В астатической системе при использовании идеального регулятора статическая ошибка в поддержании скорости сводится к нулю. На вход РС через R1 поступает сигнал Uзд с датчика скорости (потенциометр RP1) и через R2 – сигнал отрицательной обратной связи Uocw по скорости, снимаемый с тахогенератора. Для настройки значения тока отсечки в схеме предусмотрен потенциометр RP2. Максимальное значение напряжения на выходе РС определяется насыщением усилителя. На вход РТ подается часть выходного напряжения РС, снимаемого с делителя RP2. Перемещая движок RP2, например, вниз можно уменьшать максимальное значение сигнала Uрс. Этот сигнал является задающим для внутреннего токового контура. А его максимальное значение определяет максимальный ток якоря – ток отсечки.
2.3.6.7 Достоинства и недостатки электроприводов с управляемыми выпрямителями
Отметим основные особенности приводов, выполненных по схеме УВ – ДПТ НВ:
1) тиристорный преобразователь имеет очень малую инерционность, что позволяет обеспечить высокое быстродействие электропривода;
2) электропривод имеет высокую надежность, достаточно прост в обслуживании;
3) тиристорный электропривод имеет высокий КПД (более 95%);
4) малые габариты и масса, блочная компоновка привода позволяют сократить требуемые производственные площади, уменьшить капитальные затраты на установку.
Вместе с этой лекцией читают "18 Переломы".
В то же время, тиристорным электроприводам свойственны следующие недостатки:
1) значительные пульсации тока на выходе УВ увеличивают нагрев двигателя и ухудшают его коммутацию;
2) при глубоком регулировании скорости тиристорный электропривод имеет низкий коэффициент мощности;
3) перегрузочная способность тиристорного преобразователя ниже, чем генераторного;
4) при работе тиристорного привода искажается форма кривой напряжения в сети переменного тока и возникают помехи в сети, действующие как на другие электроприемники, так и на сам тиристорный привод;
5) в системе Г-Д преобразовательной установке свойственна естественная рекуперация энергии в сеть в генераторных режимах работы двигателя, в тиристорных преобразователях для обеспечения рекуперации необходимо применение специальных схем, в частности, с двумя комплектами вентилей, что повышает сложность и стоимость электропривода.


















