
Управление координатами в электроприводе постоянного тока с двигателем постоянного тока независимого возбуждения
2.8 Управление координатами в электроприводе постоянного тока с двигателем постоянного тока независимого возбуждения
Из уравнения механической характеристики двигателя постоянного тока:
 ,
,
следует, что управлять механическими координатами можно, применяя следующие способы регулирования:
1) регулирование сопротивлением в цепи якоря (реостатное регулирование);
2) регулирование током возбуждения двигателя (изменением магнитного потока двигателя);
3) регулирование изменением подводимого к двигателю напряжения.
2.8.1 Реостатное регулирование координат при питании якоря от источника ЭДС
Механические характеристики двигателя при реостатном регулировании были рассмотрены ранее при изучении естественных и реостатных характеристик. Поэтому по этому способу пояснений не требуется.
Рекомендуемые материалы
Для регулирования скорости регулировочный реостат в отличие от пускового реостата должен быть рассчитан на длительную работу при номинальном токе нагрузки, т.е. его сопротивления оказываются включенными не только кратковременно во время пуска, но и во время работы двигателя на заданный скорости. Для расчета регулировочного реостата должны быть известны значение скорости, которое нужно получить при определенной величине тока (момента) двигателя.
 Например, при снижении скорости от
Например, при снижении скорости от  до
до  будем иметь:
будем иметь:
 ,
,
 .
.
В этом случае:
Откуда:  (2.43)
(2.43)
Изменение скорости двигателя введением сопротивления в цепь якоря обеспечивает регулирование при постоянном моменте, т. е. в этом случае поток остается неизменным ( ) и ток якоря
) и ток якоря  (по условиям нагрева), т.е.
(по условиям нагрева), т.е.
 .
.
Мощность, потребляемая из сети  , остается неизменной при постоянном моменте нагрузки. Часть этой мощности превращается в механическую мощность на
, остается неизменной при постоянном моменте нагрузки. Часть этой мощности превращается в механическую мощность на  , другая часть ее расходится на потери в соответствии якорной цепи.
, другая часть ее расходится на потери в соответствии якорной цепи.  .
.
Действительно, умножая обе части уравнения электрического равновесия на ток якоря  , получим уравнение баланса мощности в электропроводе постоянного тока
, получим уравнение баланса мощности в электропроводе постоянного тока
 ,
,
т. е.

Принимая
 ,
, 
получим
 ,
,
т.е.
 , (2.44)
, (2.44)
где  - абсолютное значение перепада скорости при заданном моменте М.
- абсолютное значение перепада скорости при заданном моменте М.
Таким образом, при регулировании скорости двигателя изменяем величины добавочного сопротивления в цепи якоря потери мощности в якорной цепи при любом моменте пропорциональны относительному перепаду скорости.
Кроме того, можно отметить ряд других существенных недостатков рассматриваемого способа регулирования скорости. Это зависимость жесткости характеристик от величины дополнительного сопротивления, что не позволяет обеспечивать стабилизацию скорости при колебаниях момента на реостатных характеристиках.

Неблагоприятной особенностью реостатного регулирования следует также считать его ступенчатость. Плавность регулирования можно повышать применением жидкостного реостата, но такое решение находит очень редкое применение. К тому же такое регулирование малоэффективного при малых нагрузках. При номинальных же нагрузках диапазон регулирования скорости может достигать  .
.
Указанные недостатки этого способа, при его простоте, не позволяют широко применять данный способ. Основное применение он находит для крановых электроприводов.
2.8.2 Регулирование координат шунтированием якоря двигателя независимого возбуждения
Получить устойчивую работу двигателя независимого возбуждения при очень малых скоростях можно, применяя способ шунтирования якоря двигателя. Для этого параллельно якорю включают сопротивление  , а последовательно с якорем добавочное сопротивление
, а последовательно с якорем добавочное сопротивление  (рис.2.17). Такая схема применяется в тех случаях, когда необходима точная остановка механизма.
(рис.2.17). Такая схема применяется в тех случаях, когда необходима точная остановка механизма.
Уравнение механической характеристики двигателя при шунтировании якоря может быть получено с помощью уравнений равновесия ЭДС и токов:
 ,
,
 , (2.45)
, (2.45)
 .
.
После преобразования этих уравнений можно получить уравнения электромеханических и механических характеристик для двух случаев:
 ,
,
 ,
,
где  - коэффициент делителя напряжения.
- коэффициент делителя напряжения.
Данные выражения показывают, что механическая характеристика двигателя независимого возбуждения с шунтированием якоря и при наличии  , представляет прямую линию, пересекающую ось ординат в точке, соответствующей
, представляет прямую линию, пересекающую ось ординат в точке, соответствующей  .
.
a)  б)
б) 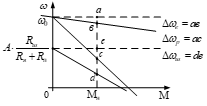

Для естественной характеристики
 ;
;  ;
;  .
.
Для реостатной характеристики
 ;
;  ;
; .
.
При шунтировании якоря
 ;
;  ;
;  .
.
Жёсткость механической характеристики при шунтировании якоря имеют меньшее значение, чем на естественной характеристике, но большее, чем на реостатной характеристике
 ;
;  ;
;  .
.
На рис. 2.18 для сравнения показаны характеристики: естественная, реостатная и при шунтировании якоря.
На рис. 2.19, а и рис. 2.19, б представлены серии механических характеристик двигателя для двух случаев:
 1) при
1) при  и
и  2) при
2) при  и
и  .
.
Рис. 2.19 Механические характеристики двигателя постоянного тока независимого возбуждения при шунтировании якоря
Таким образом, при изменении от 0 до  ¥ все характеристики будут располагаться внутри угла образованного характеристиками при
¥ все характеристики будут располагаться внутри угла образованного характеристиками при  и ¥ и будут пересекаться только в точке B, в которой величина не будет оказывать влияние на режим работы схемы ( на ток в
и ¥ и будут пересекаться только в точке B, в которой величина не будет оказывать влияние на режим работы схемы ( на ток в  ). Это может иметь место только в точке, где напряжение на зажимах якоря будет равно нулю, т.е.
). Это может иметь место только в точке, где напряжение на зажимах якоря будет равно нулю, т.е.
 .
.
В этом случае ток пойдёт только через якорь и последовательное сопротивление  . Значение тока будет определяться приложенным напряжением и сопротивлением , т.е.
. Значение тока будет определяться приложенным напряжением и сопротивлением , т.е.  .
.
Сопротивление  не оказывает при этом никакого влияния на ток, т.к. на зажимах якоря
не оказывает при этом никакого влияния на ток, т.к. на зажимах якоря  . Другая координата точки B может быть найдена после подстановки
. Другая координата точки B может быть найдена после подстановки  в уравнение
в уравнение
 ;
;  . (2.48)
. (2.48)
В этой точке B двигатель будет работать в режиме противовключения.
Рассмотрим второй случай при  и
и  .
.
В предельных случаях будем иметь:
-  ,
,  характеристика будет иметь вид естественной характеристики
характеристика будет иметь вид естественной характеристики
 ;
;
-  ¥,
¥,  - двигатель будет включен по схеме динамического торможения
- двигатель будет включен по схеме динамического торможения
 ;
;
- при промежуточных значениях  ¥, характеристика будет иметь вид, представленный на рис. 2.19, а.
¥, характеристика будет иметь вид, представленный на рис. 2.19, а.
Координаты точки А могут быть найдены по выражениям
 и
и  . (2.49)
. (2.49)
Регулирование координат шунтированием якоря обеспечивает более широкий диапазон регулирования, чем реостатный способ, т. к. механические характеристики имеют большую жесткость, чем реостатные характеристики. Данный способ позволяет получить низкие скорости при регулировании в отличие от реостатного регулирования. Скорости двигателя регулируются ступенчато вниз от основной. Способ менее экономичный, чем реостатный из–за больших потерь за счет шунтирования цепи якоря. Способ применяется для кратковременных работ в основном для обеспечения точного останова.
Анализ показывает, что в схеме с шунтированием якоря возможен режим рекуперации энергии, соответствующий условию  при скоростях
при скоростях  , т.е. рекуперация энергии имеет место при скоростях, превышающих скорость идеального холостого хода на естественной характеристике.
, т.е. рекуперация энергии имеет место при скоростях, превышающих скорость идеального холостого хода на естественной характеристике.
 В интервале скоростей
В интервале скоростей  при
при  механическая энергия, преобразуемая электрической машиной в электрическую, рассеивается на резисторе .
механическая энергия, преобразуемая электрической машиной в электрическую, рассеивается на резисторе .
Построим следующие характеристики: естественную (кривая 1), реостатную (кривая 2), при шунтировании якоря (кривая 3)
и характеристику динамического торможения (кривая 4), параллельную естественной. Рассмотрим возможные режимы работы двигателя в этой схеме. В точке А  ,
, 
 . В точке В
. В точке В  ,
,  ,
,  ,но противоположны по знаку, т.е. машина работает в генераторном режиме. На различных участках механической характеристики двигатель независимого возбуждения с шунтированием якоря может работать в различных режимах.
,но противоположны по знаку, т.е. машина работает в генераторном режиме. На различных участках механической характеристики двигатель независимого возбуждения с шунтированием якоря может работать в различных режимах.
В IV квадранте двигатель работает в режиме противовключения и питает шунтирующий контур ( ). В точке А будет иметь место чистый режим противовключения, т.к.
). В точке А будет иметь место чистый режим противовключения, т.к.  . На участке AD – режим противовклкючения с питание шунтирующего контура от сети. На участке CD машина работает в двигательном режиме с питанием якоря и шунтирующего сопротивления от сети. Точка С (
. На участке AD – режим противовклкючения с питание шунтирующего контура от сети. На участке CD машина работает в двигательном режиме с питанием якоря и шунтирующего сопротивления от сети. Точка С ( ) – идеальный холостой ход двигателя (
) – идеальный холостой ход двигателя ( ). В этом режиме и питаются сетью, причём
). В этом режиме и питаются сетью, причём  . Участок ВС – динамическое торможение с питанием шунтирующего контура от сети и от двигателя. Точка В – режим чистого динамического торможения (
. Участок ВС – динамическое торможение с питанием шунтирующего контура от сети и от двигателя. Точка В – режим чистого динамического торможения ( ). Участок выше точки В – рекуперативное торможение с отдачей энергии в сеть и питанием контура от якоря двигателя.
). Участок выше точки В – рекуперативное торможение с отдачей энергии в сеть и питанием контура от якоря двигателя.
2.8.3 Регулирование координат изменением тока возбуждения двигателя независимого возбуждения
Этот способ является одним из наиболее простых и экономичных способов, поэтому находит широкое применение. Это объясняется тем, что мощность цепи возбуждения на один – два порядка меньше мощности машины.
Обычно нормальные машины изготавливаются всегда с некоторым насыщением магнитной цепи, поэтому увеличение тока возбуждения против номинального не вызывает значительного увеличения магнитного потока. Поэтому регулирование этим способом осуществляется только уменьшением магнитного потока в сторону повышения скорости против номинальной.
Уравнение механической характеристики:
 .
.
Характеристикам при изменении тока возбуждения соответствуют различные значения скорости идеального холостого хода  и перепада скорости
и перепада скорости  , которые определяются по формулам:
, которые определяются по формулам:
 ;
;  .
.
Следовательно, с уменьшением магнитного потока наклон механической характеристики увеличивается, т.е. жесткость характеристик снижается
 .
.
Электромеханическое и механическое регулирование характеристиками представлены на рис. 2.21, а, б.
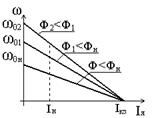
а) б)

Как указывалось ранее, при коротком замыкании имеем неизменный ток короткого замыкания независимый от величины магнитного потока  и момент короткого замыкания
и момент короткого замыкания  , зависящий от магнитного потока двигателя.
, зависящий от магнитного потока двигателя.
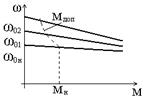
Данное регулирование является экономичным, осуществляемым при номинальной мощности и при моменте, изменяющемся по гиперболической зависимости в функции скорости. Поэтому полному использованию двигателя при регулировании соответствует  . Допустимый момент двигателя снижается при уменьшении магнитного потока.
. Допустимый момент двигателя снижается при уменьшении магнитного потока.

Поэтому допустимому моменту  при ослаблении магнитного поля соответствуют точки, лежащие на гиперболической кривой допустимого момента
при ослаблении магнитного поля соответствуют точки, лежащие на гиперболической кривой допустимого момента  (пунктирная линия). При работе двигателя на скоростях с моментом, значение которого лежит правее пунктирной кривой, двигатель будет перегружен, а левее - недогружен. При постоянном моменте сопротивления
(пунктирная линия). При работе двигателя на скоростях с моментом, значение которого лежит правее пунктирной кривой, двигатель будет перегружен, а левее - недогружен. При постоянном моменте сопротивления  и длительной нагрузке. необходимо выбрать двигатель так, чтобы при наибольшей скорости ток в якорной цепи был примерно равен номинальному. При пониженных скоростях в этом случае двигатель будет недогружен, т.к. ток в якоре становится меньше номинального из-за возрастания магнитного потока.
и длительной нагрузке. необходимо выбрать двигатель так, чтобы при наибольшей скорости ток в якорной цепи был примерно равен номинальному. При пониженных скоростях в этом случае двигатель будет недогружен, т.к. ток в якоре становится меньше номинального из-за возрастания магнитного потока.
Регулирование тока возбуждения двигателя может быть выполнено либо с помощью регулируемого возбудителя, либо с помощью регулируемого сопротивления в цепи возбуждения при его питании от сети. Расчёт этих сопротивлений для получения необходимого ослабления поля двигателя производится с использованием кривой намагничивания, указываемой в специальных справочниках. При их отсутствии ориентировочно можно пользоваться данными универсальной кривой намагничивания для двигателей независимого возбуждения.
|
| 0,05 | 0,2 | 0,375 | 0,65 | 0,82 | 0,87 | 0,92 | 1,0 | 1,05 |
|
| 0 | 0,1 | 0,4 | 0,5 | 0,6 | 0,7 | 0,8 | 1,0 | 1,2 |


Расчёт регулировочного сопротивления  может быть выполнен следующим образом.
может быть выполнен следующим образом.
В соответствии с заданным диапазоном регулирования скорости, может быть определена максимальная скорость  . Минимальная и максимальная скорости определятся следующими выражениями
. Минимальная и максимальная скорости определятся следующими выражениями
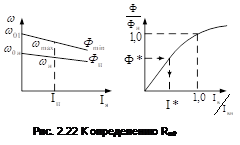

Находится требуемое значение  по кривой намагничивания по полученному значению
по кривой намагничивания по полученному значению  и рассчитывается требуемое значение тока возбуждения
и рассчитывается требуемое значение тока возбуждения
 .
.
Производится расчёт регулировочного сопротивления
 .
.
Уменьшение тока возбуждения и верхний предел скорости определяются условиями безыскровой коммутации. Значительно повысить скорость этим способом можно только для специально рассчитанных двигателей. Нормальным двигателем можно регулировать скорость вверх только на 25 – 30 % выше номинальной скорости, а в двигателях, предназначенных для регулирования скорости, она может повышаться в 2-3 и даже в 8 раз по сравнению с номинальной скоростью.
Диапазон регулирования скорости таких двигателей от 1,5:1 до 4:1. Пределы регулирования ограничиваются как условиями нормальной коммутации, так и необходимостью повышения механической прочности якоря двигателя.
Способ экономичен, обеспечивает высокую плавность регулирования при постоянстве мощности. Скорость регулируется только вверх от основной.
Данный способ применяется широко в приводах, где требуется регулирование при постоянной мощности.
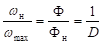
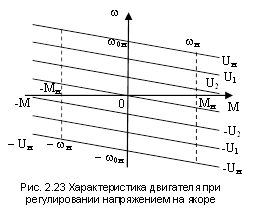
2.8.4 Регулирование координат двигателя независимого возбуждения изменением подводимого к якорю напряжения
Это естественный, энергетически эффективный способ регулирования координат. Электромеханические и механические статические характеристики привода при таком регулировании показана рис. 2.23. Из механических характеристик следует, что перепад скорости постоянный и не зависит от напряжения. Поэтому механические характеристики параллельны. Действительно, можно записать для различных напряжений:
 ,
,
 .
.
Отсюда
 .
.
Считая, что максимальная скорость соответствует номинальному напряжению  , а минимальная – минимальному значению напряжения, можно получить для возможного диапазона регулирования скорости:
, а минимальная – минимальному значению напряжения, можно получить для возможного диапазона регулирования скорости:
 .
.
Для разомкнутых систем регулирования диапазон регулирования скорости может достигать  , а для замкнутых -
, а для замкнутых -  и более. Плавность регулирования определяется плавностью изменения напряжения питания (
и более. Плавность регулирования определяется плавностью изменения напряжения питания ( ).
).
КПД двигателя без учета потерь на возбуждение равен отношению фактической скорости к скорости идеального холостого хода:
 .
.
Потери в якоре при  будут постоянными при регулировании скорости. Но т.к. мощность на валу двигателя
будут постоянными при регулировании скорости. Но т.к. мощность на валу двигателя  уменьшается при снижении
уменьшается при снижении  , снижается при этом и КПД.
, снижается при этом и КПД.
Регулирование скорости осуществляется вниз от основной при  . Для регулирования скорости изменением напряжения требуется управляемый преобразователь. При питании от преобразователей:
. Для регулирования скорости изменением напряжения требуется управляемый преобразователь. При питании от преобразователей:
 . (2.51)
. (2.51)
Откуда механическая характеристика двигателя
 . (2.52)
. (2.52)
Из приведённого уравнения следует, что с изменением  осуществляется регулирование только скорости идеального холостого хода
осуществляется регулирование только скорости идеального холостого хода
Ещё посмотрите лекцию "2 Национальное и международное право во взаимосвязи" по этой теме.

тогда как жёсткость механических характеристик при неизменных параметрах цепи якоря сохраняется. При этом механические характеристики представляют собой семейство параллельных друг другу прямых (рис. 2.23).Модуль жёсткости механической характеристики
 .
.
Однако в зоне низких скоростей жёсткость характеристик оказывается значительно большей, чем при параметрическом способе регулирования скорости. Достоинством этого способа является также то, что для изменения необходимо воздействие на цепи управления, мощности которых значительно меньше, чем мощность главных цепей двигателя.
Регулирование скорости в рассматриваемом случае осуществляется при  . Поэтому регулирование осуществляется при допустимой нагрузке
. Поэтому регулирование осуществляется при допустимой нагрузке  и
и  . Следовательно, регулирование скорости осуществляется вниз от основной при
. Следовательно, регулирование скорости осуществляется вниз от основной при  .
.
В качестве управляемого преобразователя может быть использован генератор постоянного тока (в системе Г-Д), тиристорный преобразователь в системе ТП-Д и др. В качестве примера рассмотрим систему “генератор-двигатель”.



















