
Кинестетические датчики
ГЛАВА 3. Кинестетические датчики
Самым распространенным типом датчиков, используемых в робототехнике и мехатронике, являются кинестетические датчики. Решение любых задач, связанных с контролем линейных и угловых параметров перемещения, обеспечением заданной скорости движения невозможно без датчиков этой группы. По оценке автора, свыше 70% информационных устройств современного промышленного производства реализуют кинестетические функции. Кинестетические сенсоры по типу входного воздействия разделяются на три группы:
· датчики положения и перемещения;
· датчики скорости;
· датчики усилий и акселерометры.
3.1. Датчики положения и перемещения
Датчиком положения и перемещения (ДПП) называется устройство, воспринимающее контролируемое положение и/или перемещение объекта (линейное или угловое) и преобразующее его в выходной (обычно, электрический) сигнал, удобный для дальнейшей обработки, хранения или передачи по каналу связи. Существует два основных метода определения положения и измерения перемещений. В соответствии с первым, датчик вырабатывает сигнал, являющийся функцией положения одной из его частей, связанных с подвижным объектом, а изменение этого сигнала характеризует перемещение этого объекта. В соответствии со вторым методом датчик формирует импульс на каждое элементарное перемещение, и суммарное положение определяется суммой всех элементарных перемещений. Информативным параметром датчиков первой группы, получивших название абсолютных, является изменение электрического импеданса - сопротивления, индуктивности или емкости в функции положения подвижного элемента датчика. Преобразователи второй группы называются датчиками последовательных приращений или относительными.
 К ДПП робототехнических и мехатронных систем обычно предъявляются следующие требования:
К ДПП робототехнических и мехатронных систем обычно предъявляются следующие требования:
· точность (полная погрешность - не более 1%);
Рекомендуемые материалы
· быстродействие (определяемое через минимальную частоту опроса - не менее 50 Гц);
· надежность (доверительная вероятность - не менее 0,9);
· помехоустойчивость;
· технологичность;
· низкая стоимость.
ДПП можно классифицировать по пяти основным признакам на следующие группы:
1. По измеряемому параметру: линейные и угловые.
2. По принципу действия: резистивные, электромагнитные, фотоэлектрические (оптоэлектронные) и электростатические (емкостные).
3. По структуре построения: последовательные, дифференциальные и компенсационные или уравновешиваемые (рис. 3.1а - 3.1в соответственно).
4. По характеру изменения выходного сигнала: непрерывные (амплитудные, частотные, фазовые) и дискретные (амплитудно-, частотно-, и кодоимпульсные).
5. По принципу считывания сигналов: абсолютные и циклические.
В соответствии с ГОСТ 20964-75 и 20965-75 устанавливаются шесть классов точности ДПП. Для датчиков угловых перемещений при поворотах в пределах 3600 допускаемая систематическая погрешность для 1 класса точности не должна превышать 50’’, для 6-го - 1’’. Для датчиков линейных перемещений задаются 15 интервалов координатных перемещений. Шесть наиболее высоких классов точности таких ДПП представлены в таблице 3.1.
Таблица 3.1. Классы точности ДПП
| Интервал перемещения, мм | Предел допускаемой систематической погрешности, мкм 1 2 3 4 5 6 | |||||
| 10 ... 32 | 12 | 6 | 3 | 1,5 | 0,5 | 0,3 |
| 32 ... 125 | 16 | 8 | 4 | 2 | 1 | 0,5 |
| 125 ... 200 | 18 | 9 | 5 | 2,5 | 1 | 0,5 |
| 200 ... 320 | 20 | 10 | 5 | 3 | 1,5 | 0,8 |
| 320 ... 500 | 25 | 12 | 6 | 3 | 1,5 | 0,8 |
3.1.1. Резистивные датчики положения
Резистивный датчик положения (РДП) представляет собой включенный по схеме делителя напряжений резистивный ЧЭ, информативный параметр которого - сопротивление регулируется положением подвижного контакта.
РДП относятся к преобразователям с абсолютным отсчетом - их функция преобразования монотонна и непрерывна. Датчики этого типа не требуют подсчета полных циклов измерения. Благодаря этому, кратковременная потеря информации не приводит к накоплению погрешности.
РДП классифицируются по следующим признакам:
1. По типу ЧЭ: проволочные (реостатные) и пленочные.
2. По траектории перемещения скользящего контакта: линейные, круговые (amax < 360o) и геликоидальные (amax > 360o).
3. По способу съема сигнала: контактные и бесконтактные.
Конструктивно РДП выполнен в виде потенциометра с подвижным движком. В большинстве случаев движок механически связан с потенциометром и представляет собой скользящий контакт. В некоторых моделях контакт заменен оптической или магнитной связью. На рис. 3.2 представлены схемы кругового и линейного РДП.
Сопротивление РДП в процессе работы изменяется по закону:
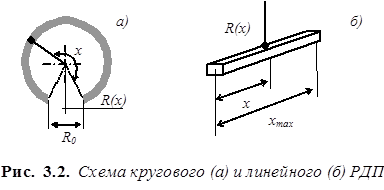

где R0 - сопротивление РДП,  - относительное перемещение движка.
- относительное перемещение движка.
Простейшими РДП являлись реостаты или системы Рустрата. Они состояли из константановой или никелиновой проволоки, навитой на корпус, по которой перемещался медный ползунок. Элемент сопротивления современных РДП также выполнен в виде проволоки, обладающей малым температурным коэффициентом сопротивления aR, малой термоЭДС и коррозионной стойкостью. Таким требованиям удовлетворяют материалы на основе константана (Cu-Ni-Mn), манганина и других медно-никелевых сплавов, нихрома. Витки проволоки изолированы друг от друга эмалью, открыта лишь та часть проволоки, по которой скользит контакт. Другим типом элемента сопротивления являются проводящие углеродные пленки (размер зерен ~ 0,01 мм).
РДП используются в измерительных системах как постоянного, так и переменного тока. При этом во втором случае, для проволочных РДП проявляется реактивная составляющая сопротивления обмотки, обусловленная индуктивностью и межвитковой емкостью.
Включение РДП в цепь осуществляется по схеме делителя напряжения (со средней точкой или без нее). В этой схеме РДП сопротивлением R0 подключается к источнику ЭДС Eи, с собственным сопротивлением Rи (рис. 3.3).
В общем случае, напряжение на выходе РДП Uвых, подаваемое на следующий каскад преобразователя (например, ИУ), с входным сопротивлением Rн равно:
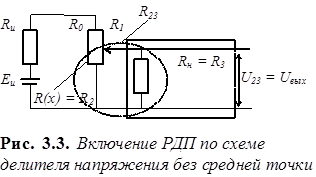
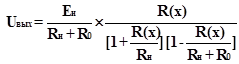
В частном случае, при питании датчика от источника напряжения (Rи = 0), имеем Eи = Uи. При этом выходной сигнал РДП Uвых = U23 пропорционален сопротивлению R23 (образованному частью РДП R(x) = R2 и нагрузкой Rн = R3):
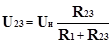
где  . Запишем:
. Запишем: 
Тогда, при отсутствии нагрузки на РДП R3 =¥, R0=R1+R2, и поэтому Uвых /Uи » R2/R0, и, следовательно, зависимость U2 от R2 - линейна.
В линейной схеме делителя напряжения (с параметрами R0, Uи, R3) относительное перемещение c подвижного контакта резистора R0 меняется от 0 до 1. Функция преобразования РДП в относительных единицах Uвых= U23 = f(c) определяется из выражения:

Зависимость напряжения Uвых от R2 при наличии нагрузки нелинейна. Обозначим R2 = cR0, R1 = (1-c) R0. Тогда:
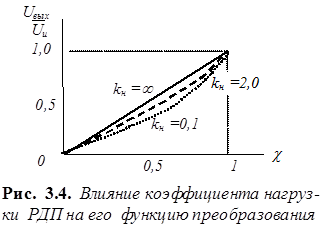
Вводя понятие коэффициента нагрузки kн = R3/R0 получим (рис. 3.4):
Следовательно, функция преобразования нагруженного РДП примет окончательный вид: 
Заметим, что функции преобразования существенно зависит от коэффициента нагрузки и меняется в процессе перемещения движка РДП.
Характеристики РДП разделяют на две группы: эксплуатационные и метрологические.
К первым относятся: номинальное сопротивление R0 (обычно 0,1 ... 100 кОм ), допуск на номинал DR0 (± 1%), максимальная частота входного воздействия fmax (до 1 кГц ) и срок службы (измеряется в циклах полного преобразования: 106 циклов для реостатного РДП, 108 - для пластикового).
Среди метрологических характеристик выделяют: погрешность нелинейности eнл, разрешающая способность (погрешность нечувствительности eнч), погрешность люфта eл и погрешность вследствие шума сигнала. В соответствии со значением полной погрешности РДП отечественные модели, используемые в робототехнике, принято разделять на три класса точности (табл. 3.2).
Таблица 3.2. Классы точности отечественных РДП
| Класс точности | I | П | Ш |
| Погрешность, % | + 0,25 | + 0,5 | + 1,0 |
Рассмотрим основные характеристики РДП, а также их влияние на свойства системы управления более подробно. Так, например, точность системы управления, практически не зависит от допуска DR0 на номинальное значение сопротивления РДП. В типовых режимах включения РДП измеряет лишь приращение сопротивления, следовательно, точность определяется, главным образом, линейностью функции преобразования.
Одним из важнейших параметров РДП является максимальная скорость перемещения движка, определяющая верхний частотный предел входных воздействий - частоту среза РДП. Рассмотрим линейный РДП, и, для простоты расчета допустим, что, движок совершает в окрестности положения равновесия l0 синусоидальное движение с амплитудой 1l = l0 + l1 sin wt. (w= 2pf). Следовательно, для максимальной скорости будет справедливо выражение:
 ,
,
Очевидно, что данное значение должно быть меньше заданного максимума Vmax, и тогда:
f < Vmax/2p l1.
(Например, для типичных значений Vmax = 2 м/с, l1= 0,3 мм, получим f < 1,1 кГц). Аналогично, для круговых РДП получим:
f < 3600 Nmax/2p a1
где a1 - амплитуда перемещений в градусах. (При Nmax = 40 об/с, a1 = 2о, f < 1,1 кГц).
Частотные электрические свойства определяются реактивными составляющими сопротивления. Постоянная времени t не зависит от частоты f и при w <<w0 равна:

где w - круговая частота переменного тока, L, C - соответственно межвитковая индуктивность и емкость,  - собственная круговая частота РДП.
- собственная круговая частота РДП.
Проволочные низкоомные (до 10 кОм) РДП имеют постоянную времени t ~ 10-6 ... 10-7 c, высокоомные ~10-4 ... 10-5 c и не используются при частотах сети выше 10 ... 50 кГц. На таких частотах применяются пленочные датчики.
 Погрешность нелинейности (мультипликативная составляющая полной погрешности) обусловлена отклонением отношения Uвых/Uи нагруженного датчика от ненагруженного. Величина относительной погрешности eнл равна:
Погрешность нелинейности (мультипликативная составляющая полной погрешности) обусловлена отклонением отношения Uвых/Uи нагруженного датчика от ненагруженного. Величина относительной погрешности eнл равна:
Значение eнл, а, следовательно, чувствительность РДП зависит от величины относительного перемещения движка и сопротивления нагрузки. Наибольшее отклонение реальной кривой от идеальной имеет место при c= 2/3:
 .
.
(Например, для Rн > 100 R0, eнлmax не превышает 0,15%, а при Rн = 2 R0 она составляет 17%).
Линеаризация достигается двумя способами: включением резистора R* последовательно РДП (рис. 3.5а), или R* = R3 параллельно верхнему плечу РДП (рис. 3.5б). В первом случае, обозначив  , получим:
, получим:  . Оптимальная линеаризация достигается при k = 1,5.
. Оптимальная линеаризация достигается при k = 1,5.
Разрешающая способность РДП характеризуется зоной нечувствительности D, равной: D = xmax/n, где xmax - диапазон измерения (линейный или угловой) РДП, n - число витков. Для проволочных РДП разрешение D, определяется максимальным перемещением, необходимым для перехода движка из своего положения в ближайшее соседнее. Оно зависит от формы и толщины проволоки, размеров движка и меняется по мере их износа. (Для увеличения разрешающей способности РДП используют проволоку малого диаметра, правда это приводит к более быстрому износу). В абсолютном измерении для лучших линейных РДП D ~ 10 мкм.
 Величина погрешности нечувствительности eнч проволочного РДП определяется выражением:
Величина погрешности нечувствительности eнч проволочного РДП определяется выражением:
eнч = DR/R0
где DR - минимальная величина изменения сопротивления РДП.
Значение eнч для РДП с проволочными ЧЭ составляет ~ 0,1 ... 3%, достигая для прецизионных моделей ~ 0,002%. Зона нечувствительности зависит от количества витков проволоки, замыкаемых движком, которое, даже в лучших моделях изменяется по длине датчика (рис. 3.6). Поэтому, функция преобразования РДП будет «ступенчатой», причем размеры ступенек неодинаковы. Это приводит к расширению полосы погрешностей за счет дополнительной нелинейности. Учитывая это обстоятельство, получим: DR = R0/2n, и следовательно
 (eнч ) min = 1/2n
(eнч ) min = 1/2n
В целом аддитивная погрешность РДП оценивается значением 1/n … 2/n.
Дискретность функции преобразования проволочных РДП составляет для однооборотного типа ПТП-1 -150 мВ, для геликоидального двадцатиоборотного типа ППМЛ -10 мВ.
Наилучшее разрешение обеспечивают полосковые РДП, имеющие мелкозернистую структуру. (Для них погрешность нечувствительности составляет ~ 0,1 мкм).
Для увеличения разрешающей способности РДП используют рычажный привод, увеличивающий масштаб перемещения движка (рис. 3.7).
Люфт РДП обусловлен зазором между движком и осью датчика. В первом приближении справедливо:
 DR = R0 d/gr,
DR = R0 d/gr,
где d - радиальный зазор между осью и втулкой, r - длина движка, g - угол дуги, занимаемый обмоткой. Тогда, погрешность люфта eл будет равна:
eл= DR/R0 = d/gr
Для уменьшения величины eл в конструкциях РДП используются осевые подшипники (например, в отечественных моделях СП5-21, СП4-8).
Шумы РДП обусловлены как свойствами ЧЭ датчика, так и наводками в измерительной цепи датчика. В первом случае - это аддитивная помеха, обусловленная изменением сопротивления РДП при перемещении движка. Она является следствием разнородности структуры ЧЭ в зоне контакта, вибраций и т.д. Запишем: Uвых(x) = Uсигн(x) + u(x), причем u(х) = Rш(x) i. Здесь Uсигн(x) - напряжение «чистого» сигнала, u(x) - составляющая шума, i - ток через подвижный контакт (i обычно не более 1 мА), Rш(x) - шумовое сопротивление РДП.
Допустимый уровень шума РДП указывается в паспорте на датчик. Например, для однооборотного РДП типа СП4-8 u(х) составляет 2 мВ. Величина Rш полосковых РДП существенно больше, чем проволочных и достигает 2%. Наличие шумов РДП, приводит к большим погрешностям при дифференцировании сигналов (например, при определении скоростей). Для их уменьшения, разрабатываются бесконтактные пленочные схемы с полосой из фотопроводящего слоя. Такие датчики (рис. 3.8), выпускаются в настоящее время многими фирмами (например, Segor, Франция и др.) Резистивный слой фотопотенциометра представляет собой пластинку, покрытую тонким слоем сернистого кадмия. Принцип действия РДП основан на внутреннем фотоэффекте. При освещении поверхности пластины образуется проводящая перемычка, сопротивление которой на несколько порядков ниже сопротивления затененных участков фоточувствительного слоя. Потенциал резистивного слоя снимается в точке х, и, следовательно, выходное напряжение является функцией координаты светового пятна. Если сопротивление нагрузки Rн >> Rосв, то данный прибор работает как обычный потенциометр. (Rосв - сопротивление освещенного участка). Чувствительность (крутизна) фотопотенциометра S составляет ~ 10 … 50 мВ/мм, при световой чувствительности Sс = Rосв/Rтем достигающей 106. Недостатком РДП этого типа является низкое быстродействие t ~ 1 … 5 мс. По такой схеме строят однокоординатные и двухкоординатные амплитудные следящие устройства (рис. 3.9). Технические характеристики промышленных РДП приведены в табл. 3.3. Обозначено: N - количество полных оборотов РДП (циклов преобразования).
Таблица 3.3. Примеры промышленных РДП
| Модель | Тип | Диапазон, мм (град) | Быстродействие, м/с, (рад/с) | e, % | N, цикл | m, кг | Габариты, мм |
| Вт-721 | линейный | 0 ... 16000 | 0,3 | 1 | 5 103 | 0,9 | 43´76´120 |
| Вт-712 | круговой | (0 ... 688) | (1,3) | 1 | 6,5 103 | 0,2 | Æ53´56 |
| Вт-714 | комбинированный | 0 ... 16000 (±70) | 1,5 (2) | 3 104 (5 104) | 1,0 | 56´120´133 | |
| LP-250F | линейный | 0 ... 250 | 1,2 | 0,1 | 106 | 0,3 | Æ34´272 |
Примечание. Модель LP-250F разработана фирмой Midory Sokky, Япония.
К достоинствам РДП следует отнести простоту построения измерительных схем, высокий уровень выходного сигнала, малогабаритность и «встраиваемость» в оборудование. Следует отметить также, что они обладают радиационной стойкостью; и низкой стоимостью.
Недостатками РДП являются нелинейность характеристики при нагрузке, наличие зоны нечувствительности и малая износостойкость (не более 107 поворотов оси) для лучших моделей контактных РДП. Для них характерна также сравнительно малая частота вращения (до 100 ... 200 об/мин); чувствительност к вибрациям и загрязнению.
3.1.2. Электромагнитные датчики положения
Основу электромагнитных датчиков положения (ЭДП) составляют индуктивные или индукционные ЧЭ. Самые простые ЭДП строятся на базе индуктивных ЧЭ дроссельного типа. Пример такого ЭДП с дифференциальным включением катушек, его функция преобразования и эквивалентная схема представлены на рис. 3.10. Номиналы ЧЭ Z0 при перемещении сердечника изменяются в пределах: Z1 = Z0 + DZ и Z2 = Z0 - DZ, а функция преобразования может быть описана выражением вида:
 где U - напряжение питания.
где U - напряжение питания.
Принцип включения подобного ЭДП в измерительную цепь показан на рис. 3.11. Здесь перемещение сердечника приводит к изменению электрического импеданса системы катушек Z » Z0 ± DZ, где составляющая DZ - характеризует изменение индуктивного сопротивления катушек. Синхронный детектор предназначен для выделения из усиленного сигнала компоненты пропорциональной непосредственно DZ. Промышленно выпускаемые индуктивные ЭДП, обладают линейной функцией преобразования в широком диапазоне перемещений: ± 0,1 ... ±200 мм, при eнл = 0,5 ... 2% и чувствительности S = 10 ... 100 мВ/В мм.
 Индуктивные ЭДП, как правило, содержат встроенный сердечник, однако известны схемы, в которых регистрируется изменение поля внешнего магнита. Нередко применяются магниторезистивные ЧЭ и ЧЭ на основе эффекта Холла. Так, например, ЭДП со встроенными магнитами, работающий по принципу прерывания магнитного зазора между магнитом и ЧЭ, используется в качестве дискретного измерителя угла. Похожие датчики установлены в системах электронного зажигания автомобилей ВАЗ 2108 … 2110 (2AV54).
Индуктивные ЭДП, как правило, содержат встроенный сердечник, однако известны схемы, в которых регистрируется изменение поля внешнего магнита. Нередко применяются магниторезистивные ЧЭ и ЧЭ на основе эффекта Холла. Так, например, ЭДП со встроенными магнитами, работающий по принципу прерывания магнитного зазора между магнитом и ЧЭ, используется в качестве дискретного измерителя угла. Похожие датчики установлены в системах электронного зажигания автомобилей ВАЗ 2108 … 2110 (2AV54).
Во всех схемах ЭДП ЧЭ воспринимают изменение магнитного поля, поэтому они являются также измерителями индукции. (Промышленно выпускаются магнетометры с диапазонами измерения ± 2 … ± 2500 Гс).
Технические характеристики промышленных индуктивных ЭДП приведены в табл. 3.4. Обозначено: fраб - частота внешнего магнитного поля.
Таблица 3.4. Примеры промышленных индуктивных ЭДП
| Модель | Диапазон, мм (град) | Uп, В | Uвых, В | e, % | fраб, Гц | DT0 | Размеры, мм |
| 992АА08 | 0 … 1,4 | 9 … 30 | ± 1,8 | ± 1 | 3000 | -25 … 80 | Æ8´40,1 |
| 992АВ30 | 0 … 16 | 10 … 30 | ± 1,8 | ± 3 | 250 | -25 … 80 | Æ30´51,8 |
| НМС 1501 | (± 90) | 1 … 25 | 14 | 5 106 | -40 …125 | микросхема |
Примечания:
1. Датчики разработаны фирмой Honeywell, США,
2. Модель НМС 1501 содержит мостовую схему в виде 4-х плечного магниторезистивного ЧЭ.
Наиболее точные ЭДП строятся на базе индукционного подхода, в соответствии с которым магнитный контур образуют несколько катушек - первичных и вторичных, причем во вторичных индуцируется ЭДС индукции, величина которой пропорциональна относительному положению катушек. Поэтому, индукционные ЭДП относятся к классу электрических машин и разделяются на шесть основных групп:
· дифференциальные трансформаторы,
· индукционные потенциометры и микросины,
· сельсины;
· резольверы (Р, называемые также вращающимися трансформаторами - ВТ);
· индуктосины (И);
· редусины (РД).
Сравнительные характеристики индукционных ЭДП приведены в табл. 3.5.
Таблица 3.5. Сравнительные характеристики некоторых индукционных ЭДП
| Тип ЭДП | Диапазон мм, (град) | eнл | eнл | S, мВ/В мм (мВ/В град) |
| Дифференциальный трансформатор | 1 ...500 (+45о) | 0,05 ... 1 | 0,01...0,05 | 1... 500 (1 ... 10) |
| Индукционный потенциометр | (120 ... 180о) | 0,1 ... 0,5 | (0,5 ... 20) | |
| Микросин | (+10о) | 0,5 ... 1 | (100) | |
| Сельсин | (360о) | 0,05 ... 1 | (10 ... 100) |
В робототехнике и мехатронных системах чаще используются резольверы, индуктосины и редусины, главным образом, благодаря большей точности при полном диапазоне измерения (± 3600) и сравнительно небольших размерах. В дальнейшем ограничимся рассмотрением именно этих типов индукционных ЭДП.
В электрической машине выделяют две группы обмоток - первичные (активные) и вторичные (пассивные). Активные обмотки, называемые также обмотками возбуждения, подключаются к сети переменного тока. Наличие тока в обмотке электрической машины вызывает, в общем случае, следующие электромагнитные эффекты:
· ЭДС самоиндукции в «активной» обмотке (закон Фарадея):
E1 = - (dФ1/dt) = - L (dI1/dt)
· ЭДС индукции в «пассивных» обмотках:
E2 = - (dФ21/dt) = - M21 (dI1/dt).
Коэффициент взаимной индуктивности M21, например, для трансформатора равен:
M21 = N1 N2/ Rm, где  ,
,
здесь N1, N2 - количество витков первичной и вторичной обмоток, Rm, l и $ - как и прежде магнитное сопротивление сердечника, длина и сечение проводника.
· Магнитодвижущую (намагничивающую) силу:
F = I N = Ф Rm,
Данное выражение получило название закона Ома для замкнутой магнитной цепи или формулы Гопкинсона. (Роль магнитного потока в магнитной цепи аналогична роли тока в электрической цепи).
· Магнитный момент pm = I $ в замкнутом контуре или системе контуров (например, соленоиде). Его направление совпадает с направлением магнитного поля.
Функционирование всех современных индукционных ЭДП основано на общих принципах. Поэтому, без потери общности, при анализе основных процессов, происходящих в электрической машине, ограничимся базовой структурой ЭДП этого типа - резольвером.
3.1.2.1. Резольверы
 Резольвер - это четырехобмоточная двух- и более полюсная электрическая машина, использующая индукционное взаимодействие роторных и статорных обмоток. (Р применяются в качестве угловых ЭДП, а также в качестве решающих устройств в аналоговых системах автоматики).
Резольвер - это четырехобмоточная двух- и более полюсная электрическая машина, использующая индукционное взаимодействие роторных и статорных обмоток. (Р применяются в качестве угловых ЭДП, а также в качестве решающих устройств в аналоговых системах автоматики).
В зависимости от формы выходного сигнала выделяют три основных типа Р: синусно-косинусный; линейный и Р-построитель. Для получения Р различных типов можно использовать одну и ту же машину с двумя обмотками на статоре и двумя на роторе при различных способах их включения.
 Конструктивно Р выполнен подобно асинхронному двигателю с фазным ротором, который, также как и статор, представляет собой многополюсный сердечник из листов электротехнической стали (или пермаллоя). В пазах ротора и статора (или между зубьями магнитопровода) размещены по две распределенные обмотки, сдвинутые на 900 друг относительно друга. В общем случае, пазов может быть больше, чем полюсов. Концы обмоток выводятся на клеммник, причем статорных - непосредственно, а роторных - посредством 4-х токосъемных колец ротора и щеток. На рис. 3.12а представлена обмотка синусной фазы с осью S, а также магнитопровод с 2 парами полюсов и тремя пазами (рис. 3.12б). Эта схема адекватна конструкции с, например, 32 парами полюсов и 48 пазами.
Конструктивно Р выполнен подобно асинхронному двигателю с фазным ротором, который, также как и статор, представляет собой многополюсный сердечник из листов электротехнической стали (или пермаллоя). В пазах ротора и статора (или между зубьями магнитопровода) размещены по две распределенные обмотки, сдвинутые на 900 друг относительно друга. В общем случае, пазов может быть больше, чем полюсов. Концы обмоток выводятся на клеммник, причем статорных - непосредственно, а роторных - посредством 4-х токосъемных колец ротора и щеток. На рис. 3.12а представлена обмотка синусной фазы с осью S, а также магнитопровод с 2 парами полюсов и тремя пазами (рис. 3.12б). Эта схема адекватна конструкции с, например, 32 парами полюсов и 48 пазами.
Выпускаются также бесконтактные Р с подключением роторных обмоток посредством плоских пружин, с углом поворота до 7000 и Р со вспомогательными переходными трансформаторами.
Схема Р показана на рис. 3.13. Обмотки С1С2 и С3С4 называются главной и квадратурной обмотками статора, а Р1Р2 и Р3Р4 - синусной и косинусной обмотками ротора.
При подключении обмотки возбуждения (главной обмотки Р) к сети переменного тока в машине возникает продольный магнитный поток Фпр пульсирующий с частотой сети. Этот поток в обмотках ротора индуцирует две ЭДС Eс0 и Eк0, частота которых равна частоте сети, а действующие значения зависят от положения ротора относительно статора.
Каждая замкнутая обмотка Р эквивалентна магниту, представляемому в виде пары полюсов S-N.
В многополюсных машинах с p парами полюсов за один полный поворот ротора изменение магнитного поля (период изменения выходного сигнала) соответствует пространственному углу q* = 360p0. Этот принцип, получивший название «электрической редукции» позволяет существенно повысить точность Р, и в настоящее время является общепринятым. В соответствии с этим принципом, фаза Uвых меняется в р раз чаще, чем фаза угла поворота ротора. «Электрические» градусы qэл, Uвых связаны с «геометрическими» градусами qгеом угла поворота соотношением qэл = p qгеом (рис. 3.14).
 В Р число пазов (или зубцов) полюса, а также распределение обмоток в пазах (т.е. распределение магнитного потока на полюсе) определяют, насколько точно выходной сигнал соответствует функции синуса угла. Так, если в двухполюсном Р число пазов (зубцов) статора zс = 20, а число пазов (зубцов) ротора zр = 12, то в выходном сигнале будут значительно ослаблены 3 и 5-ая гармоники. С той же целью в многополюсном Р имеющем p пар полюсов должны быть выполнены на роторе zр = 12 p зубцов, а на статоре zс = 20 p зубцов.
В Р число пазов (или зубцов) полюса, а также распределение обмоток в пазах (т.е. распределение магнитного потока на полюсе) определяют, насколько точно выходной сигнал соответствует функции синуса угла. Так, если в двухполюсном Р число пазов (зубцов) статора zс = 20, а число пазов (зубцов) ротора zр = 12, то в выходном сигнале будут значительно ослаблены 3 и 5-ая гармоники. С той же целью в многополюсном Р имеющем p пар полюсов должны быть выполнены на роторе zр = 12 p зубцов, а на статоре zс = 20 p зубцов.
 Важным достоинством Р является высокий уровень выходного сигнала, достигающий 100% величины напряжения возбуждения.
Важным достоинством Р является высокий уровень выходного сигнала, достигающий 100% величины напряжения возбуждения.
В зависимости от характеристик обмоток и способа их соединения различают синусно-косинусную (СКР) и линейную (ЛР) схемы включения Р.
Сначала рассмотрим схемы СКР (рис. 3.15а). Для него формат выходных напряжений Uс и Uк записывается выражениями:
Uс = kс Uв sin (wt + a1) sin q,
Uк = kк Uв sin (wt +a2) cos q.
Здесь w - несущая частота Р (частота тока возбуждения), kс, kк - коэффициенты трансформации синусной и косинусной обмоток (они равны отношению числа эффективных витков соответствующей роторной обмотки к числу эффективных витков статорной), a1, a2 - фазовые сдвиги (погрешности намоток).
Информационное преобразование СКР описывается функцией вида U = f(q). На холостом ходу (т.е. без нагрузки) при kс = kк = k напряжения на обмотках равны соответствующим ЭДС (рис. 3.15б):
Uс0 = Eс0 = k Eв sin q;
Uк0 = Eк0 = k Eв cos q.
Здесь Eв - ЭДС обмотки возбуждения (частота тока - 400 ... 4000 Гц), q - угол поворота ротора относительно статора, k - коэффициент трансформации.
ЭДС обмотки возбуждения Eв определяется значением магнитного потока в этой обмотке:
Eв = 4,44 fв Nв Kв Фпр,
где fв - частота тока возбуждения, Nв, Kв - число витков и обмоточный коэффициент обмотки возбуждения.
В простейшей схеме включения Р, когда выходной сигнал снимается с синусной обмотки, его величина меняется в функции синуса угла поворота q.
Функция преобразования такого СКР в режиме холостого хода примет вид:
Eс0 = Uс max sin q = k Eв sin q.
(Например, при k = 1 и q = 300 получим Eс0 = Umax/2).
Реальный режим работы СКР отличен от режима холостого хода. Если к синусной обмотке подключить нагрузку Zнс то по обмотке потечет ток Iс:
Iс = Eс/(Zс + Zнс),
где Zс - сопротивление синусной обмотки.
При этом в соответствии с формулой Гопкинсона, магнитодвижущая сила (МДС) ротора Fс, вызванная током синусной обмотки Ic равна:
Fc = Фс Rmc = Iс Nс,
где Iс, Nс - ток в цепи и число витков синусной обмотки ротора, Фс - магнитный поток, наводимый в цепи синусной обмотки, Rmc - полное магнитное сопротивление синусной обмотки.
 Поскольку ось этой МДС совпадает с осью синусной фазы (рис. 3.16), ее можно представить в виде векторной суммы двух составляющих (по отношению к потоку возбуждения статора Фв = Фпр0): продольной Fс пр = Fс sin q и поперечной Fс поп = Fс cos q.
Поскольку ось этой МДС совпадает с осью синусной фазы (рис. 3.16), ее можно представить в виде векторной суммы двух составляющих (по отношению к потоку возбуждения статора Фв = Фпр0): продольной Fс пр = Fс sin q и поперечной Fс поп = Fс cos q.
Продольная составляющая МДС ротора создает в обмотке возбуждения статора компенсирующий ток, МДС которого Fк, также как и в двухобмоточном трансформаторе, компенсирует действие Fс пр. Результирующий продольный поток (Фпр = Фв - Fк/Rmc) индуцирует ЭДС в синусной обмотке:
Eс пр = k Eв sin q.
ЭДС обмотки возбуждения Eв вследствие размагничивающего действия Fк уменьшается, что приводит к уменьшению составляющей ЭДС синусной обмотки Eс пр: Eс пр < Eс0.
Поперечная составляющая МДС Fс поп создает в роторе поперечный поток Фпоп, относительно которого синусная обмотка является косинусной (см. рисунок) и в ней индуцируется ЭДС:
Eс поп = 4,44 fв Nс Kс Фпоп cos q = C Fc cos2 q,
где Kс - обмоточный коэффициент роторной синусной обмотки, С - константа.
Таким образом, при нагрузке в синусной обмотке кроме «информативной» ЭДС, пропорциональной синусу угла поворота, индуцируется ЭДС, пропорциональная току нагрузки и квадрату косинуса угла поворота. Эта составляющая существенно искажает синусный характер функции преобразования.
Eс = Eс пр + Eс поп = k Eв sin q + C Fc cos2 q.
Добавочная составляющая ЭДС вызывает появление погрешности, величина которой тем больше, чем меньше Zнс. Искажениям подвергаются как амплитуда, так и фаза сигнала Eпр, причем амплитудные искажения достигают 20% от Eс пр.
Аналогично, в косинусной обмотке индуцируется добавочная ЭДС, пропорциональная току нагрузки и квадрату синуса.
 Для устранения амплитудных и фазовых искажений сигнала Eс используется симметрирование СКР, которое заключается в компенсации поперечной составляющей потока реакции ротора.
Для устранения амплитудных и фазовых искажений сигнала Eс используется симметрирование СКР, которое заключается в компенсации поперечной составляющей потока реакции ротора.
Выделяют три способа симметрирования Р: первичное, вторичное и комбинированное.
 Первичное симметрирование (рис.3.17) проводится с использованием квадратурной обмотки статора, к которой подключается сопротивление Zк. Ток, возникающий в замкнутом на нагрузку контуре обмотки С3С4 создает поперечную составляющую МДС Fк, которая направлена противоположно Fс поп:
Первичное симметрирование (рис.3.17) проводится с использованием квадратурной обмотки статора, к которой подключается сопротивление Zк. Ток, возникающий в замкнутом на нагрузку контуре обмотки С3С4 создает поперечную составляющую МДС Fк, которая направлена противоположно Fс поп:
Fпоп = Fс поп - Fк.
Встречное направление векторов Fк и Fс поп обусловлено тем, что квадратурная обмотка относительно поперечного потока Фпоп представляет собой «вторичную» обмотку трансформатора, и ее МДС Fк направлена против МДС Fс поп «первичной» обмотки. Следовательно, результирующая МДС Fпоп будет значительно меньше МДС Fс поп, а значит, величина поперечного потока Фпоп и вызванная им погрешность также резко уменьшатся.
Если сопротивление источника питания обозначить Zп, то для наилучшего симметрирования нужно выполнить условие:
Zк = Zп.
При питании СКР от сети переменного тока, сопротивление которой считается равной нулю, квадратурная обмотка С3С4 закорачивается.
Вторичное симметрирование выполняется с помощью роторной косинусной обмотки Р3Р4, к которой подключается нагрузка Zнк. Магнитный поток в этой обмотке ослабляет поток реакции, поскольку поперечные составляющие их МДС Fс поп и Fк поп направлены встречно (рис. 3.18). Наилучшая компенсация получается при условии, что:
 Zк + Zнк = Zс + Zнс,
Zк + Zнк = Zс + Zнс,
где Zс, Zк - сопротивления обмоток Р1Р2 и Р3Р4.
Полное симметрирование достигается при равенстве комплексных сопротивлений в синусной и косинусной цепях ротора (рис. 3.19). Это условие, в свою очередь, требует постоянства сопротивления нагрузки. Наибольшая линейность функции преобразования СКР достигается при комбинированном первично-вторичном симметрировании. Запишем в комплексных переменных:

 и
и 
Здесь jс и jк - фазы отставания токов Iс и Iк от ЭДС в цепях роторных обмоток.
Zс = Zр + Zнс
Результирующие МДС по осям статора равны:


При малом Rв получим Eв » Uв » const, Zc » Zк и, следовательно, МДС по поперечной оси Fпоп = 0.
 В ряде случаев целесообразно получить линейную зависимость выходного напряжения от угла поворота ротора. Для этого могут использоваться обычные Р включенные по линейной схеме или специализированные ЛР. Схема включения Р по линейной схеме моделирует зависимость вида (рис. 3.20):
В ряде случаев целесообразно получить линейную зависимость выходного напряжения от угла поворота ротора. Для этого могут использоваться обычные Р включенные по линейной схеме или специализированные ЛР. Схема включения Р по линейной схеме моделирует зависимость вида (рис. 3.20):
Eс = k Eв sin q/(1 + y cos q)
где q - угол поворота, y - независящий от q комплексный множитель.
(При - 550 < q < + 550 и коэффициенте трансформации k = 0,52 ... 0,56 относительная погрешность линейности eнл составляет ~ 1%).
В простых режимах функция преобразования апроксимируется приближенным выражением:
 Eс » k' Eв q
Eс » k' Eв q
Также как и для синусно-косинусных схем, в ЛР применяют первичное и вторичное симметрирование (рис. 3.21).
Точность Р оценивают по погрешности отображения синуса (для СКР) и погрешность линейности (для ЛР), а также по величине остаточной ЭДС. Погрешность от «обмоточных гармоник» компенсируется выбором количества зубцов, их формы и скоса.
Р выпускают 6 классов точности: 0,01; 0,02; 0,05; 0,1; 0,2; 0,3. В таблице 3.6 приведены сведения по трем классам точности Р).
Таблица 3.6. Классы точности Р
| Назначение | Параметр | Значение параметра для класса точности | ||
| Величина | 0,01 | 0,05 | 0,3 | |
| СКР | Погрешность отображения синуса, % | ± 0,01 | ± 0,05 | ± 0,3 |
| СКР | Остаточная ЭДС, %, не более | 0,006 | 0,025 | 0,15 |
| ЛР | Погрешность линейности, % | - | ± 0,05 | ± 0,3 |
| ЛР | Остаточная ЭДС, %, не более | - | 0,025 | 0,15 |
Для использовании Р в качестве высокоточных ДПП, их обычно включают в измерительную цепь по схеме фазовращателя (Ф). В этой схеме информация об угловом положении вала преобразуется в сдвиг фазы выходного напряжения Отметим, что Ф представляет собой самостоятельный вид ЭДП, но традиционно для указанной цели также используются Р.
По конструкции Ф представляет собой электрическую машину неявнополюсного типа. Разработаны двухфазные Ф с вращающимся магнитным полем и однофазные с пульсирующим полем. Для повышения точности используют двойные и мостовые фазосдвигающие RC-фильтры, что уменьшает погрешность в 2 ... 3 раза. Точностные характеристики определяются величиной фазовой погрешности. В зависимости от нее Ф имеют 15 классов точности от 0,1’ до 600’. Номинальные коэффициенты трансформации k соответствуют ряду: 0,2; 0,4; 0,6; 0,8; 1,0.
Для получения функции преобразования Р в виде jU = f(q), где jU - фаза Uвых используются два подхода.
Первый - это создание потока возбуждения в виде вращающегося кругового магнитного поля. Второй подход предполагает суммирование выходных напряжений Р с помощью фазосдвигающих цепочек.
Для получения вращающегося магнитного поля статорные обмотки Р запитываются двумя синусоидальными напряжениями одинаковой амплитуды Uв max и сдвигом по фазе p/2 радиан (рис. 3.22). Сдвиг формируется фазовым расщепителем:
U1 = Uв max sin wt
U2 = Uв max sin (wt + p/2) = Uв max cos wt
Напряжение на роторе будет равно:
Uвых = Uc = k (U1 cos q + U2 sin q)
Подставляя значения U1 и U2, получим:
Uвых = k Uв max sin (wt + q)
 Таким образом, при изменении q фаза Uвых вращается относительно одного из напряжений (U1) синхронно с поворотом ротора на угол q.
Таким образом, при изменении q фаза Uвых вращается относительно одного из напряжений (U1) синхронно с поворотом ротора на угол q.
Полученное выражение функции преобразования справедливо, если амплитуды напряжений питания равны, и сдвиг фаз между ними равен p/2. Так, для получения фазовой погрешности ~ 0,1 % фазовый сдвиг не должен отличаться от p/2 более чем на (3 ... 5)‘, а разность амплитуд не должна превышать 0,3 … 0,5 %.
Принцип действия схемы с фазосдвигающим устройством (рис. 3.23) основан на получении сигнала несущей частоты, фаза которого сдвинута по отношению к опорному сигналу на угол, совпадающий с угловым отклонением вращающегося вала.
Учитывая, что
U1 = k1 Uв sin (wt + a1) sin q,
U2 = k2 Uв sin (wt +a2) cos q.
Тогда, при равенстве k1 и k2, а также wRC = 1, получим:
 Ua = kUв [sin wt cos q + sin (wt +p/2) cos q]
Ua = kUв [sin wt cos q + sin (wt +p/2) cos q]
или Ua = kUв sin (wt +q).
Параметры фазосдвигающей цепочки выбираются из условия: R = 1/wC >> r, где r - активное сопротивление роторной обмотки.
При Rн > 2R будем иметь окончательно
Uвых = Uа » k Uв sin (wt -y),
где y = q - a ; a - погрешность, связанная с постоянным сдвигом фаз, зависящим от асимметрии обмоток, температуры и т.п.).
 Следовательно, фаза Uвых пропорциональна фазе q с точностью до параметра a. В целом, такие схемы не позволяют достичь высокой точности. Суммарная погрешность, как правило, достигает 0,50 или 0,1%.
Следовательно, фаза Uвых пропорциональна фазе q с точностью до параметра a. В целом, такие схемы не позволяют достичь высокой точности. Суммарная погрешность, как правило, достигает 0,50 или 0,1%.
Частота сети (частота напряжения питания статора) fс = w/2p, и составляет 400 ... 4000 Гц.
С помощью триггера Шмитта опорное синусоидальное напряжение Uв и напряжение Uа преобразуются в прямоугольные сигналы и используются для формирования старт - и стоп-импульсов счетчика (рис. 3.24).
На основе Р строятся разнообразные индукционные ДПП. Рассмотрим в качестве примера датчик угла, разработанный фирмой Muirhead, Англия (рис. 3.25). Измерительная схема датчика - двухшкальная, т.е. она содержит каналы грубого (ГО) и точного (ТО) отсчетов. Канал ГО служит для подсчета количество полных оборотов ротора, ТО - для определения величины угла в пределах одного оборота. Генератор, делитель и низкочастотный фильтр формируют синусоидальный сигнал возбуждения с несущей частотой 1 кГц. Выходом Р является роторная обмотка, на которой образуется сигнал той же частоты, сдвинутый по фазе относительно исходного на угол q. Точностные характеристики датчика зависят от частоты магнитного поля и скорости вращения ротора. В стандартном режиме частота вращения кругового поля составляет 1 кГц. Поэтому, если Р содержит одну пару полюсов, то за 1 мс ротор повернется на 1 оборот, или 360о, и за это время в счетчике накопится 360 импульсов. (Это значит, что выходной код - девятиразрядный). Таким образом, разрешающая способность датчика Dq составит 10. Следовательно, для поддержания такой точности, необходимо, чтобы изменение угла поворота ротора не превышало 10 за 1 мс, что накладывает ограничение на скорость вращения вала Nmax - не более 15 об/мин. Погрешность линейности схемы eнл = 0,28%. Частота среза fср Р определяется той же формулой, что и для РДП:
fср = 3600 Nmax/2p a1
(При Nmax = 15 об/с, a1 = 2о, получим fср = 430 Гц).
Промышленно выпускаются и другие датчики, использующие ту же схему. Существенно, что них также справедливо ограничение на скорость вращения вала.
Схема Р, использующая преобразование «фаза-код» и основанная на принципе фазовращателя представлена на рис. 3.26.
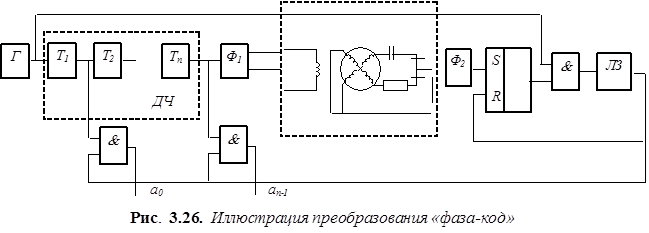
Делитель частоты ДЧ формирует меандр частотой fn = fген/2n. Формирователь Ф1 преобразует его в синусоидальный сигнал той же частоты. Выходное напряжение Uвых с фазой пропорциональной углу поворота ротора q подается на блокинг-генератор (триггер Шмитта) Ф2, снова формирующий меандр в момент изменения знака напряжения Uвых. RS-триггер, элемент & (логическое «И») и линия задержки ЛЗ используются для синхронизации с генератором Г и ликвидации неоднозначности считывания (импульсы не попадают на фронты переключения триггеров T1, ... Tn). Разрешающая способность схемы зависит от числа пар полюсов p:
Dq = qmax/2n = 3600/p 2n
Так, при p = 512, n = 8, Dq » 10” и диапазон преобразования составит 360´ 60´60/10 = 1,3 105.
Р широко используются в качестве ДПП с системах управления оборудованием, роботов и манипуляторов.. Пример использования Р в системе управления копирующим манипулятором представлен на рис. 3.27, где система управления построена по принципу двухстороннего действия.
 Системы двустороннего действия изначально разрабатывались для манипулирования удаленными объектами в экстремальных условиях, например, в экологически вредном производстве. Затем они нашли широкое применение и в других задачах дистанционного управления. (В частности, такие устройства используются при управлении концертными телекамерами). В системе управления, представленной на рис. 3.27 обеспечивается двунаправленная передача положений и усилий, что позволяет оператору ощущать то, что он делает на расстоянии. Такой подход существенно повышает эффективность работы оператора при значительно меньших физических и умственных нагрузках. Копирующий манипулятор представляет собой сочетание двух пространственных механизмов, образующих задающий и исполнительный органы. По каждой степени подвижности i копирующего манипулятора в системе двустороннего действия имеются четыре функциональные координаты: координаты вала на задающей qзi и исполнительной qиi стороне и соответствующие координаты моментов Мзi и Миi. В задачу системы ДСД входит обеспечение согласованного движения органов и поддержание соответствия между моментами на стороне оператора и стороне нагрузки. Включение Р в кинематическую цепь копирующего манипулятора позволяет согласовать движения задающего и исполнительного органов. Расмотренная схема получила название индикаторной синхронной передачи. Обозначено: Jоп, Jн - моменты инерции роторов Р и подвижных частей на стороне оператора и нагрузки; Mн - момент нагрузки, вызванный переносимым грузом.
Системы двустороннего действия изначально разрабатывались для манипулирования удаленными объектами в экстремальных условиях, например, в экологически вредном производстве. Затем они нашли широкое применение и в других задачах дистанционного управления. (В частности, такие устройства используются при управлении концертными телекамерами). В системе управления, представленной на рис. 3.27 обеспечивается двунаправленная передача положений и усилий, что позволяет оператору ощущать то, что он делает на расстоянии. Такой подход существенно повышает эффективность работы оператора при значительно меньших физических и умственных нагрузках. Копирующий манипулятор представляет собой сочетание двух пространственных механизмов, образующих задающий и исполнительный органы. По каждой степени подвижности i копирующего манипулятора в системе двустороннего действия имеются четыре функциональные координаты: координаты вала на задающей qзi и исполнительной qиi стороне и соответствующие координаты моментов Мзi и Миi. В задачу системы ДСД входит обеспечение согласованного движения органов и поддержание соответствия между моментами на стороне оператора и стороне нагрузки. Включение Р в кинематическую цепь копирующего манипулятора позволяет согласовать движения задающего и исполнительного органов. Расмотренная схема получила название индикаторной синхронной передачи. Обозначено: Jоп, Jн - моменты инерции роторов Р и подвижных частей на стороне оператора и нагрузки; Mн - момент нагрузки, вызванный переносимым грузом.
Характеристики промышленных Р приведены в табл. 3.7
Таблица 3.7. Примеры промышленных Р
| Модель | Тип | U, В | f, кГц | k | Rвх, кОм | e, % (‘) | Æ, мм | l, мм | m, кг |
| МВТ-2А | СКР | 30 | 0,4 | 1 | 0,5 ... 2,0 | 0,02 | 35 | 72 | 0,35 |
| СКТД-6465 | СКР* | 36 | 0,4 .. 4 | (± 2’) | 65 | 16 | 0,3 | ||
| 1,2ВТ-2ТВ | ЛВТ | 6 | 0,4 | 0,5 | 0,2 | 0,04 | 12 | 47 | 0,02 |
| TS-152 | СКР | 26 | 0,4 | 1,1 | 0,5 ... 3,0 | 0,01 | 19 | 32 | 0,05 |
Примечания.
1. Модель TS-152 - разработана фирмой Tamagawa, Япония.
2. СКТД-6465 - многополюсный СКР, с р = 16.
В целом, погрешности Р с одной парой полюсов в режиме фазовращателя составляют 15 ... 25', многополюсного СКР ~ 5 … 10".
В завершение раздела подведем некоторые итоги. Достоинства Р: малые габариты, высокая надежность и помехозащищенность, высокий уровень выходного сигнала и умеренная стоимость привели к тому, что в течение почти семидесяти лет на основе этих датчиков строятся измерители углов разного назначения. В то же время Р не лишены недостатков. К ним относятся: необходимость симметрирования обмоток и использования измерительных схем, высокие требования к точности сборки пакетов магнитопроводов, наличие щеточного узла, зависимость точности от скорости вращения ротора, а также чувствительность к изменению внешних факторов - температуры среды, частоты и амплитуды напряжения возбуждения. Все это требует разработки других измерительных схем и поиска более точных решений.
В последнее время в связи с резко возросшими требованиями к точностным и динамическим характеристикам систем управления в различных мехатронных устройствах все чаще стали использоваться высокоточные и малоинерционные ДПП. Они имеют бесконтактную конструктивную схему и применяют электрическую редукцию, причем статор и ротор содержат зубцовые сопряжения определенных типов. Среди таких преобразователей наибольшую известность получили растровые ЭДП, редусины (РД) и индуктосины (И).
3.1.2.2. Растровые электромагнитные датчики положения
Системы, использующие растровые сопряжения широко распространены в прецизионных средствах измерения линейных и угловых перемещений. Первоначально, растры разрабатывались применительно к различным оптическим системам для модуляции светового потока. Оптический растр представлял собой некоторую периодическую структуру, обладающую различной пропускающей или отражающей способностью. Позже данный подход нашел применение и в магнитных системах, с той лишь разницей, что растровое сопряжение модулировало магнитный поток. Аналогом различной пропускающей способности в оптическом растре служит различное магнитное сопротивление - в магнитном. Самым известным решением, позволяющим формировать магнитные растры, стало использование зубцовых сопряжений. В этом случае, тип растрового сопряжения зависит от формы, количества зубцов статора Zс и ротора Zр, а также их взаимного расположения. Именно по этому принципу построены бесконтактные растровые ЭДП (РЭДП), широко используемые в качестве датчиков линейных и угловых перемещений в системах управления станков.
Наиболее известны зубцовые растры двух типов: нониусные и комбинационные (муаровые).
В общем случае, нониусное сопряжение - это совокупность двух шкал с различной ценой деления, одна из которых смещается относительно другой в процессе измерения. Эффективность таких систем обусловлена тем, что дискретность преобразования определяется не ценой деления шкал, а их нониусным соотношением. (Примером нониусных сопряжений являются шкалы штангенциркуля и микрометра). Цена деления нониусной шкалы ан связана с ценой деления опорной шкалы а0 зависимостью вида:
ан = а0 g ± С
здесь С - значение дискретности нониуса, g - модуль нониусной шкалы.
Для получения подобных сопряжений статор и ротор РЭДП делают с различным количеством зубцов. Системы этого типа используются при построении измерителей линейных перемещений.
В муаровом сопряжении растров деления шкалы формируются не отдельными зубцами статора и ротора, а их совокупностью, так называемой, комбинационной полосой. При этом, как правило, шаг и количество зубцов статора и ротора одинаково, а сами зубцы располагаются под углом друг к другу. Муаровое сопряжение применяют в измерителях угла.
В обеих схемах измерительный сигнал снимается с обмоток считывания, которые, как и обмотки возбуждения, расположены в проточках статора. Таким образом, в конструкции РЭДП отсутствует щеточный узел.
В зависимости от типа преобразователя (линейный или угловой) в РЭДП используются разные комбинационные сопряжения. Для измерителей линейных перемещений: параллельные и сеточные, для измерителей углов: кольцевые, радиальные и спиральные.
В основе работы РЭДП лежит принцип периодического изменения магнитной проводимости m участков магнитной цепи, образованной статором, ротором и воздушным зазором между их зубцами при перемещении ротора относительно статора. Магнитная проницаемость зависит от площади взаимного перекрытия зубцов. В простых угловых РЭДП один период изменения выходного напряжения соответствует одному обороту ротора; в более точных схемах применяется электрическая редукция.
Наиболее известное комбинационное сопряжение в линейных РЭДП образуется двумя параллельными растрами. Разрешающую способность в таких датчиках достигает ~ 0,01 мм.
 В РЭДП обычно используются секционные обмотки возбуждения (ОВ) и считывания (ОС). Так, если РЭДП содержит несколько ОС, то, аналогично многополюсному Р фазы выходных напряжений будут сдвинуты друг относительно друга на угол b, зависящий от числа обмоток n и расстояния между ними r, причем
В РЭДП обычно используются секционные обмотки возбуждения (ОВ) и считывания (ОС). Так, если РЭДП содержит несколько ОС, то, аналогично многополюсному Р фазы выходных напряжений будут сдвинуты друг относительно друга на угол b, зависящий от числа обмоток n и расстояния между ними r, причем
r = gc/n tg Dj,
где Dj - угол наклона зубцов ротора относительно зубцов статора, gc - зубцовый шаг статора, gc = 1/Zс
Один из видов развертки сопрягаемых поверхностей статора и ротора, описанный в [ ] имеет вид, представленный на рис. 3.28. Заштрихованными показаны участки взаимного перекрытия зубцов статора и ротора. В данной конструкции ОВ и ОС разбиты на четыре секции каждая. Магнитный зазор, развиваемый секциями ОВ 3-1, 3-2, 3-3, 3-4 замыкается между статором и ротором через зубцовый зазор, пересекая ОС 4-1, 4-2, 4-3, 4-4 и наводит в них ЭДС, смещенные друг относительно друга на угол b = 90о. Изменяя такие параметры датчика как Zс и Zр, n и Dj можно изменить разрешающую способность датчика и форму выходного сигнала.
Фаза выходного сигнала с каждой ОС вращается относительно опорного напряжения ОВ синхронно с поворотом ротора РЭДП на угол q. Как и в схемах Р имеем:
Uвых = kR Uв max sin (wt - y),
Здесь Uв - напряжение ОВ, kR - конструктивный параметр РЭДП, y » q.
При соединении ОС между собой фаза Uвых оказывается связанной с фазой поворота ротора q соотношением: y »4 q.
 На рис. 3.29 представлен пример РЭДП комбинационного типа. В датчике используется сопряжение спирального (по спирали Архимеда) и кольцевого растров [ ]. Датчик состоит из статора, на торцевой поверхности которого выполнены кольцевые проточки 1 и радиальные пазы с угловым шагом 900, в которые уложены 4 секции ОВ 2 и ОС 3, выполненные в виде секторов. Ротор 4 представляет собой ферромагнитный диск, жестко закрепленный на оси 5 и вращающийся в подшипниках качения 6. На торцевой поверхности диска выполнена проточка в виде спирали Архимеда, ширина проточки равна половине шага спирали.
На рис. 3.29 представлен пример РЭДП комбинационного типа. В датчике используется сопряжение спирального (по спирали Архимеда) и кольцевого растров [ ]. Датчик состоит из статора, на торцевой поверхности которого выполнены кольцевые проточки 1 и радиальные пазы с угловым шагом 900, в которые уложены 4 секции ОВ 2 и ОС 3, выполненные в виде секторов. Ротор 4 представляет собой ферромагнитный диск, жестко закрепленный на оси 5 и вращающийся в подшипниках качения 6. На торцевой поверхности диска выполнена проточка в виде спирали Архимеда, ширина проточки равна половине шага спирали.
Принцип действия РЭДП основан на том, что магнитный поток, развиваемый ОВ, замыкается через зубцовый зазор и наводит ЭДС в ОС. При повороте ротора происходит периодическое изменение проводимости участков сопряжения статор - ротор, охваченных ОС 3-1, 3-2, 3-3, 3-4 путем изменения площади взаимного перекрытия спиральных и кольцевых выступов ротора и статора (они заштрихованы).
Характеристики промышленных РЭДП приведены в табл. 3.8. Обозначено: D - абсолютная погрешность датчика, L - длина шкалы.
Таблица 3.8. Примеры промышленных РЭДП
| Модель | Тип | Диапазон, мм (рад) | D, мм (‘ ) | Выход | T, оС | Æ, мм | l, мм | L, м |
| ПЛИ 027 | линейный | 0 ... 45 | 0,05 | Цифровой | - 60 ... | 34 | 50 | < 16 |
| ПУИ 047 | поворотный | (0 ... 6) | (5) | + 200 | 34 | 48 |
К достоинствам РЭДП следует отнести большую по сравнению с Р точность, отсутствие щеточного узла, малые габариты, а также высокую надежность. Недостатками РЭДП являются технологическая сложность, чувствительность к электромагнитным полям, зависимость точности измерений от частоты магнитного поля и скорости вращения ротора.
 3.1.2.3. Редусины
3.1.2.3. Редусины
Принцип действия редусина (в других написаниях - редуктосина РД) и его конструкция внешне напоминает многополюсный Р (рис. 3.30). В настоящее время РД широко используются в качестве датчика положения ротора в бесконтактных моментных приводах. Как и моментный двигатель РД имеет встраиваемую конструкцию и устанавливается на одном с ним валу без применения повышающих редукторов.
Статор РД собран из пластин электротехнической стали с большим числом зубцов, ротор представляет собой зубчатое кольцо и подобен ротору асинхронного двигателя с неявновыраженными полюсами.
Соотношение между числом зубцов статора Zc и ротора Zp может быть различным (наиболее известная схема соответствует Zc/Zp = 4/3). Как первичная ОВ 1-2, так и две вторичных ОС 3-4, 5-6 собраны на статоре и, следовательно, в конструкции РД также отсутствует щеточный узел (рис.3.31). В РД используются многополюсные обмотки; поэтому при построении ОВ и ОС их определенным образом соединяют между собой. Обычно, ОВ образуется соединением всех полюсных обмоток так, чтобы полярности соседних полюсов чередовались - в этом случае, образуется одна однофазная обмотка. При построении двух ОС полюсные обмотки связывают последовательно через полюс - вто ричные обмотки оказываются двухфазными. Благодаря такому соединению с ОС снимают два напряжения, амплитуды которых изменяются в функции угла поворота q с пространственным сдвигом, равным электрическому углу 90о или 1/4 зубцового деления ротора. При этом повороту ротора на угол, равный зубцовому делению соответствует полный период изменения выходного напряжения с каждой ОС Uвых, а при повороте ротора на один оборот число периодов изменения амплитуды выходного сигнала равно числу зубцов ротора Zp. Форма кривой Uвых зависит от угловых размеров зубцов и величины зазора между ними и при определенных соотношениях этих параметров удается получить функцию преобразования практически синусоидальной формы. Так, например, для устранения гармоник высшего порядка в функции преобразования, зубцы статора выполняются фасонными. ОС РД (также как и других ЭДП) можно соединить по схеме фазовращателя, получив при этом близкую к линейной зависимость фазы Uвых от q.
ричные обмотки оказываются двухфазными. Благодаря такому соединению с ОС снимают два напряжения, амплитуды которых изменяются в функции угла поворота q с пространственным сдвигом, равным электрическому углу 90о или 1/4 зубцового деления ротора. При этом повороту ротора на угол, равный зубцовому делению соответствует полный период изменения выходного напряжения с каждой ОС Uвых, а при повороте ротора на один оборот число периодов изменения амплитуды выходного сигнала равно числу зубцов ротора Zp. Форма кривой Uвых зависит от угловых размеров зубцов и величины зазора между ними и при определенных соотношениях этих параметров удается получить функцию преобразования практически синусоидальной формы. Так, например, для устранения гармоник высшего порядка в функции преобразования, зубцы статора выполняются фасонными. ОС РД (также как и других ЭДП) можно соединить по схеме фазовращателя, получив при этом близкую к линейной зависимость фазы Uвых от q.
Современные РД, используемые в прецизионных станках и роботах содержат от 64 до 256 пар полюсов, а сама измерительная система строится двухотсчетной (с каналами ТО и ГО), что позволяет достичь погрешности измерения углов ~ (3 … 5)”.
Наиболее распространенные числа электрической редукции p = 25 ... 28, однако габариты РД увеличиваются с ростом p. В таблице 3.9 представлены основные характеристики отечественных РД. Символом fв обозначена частота тока ОВ, k - коэффициент трансформации, w - допустимая скорость вращения вала.
Таблица 3.9. Примеры промышленных РД
| Модель | fв, кГц | Rвх, кОм | k | w, об/мин | e, % | Æ, мм | l, мм | m, кг |
| ВТ120 | 2 | 0,4 | 0,37 | 2000 | 3’ | 120 | 22 | 0,5 |
| ВТ60 | 2 | 0,4 | 0,16 | 5000 | 5’ | 60 | 20 | 0,15 |
| ВТ40 | 2 | 0,2 | 0,16 | 5000 | 10’ | 40 | 16 | 0,1 |
К достоинствам современных РД относятся: высокая точность на большом диапазоне измерений, отсутствие щеточного узла и сравнительно малые габариты. Недостатки РД - те же, что и для всех ЭДП. Отдельно надо отметить, что все рассмотренные выше ЭДП являются поворотными и на их основе можно строить только измерители угла. ЭДП, позволяющим измерять также и линейные перемещения является И.
3.1.2.4. Индуктосины
 Среди ЭДП с электрической редукцией особое место занимают И - многополюсные Р с плоскими печатными обмотками. И был разработан для использования в специальных устройствах автоматики, однако получил широкое применение, и в настоящее время является самым перспективным прецизионным ЭДП. Сейчас, более 30% станков с ЧПУ оснащены И. По внешнему виду он представляет собой Р с увеличенным числом пар полюсов, статорные и роторные обмотки которого расположены в одной плоскости. Отсюда следует главное достоинство И - возможность тиражирования магнитопроводов при использовании одного комплекта фотошаблонов.
Среди ЭДП с электрической редукцией особое место занимают И - многополюсные Р с плоскими печатными обмотками. И был разработан для использования в специальных устройствах автоматики, однако получил широкое применение, и в настоящее время является самым перспективным прецизионным ЭДП. Сейчас, более 30% станков с ЧПУ оснащены И. По внешнему виду он представляет собой Р с увеличенным числом пар полюсов, статорные и роторные обмотки которого расположены в одной плоскости. Отсюда следует главное достоинство И - возможность тиражирования магнитопроводов при использовании одного комплекта фотошаблонов.
По виду входного сигнала И разделяют на две группы: линейные, и угловые (поворотные).
По своей конструкции И - это линейно развернутый многополюсный Р. Его обмотки выполнены на соосных изоляционных (обычно керамических) пластинах путем высокоточного химического травления. Такая технология обеспечивает одинаковые реактивные сопротивления в цепях. В угловых И обмотки располагаются на торцевых поверхностях дисков, обращенных друг к другу и имеют вид радиального растра из плоских проводников. Воздушный зазор между дисками составляет ~ 0,1 ... 0,2 мм.
В простейших схемах первичная обмотка - статор имеет 2n проводников, последовательно соединенных на внутренней и внешней части диска с помощью лобовых шин. Вторичная обмотка - ротор имеет 2N групп проводников по 2r проводников в группе. Шаг между проводниками W на статоре и роторе обычно одинаков. Деление на группы необходимо для образования многофазной системы. Вторичная обмотка И, как правило, двухфазная (рис. 3.32).
Для двухфазных обмоток пространственные сдвиги групп должны составлять электрический угол 00, 900, 1800 … и т.д., что достигается их смещением на расстояние ~ ¼ W. Тогда, соединенные последовательно-встречно нечетные группы образуют первую фазу, четные - вторую. Следовательно, число секторов в фазе N должно быть четным.
Каждый проводник ротора соответствует полюсу, а совокупность двух дифференциально включенных проводников устанавливает угловой или линейный шаг W. Так, ротор из 720 проводников (2n = 720), имеет угловой шаг  . Следовательно, для поворотного И справедливо: W = 3600/n, где n - число пар проводников.
. Следовательно, для поворотного И справедливо: W = 3600/n, где n - число пар проводников.
В линейных И статор получил название линейки, а ротор - скользящего нониуса. Шаг каждой из обмоток линейного И обычно не превышает 1мм.
Наиболее популярная схема включения И - схема фазовращателя в режиме с вращающимся магнитным полем. Обмотки нониуса запитываются двумя синусоидальными напряжениями U1 и U2, частотой 2 ... 20 Кгц, фазы напряжений в ОВ смещены друг относительно друга на угол p/2 радиан. При таких частотах емкостные сопротивления достаточно малы и обеспечивается необходимый уровень выходного сигнала. Заметим что на частотах свыше 10 Кгц обмотки И можно рассматривать как чисто активное сопротивление.
Имеем:
U1 = E sin wt, U2 = E sin (wt + p/2) = E cos wt.
Тогда в обмотке линейки индуцируется синусное напряжение Uвых, фаза которого линейно зависит от смещения сканирующей головки в пределах одного шага обмотки нониуса:
U вых = k (U1 cos 2p x/W + U2 sin 2 px/W) = k E cos( wt - 2 px/W).
где x - смещение головки.
Функция преобразования И (в пределах шага) имеет вид:

здесь j - фаза выходного напряжения. Следовательно, фаза j является линейной функцией перемещения х.
Для получения абсолютных значений перемещений в И также как и в других ЭДП используются двухотсчетные измерительные системы. При построении такой системы в канале ГО производится подсчет числа шагов с помощью реверсивного электронного счетчика, а непосредственное измерение осуществляется в пределах шага.
Для уменьшения погрешности преобразования, связанной с наличием в выходном сигнале гармонических составляющих высших порядков в И применяют специальные меры. Типичным решением является использование распределенных статорных обмоток, т.е. таких, у которых шаг статорной обмотки отличается от шага роторных. Также разрабатываются многослойные обмотки, которые позволяют наряду с увеличением точности поднять и мощность выходного сигнала. Каждый слой представляет собой однофазную бессекторную обмотку. Например, в четырехслойной схеме обмотки выполняют таким образом, чтобы фазовые сдвиги между слоями составляли электрический угол 0, 90, 180, и 2700. Двухфазная роторная обмотка получится при соответствующем соединении слоев. Так, соединенные дифференциально (встречно) внешний и внутренний слои образуют первую фазу, а средние - вторую.
Современные двухотсчетные линейные И имеют измерительную линейку длиной свыше 2500 мм. Погрешность таких систем достигает 10-4 %. (Это соответствует абсолютной погрешности в 1 мкм при измерении перемещения в диапазоне 1 м).
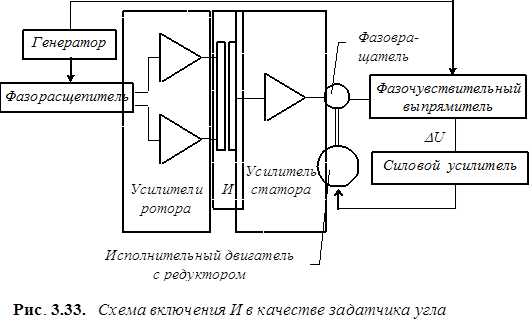
Рассмотрим пример использования И в следящей системе (рис.3.33). Функцию формирования потока возбуждения выполняют роторные обмотки. (Такое включение, известно как схема с вращающимся магнитным полем). Выходной сигнал И Uвых зависит от фазы измеряемого перемещения q:
Uвых = k Uв max sin (wt + q)
Исполнительная следящая система включает силовой усилитель, двигатель со встроенным редуктором и датчик обратной связи на базе фазочувствительного выпрямителя. Вал двигателя жестко связан с валом фазовращателя.
Один из входов фазочувствительного выпрямителя питается непосредственно от задающего генератора, на другой поступает сигнал, пропорциональный фазе Uвых. Следовательно, величина ошибки DU будет зависеть от разности фаз двух сигналов (wt + q) и wt и окажется пропорциональной q.
И обладают наивысшей точностью по сравнению со всеми ранее рассмотренными ЭДП. Это обусловлено как технологическими особенностями таких ДПП, так и конструктивными решениями (использованием многослойных обмоток, значительным количеством полюсов, что, кроме прочего, «усредняет» отдельные погрешности, связанные с каждым полюсом и др.). В И достигнуты следующие метрологические показатели:
· для поворотных: разрешающая способность (аддитивная погрешность) Da = ± 0,05”, воспроизводимость (повторяемость) = ± 0,1”, e ~ 0,00005% (D = ± 0,5” на диапазоне измерения 3600);
· для линейных: Da = ± 0,1 мкм, воспроизводимость = ± 0,25 мкм, e ~ 0,0001% (D = ± 1 мкм на диапазоне измерения 1 м).
В таблице 3.10 приведены характеристики некоторых известных моделей И. D - абсолютная погрешность.
Таблица 3.10. Примеры промышленных И
| Модель | Тип | Диапазон о, (м) | D, “, (мкм) | Æ, мм | l, мм | b, мм | W, о, (мм) |
| ПИКП1-А3 | поворотный | 0 ... 360 | 5 | 178 | 8 | 2 | |
| ПИЛП-Л | линейный | зависит от длины линейки | 13 (на длине 190 мм) | 300 | 20 | (2) | |
| HDR-1 | поворотный | 0 ... 360 | 0,7 | 305 (12’’) | 1 | ||
| HDL-I | линейный | 1 ... 5 (от 10’’) | 1,5 | 2,54 | |||
| IC512 | поворотный | 0 ... 360 | 1,5 | 302 | 19 |
Примечание.
1. Датчики модели HD разработаны фирмой Heidenhain, Германия, количество полюсов - 2000.
2. Модель IC изготовлена фирмой Inductosyn Corp., США. Этот И имеет 512 полюсов.
Достоинствами И являются наивысшая из всех ЭДП точность измерений, высокая технологичность и малый вес. Недостатки те же, что и для всех ЭДП.
3.1.3. Фотоэлектрические датчики положения
Наиболее эффективный метод измерения взаимного положения подвижных кинематических пар, входящих в состав цифровых следящих систем основан на использовании фотоэлектрических (оптических) ДПП. Современные оптические ДПП (ОДП) обеспечивают более высокую разрешающую способность, надежность и точность, чем ПДП и ЭДП тех же размеров.
Лучшие из существующих ОДП измеряют абсолютное угловое положение с разрешением 10-6 относительно полного оборота входного вала. Это позволяет получить 20 - 21 разрядный выходной цифровой сигнал, что соответствует разрешению по углу менее 1". В отличие от аналоговых датчиков, требующих стабилизации питающих напряжений и ЭДП, чувствительных к электромагнитным помехам цифровые ОДП значительно проще в эксплуатации. Так, например, для обеспечения допустимой погрешности ПДП ~ 10-5 (0,01%) требуется, обеспечить стабильность опорного напряжения номиналом 10 В в пределах ± 0,05 мВ. При оцифровке аналогового сигнала с такого датчика без потери точности требуется прецизионный АЦП с погрешностью не более 0,002%.
ОДП обладают и другими достоинствами. Так, в отличие от ПДП и ЭДП для них характерна независимость метрологических параметров от нагрузки, а также высокая помехозащищенность.
Основой ОДП является оптическая система, включающая источник света, кодирующий элемент (диск или линейка) и блок фотоприемников. В качестве источников света используются твердотельные оптронные пары и осветители в виде ламп накала с вольфрамовой нитью. Для обеспечения равномерной освещенности области кодирующего элемента применяются коллимационные линзы (коллиматор). Самым ответственным узлом ОДП, в наибольшей степени определяющим его характеристики, является кодирующий диск. Большинство дисков изготавливается фотоспособом, с использованием метода контактной печати с диска-эталона, на котором с высокой точностью выполнена маска. Тип маски определяет способ кодирования.
Диски-эталоны изготавливаются круговой делительной машиной, наносящей на него радиальные линии с погрешностью до 0,067" [ ]. Точность ОДП с кодирующими дисками, использующими эти эталоны, достигает ~ 10-6 %. Машина может программироваться на создание эталонов как с наиболее распространенными унитарными кодами и двоичными кодами Грея, так и с циклическими кодами, а также синусно-косинусными, логарифмическими и двоично-десятичными кодами. (Наиболее известны делительные машины фирм Baldwin Electronics Inc., США и Vactric Control Equipment, Англия). Технология изготовления дисков обеспечивает не только высокую точность выполнения заданной геометрии кодовых масок, но и резкие границы переходов от непрозрачных участков к прозрачным. Для обеспечения четких переходов на границах и ограничения шума в допустимых пределах при выполнении кодовых масок используются фотоэмульсии с ничтожной зернистостью структуры.
При построении оптических систем применяют две основные схемы (рис. 3.34).
1. В соответствии с первой (рис. 3.34а), оптическая система содержит лампу и линзу, через которую освещается одна сторона диска. Приемники подсвечиваются через узкую щель диафрагмы, установленную строго по линии считывания.
2. Оптическая система второго типа (рис. 3.34б), формирует один линейный пучок, проецируемый по линии считывания диска (диафрагма располагается перед диском).
Как показывает опыт при использовании стандартных светодиодов, обе системы позволяют применять кодирующие диски, на дорожках которых по окружности размещается до 2500 оптических сегментов. Если же использовать лампы со специальной тонкой нитью накаливания, то на диске с диаметром 100 мм можно различать свыше 5000 таких сегментов. Дальнейшее увеличение разрешения достигается электрическими способами. Каждая дорожка диска имеет свой оптический канал: источник, например, электролюминесцентный диод и приемник - фототранзистор. Выходной сигнал с приемника напряжением до 100 мВ при нагрузке 10 кОм служит для формирования логического сигнала заданного уровня. С этой целью обычно применяются триггеры Шмитта на базе операционных усилителей, создающие на выходной шине напряжения логического 0 или 1. Диапазон допустимых изменений выходного напряжения с приемников, при котором сохраняется требуемый уровень срабатывания, составляет ~ 5 ... 80 мВ.
ОДП классифицируются по двум основным признакам.
1. По форме выходного сигнала: накапливающие (преобразователи перемещений) и абсолютные (преобразователи считывания).
2. По способу кодирования: растровые, импульсные и кодовые.
Накапливающие (циклические) преобразователи используют датчик и счетную систему, суммирующую отдельные приращения, а также репер (метку), относительно которого эти приращения суммируются.
Датчики абсолютных значений не содержат репера и выполняются либо одношкальными, либо в виде систем ГО и ТО.
3.1.3.1. Растровые оптические датчики положения
Растровые фотоэлектрические датчики (РОДП) предназначены для преобразования линейных и угловых перемещений в цифровой код на основе использования растрового сопряжения. Принцип действия РОДП подобен РЭДП. Оптический растр представляет собой совокупность однотипных непрозрачных элементов, образующих периодическую структуру и воздействующих на поток лучистой энергии как единое целое. Растр формируется при сопряжении кодирующих элементов датчика. Расположенные на них растровые решетки модулируют световой поток на пути от источника света к приемнику. Конструктивно растровая решетка - это прозрачная пластина, на которую нанесено большое количество непрозрачных штрихов различной формы, обычно равноудаленных и параллельных.
Растры ОДП классифицируются по двум основным признакам:
1. по характеру воздействия на лучистый поток;
2. по геометрической структуре образующих элементов.
В соответствии с первым признаком различают пропускающие и отражающие растры. Пропускающие растры представляют собой решетку из прозрачных и непрозрачных элементов, отражающие - решетку из элементов, зеркально отражающих свет.
 В соответствии со вторым признаком различают растры, формируемые параллельными, сеточными, радиальными, кольцевыми и спиральными оптическими структурами. Для измерения линейных перемещений обычно используются сопряжение двух плоских параллельных растров, а для измерения угловых - сопряжение радиальных растров.
В соответствии со вторым признаком различают растры, формируемые параллельными, сеточными, радиальными, кольцевыми и спиральными оптическими структурами. Для измерения линейных перемещений обычно используются сопряжение двух плоских параллельных растров, а для измерения угловых - сопряжение радиальных растров.
Растровое сопряжение получается наложением растровых решеток с малым постоянным зазором между ними (рис. 3.35а). При этом, штрихи одной решетки накладываются на штрихи другой, уменьшая площадь прозрачных участков сопряжения. При совпадении темных штрихов площадь прозрачных штрихов растра остается без изменения. Возникающие темные и светлые полоски весьма малы, однако они группируются и образуют различные, но достаточно широкие полосы, называемые комбинационными или муаровыми (рис. 3.35б). Положение, форма и шаг комбинационных полос зависят от параметров сопрягаемых растров и их взаимного расположения. Собственно «муар-эффект» является результатом интерференции световых лучей от разных участков решетки. Он проявляется в виде волнистых или полосатых узоров, и особенно заметен при воспроизведении изображений регулярной структуры: типа «солнца с лучами» или «диктора в полосатой рубашке». (В устройствах оцифровки изображений, например, сканерах «муар-эффект» вреден. Он возникает, когда в изображении содержатся элементы, размер которых лежит на границе зоны разрешения).
 Основу РОДП составляет растровое преобразующее звено. Оно включает блок осветителя, создающий параллельный пучок света, растровое сопряжение из подвижного (измерительного) и неподвижного (индикаторного) растров и блок фотоприемников. Модулирующие свойства растрового сопряжения определяются структурой растра и характеризуются пропускающей способностью t = Ф/Ф0, где Ф0, Ф - значения светового потока, соответственно падающего на растровое сопряжение и прошедшее через него в пределах зрачка фотоприемника. В современных конструкциях величина t достигает 0,9 …0,95. В простейших параллельных растрах кроме t выделяют еще два параметра: W - шаг шкалы и g - относительное угловое смещение шкал. Амплитуда Ф зависит от величины относительного перемещения растров практически синусоидально, во всяком случае выбором параметров сопряжения можно получить синусный характер изменения лучистого потока Ф. В ряде схем, наоборот, стремятся получить линейный закон изменения Ф от q в пределах некоторой зоны перемещений. Для таких РОДП функцию преобразования можно представить в виде
Основу РОДП составляет растровое преобразующее звено. Оно включает блок осветителя, создающий параллельный пучок света, растровое сопряжение из подвижного (измерительного) и неподвижного (индикаторного) растров и блок фотоприемников. Модулирующие свойства растрового сопряжения определяются структурой растра и характеризуются пропускающей способностью t = Ф/Ф0, где Ф0, Ф - значения светового потока, соответственно падающего на растровое сопряжение и прошедшее через него в пределах зрачка фотоприемника. В современных конструкциях величина t достигает 0,9 …0,95. В простейших параллельных растрах кроме t выделяют еще два параметра: W - шаг шкалы и g - относительное угловое смещение шкал. Амплитуда Ф зависит от величины относительного перемещения растров практически синусоидально, во всяком случае выбором параметров сопряжения можно получить синусный характер изменения лучистого потока Ф. В ряде схем, наоборот, стремятся получить линейный закон изменения Ф от q в пределах некоторой зоны перемещений. Для таких РОДП функцию преобразования можно представить в виде

где j - пространственная фаза комбинационной полосы.
 Одним из наиболее известных принципов построения РОДП является применение однодорожечных пропускающих или отражающих решеток. На рис. 3.36 представлен пример промышленного РОДП с отражающей растровой решеткой. Он относится к датчикам накапливающего типа и для определения абсолютного значения перемещения требует использования счетных импульсов.
Одним из наиболее известных принципов построения РОДП является применение однодорожечных пропускающих или отражающих решеток. На рис. 3.36 представлен пример промышленного РОДП с отражающей растровой решеткой. Он относится к датчикам накапливающего типа и для определения абсолютного значения перемещения требует использования счетных импульсов.
На рис. 3.36 пунктиром показана сканирующая головка с четырьмя фотоприемниками. Диафрагма сканирующей головки содержит четыре щели, размещенные так, что выходные сигналы фотоприемников сдвинуты на четверть периода измерительной решетки(рис. 3.37а). Следствием этого смещения является сдвиг по фазе и квазисинусоидальных сигналов фотоприемников. Так, компонента E21 сдвинута на 90о относительно E11, а компоненты E12 и E22 имеют сдвиг на 180о по отношению к сигналам E11 и E21 (рис. 3.37б). Фотоприемники соединены друг с другом попарно и дифференциально, так что в результате образуются двухтактные схемы E11/E12 и E21/E22. Далее сигналы с этих схем поступают на соответствующий электронный каскад, включающий в себя формирователи прямоугольных импульсов (триггеры Шмитта), усилители и инверторы, преобразующие их в противофазные сигналы прямоугольной формы. В результате выходные сигналы схем E11/E12 имеют 900 фазовый сдвиг по отношению к выходным сигналам схем E21/E22 (рис. 3.38).
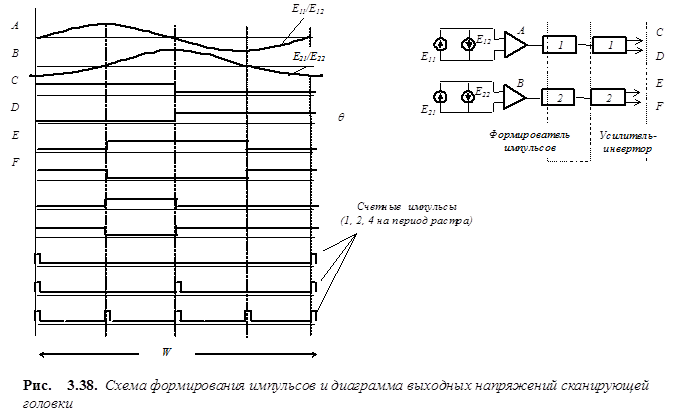
Здесь же представлены диаграммы выходных напряжений РОДП. Верхние кривые - сигналы, формируемые фотоприемниками. Последующие графики отражают временные соотношения между различными сигналами.
Особенностью данной схемы является формирование нескольких счетных импульсов за один шаг решетки W. С этой целью применяются одновибраторы, запускающиеся на положительных фронтах прямоугольных импульсов, образуя один, два либо четыре счетных импульса за один шаг. Максимальное быстродействие такого датчика ограничивается скоростью счета реверсивного счетчика импульсов. Так, при четырех импульсах на шаг и частоте счетчика равной f, Гц, граничная скорость датчика составит 4 W f, мм/с.
Во всех схемах, дополнительно к измерительной решетке предусматривается еще одна короткая дорожка для формирования фиксированной опорной метки абсолютного положения. (Она обозначается как метка начала отсчета). Этот маркер привязан к квазиабсолютной системе отсчета и используется для восстановления показаний после включения питания.
Точность РОДП определяется минимальным расстоянием между растрами фазных шкал (шагом) и количеством растровых полос на 1 мм/рад. (Это расстояние достигает у лучших датчиков 3 ... 5 мкм, а количество полос - 1000 на 1 мм).
Разрешающая способность линейных РОДП составляет 1 ... 2 мкм.
В таблице 3.11 представлены основные характеристики некоторых известных моделей РОДП.
Таблица 3.11. Примеры промышленных РОДП
| Модель | Тип | Uип, В | Диапазон 0, мм | W, мкм | e , мкм | Æ, мм | l, мм | m, кг |
| LID 300 | Линейный | 5 | 3000 | 10 | 1 | |||
| LIDА 225 | Линейный | 5 | 30000 | 100 | 3 |
Примечание. Датчики разработаны фирмой Heidenhain, Германия.
К достоинствам РОДП относятся простая и технологичная конструкция, а также малые размеры и масса. К недостаткам накопление ошибок от сбоев и помех в цепях реверсивного счетчика, потеря информации о перемещении при отказе в цепи питания, а также необходимость периодичного определения нулевого отсчета (для получения достоверного абсолютного значения измеряемого перемещения).
3.1.3.2. Импульсные оптические датчики положения
Импульсный фотоэлектрический датчик (ИОДП) преобразует значение перемещения исполнительного механизма в унитарный код, т.е. последовательность импульсов, число которых пропорционально перемещению.
Оптическая шкала ИОДП является модификацией растровой шкалы и содержит несколько дорожек разбитых на дискретные (активные и пассивные) участки.
Современные ИОДП, как правило, включают те же основные модули, что и РОДП: оптико-механическую систему (первичный преобразователь), электрическую схему считывания, а также схему определения знака (реверсивную схему).
 Оптико-механические системы простейших ИОДП выполнялись безредукторными и содержали блок осветителя, кодирующую шкалу и фотоэлемент. В современных конструкциях ИОДП шкала содержит несколько дорожек и смещенных на нецелое число шагов фотоэлементов. При такой схеме значительно уменьшается цена управляющего импульса, определяющая разрешающую способность датчика. Так, например, в датчиках фирмы Ferranti используются шкалы с 1250 ... 10000 штрихами и два фотодиода, причем штрихи дорожек смещены друг относительно друга на четверть шага (рис. 3.39). Одновибраторы измерительной схемы ИОДП формируют и подают на счетчик два импульса с обеих дорожек - по переднему и заднему фронту каждого штриха, и поэтому, при вращении вала на один оборот шкалы возбуждается импульсов в 4 раза больше числа делений. Для шкалы с 1250 штрихами это соответствует 5000 импульсам на оборот.
Оптико-механические системы простейших ИОДП выполнялись безредукторными и содержали блок осветителя, кодирующую шкалу и фотоэлемент. В современных конструкциях ИОДП шкала содержит несколько дорожек и смещенных на нецелое число шагов фотоэлементов. При такой схеме значительно уменьшается цена управляющего импульса, определяющая разрешающую способность датчика. Так, например, в датчиках фирмы Ferranti используются шкалы с 1250 ... 10000 штрихами и два фотодиода, причем штрихи дорожек смещены друг относительно друга на четверть шага (рис. 3.39). Одновибраторы измерительной схемы ИОДП формируют и подают на счетчик два импульса с обеих дорожек - по переднему и заднему фронту каждого штриха, и поэтому, при вращении вала на один оборот шкалы возбуждается импульсов в 4 раза больше числа делений. Для шкалы с 1250 штрихами это соответствует 5000 импульсам на оборот.
Для определения направление вращения вала (штока) используются шкалы, относительное смещение штрихов на дорожках которых составляет четверть шага. В этом случае, выходной сигнал с одновибратора внешней дорожки будет опережать сигнал одновибратора внутренней для одного направления движения и отставать для другого. Для определения числа целых оборотов используется репер, формирующий импульс начала отсчета. Он также используется для возврата счетчика в 0.
Фотоприемники сдвинуты друг относительно друга на расстояние L, равное:
L = (m + 1/4) W,
где W - шаг диска, m - целое число.
Знак направление движения исполнительного органа определяется логической схемой, вызывающей срабатывание соответствующего ключа (рис. 3.40).
 В данной схеме используются два канала измерения, связанные с каждой дорожкой кодовой шкалы. Триггеры Шмитта Т1, Т2, открыты в то время, когда сигналы с усилителей У1, У2 имеют положительную полярность. Это соответствует прозрачному участку кодирующей шкалы. В соответствии с расположением фотоприемников Ф1 и Ф2 сигналы с триггеров сдвинуты друг относительно друга на 1/4 периода следования, соответствующего периоду синусоидального сигнала усилителя. Дифференцирующие цепи О1, О2 (для этой цели могут использоваться одновибраторы) формируют короткие импульсы в момент переброса триггера Т2 по переднему и заднему фронту. На выходе схемы совпадения И1 появляется сигнал только тогда, когда на ее входах есть одновременно сигналы с О1 и Т1, а на выходе И2 - с О2 и Т1. Следовательно, на выходе схемы И1 сигналы появляются при движении, например, «вперед», а на выходе И2 - «назад». Количество импульсов определяет саму величину перемещения. В качестве накапливающего сумматора используется реверсивный счетчик.
В данной схеме используются два канала измерения, связанные с каждой дорожкой кодовой шкалы. Триггеры Шмитта Т1, Т2, открыты в то время, когда сигналы с усилителей У1, У2 имеют положительную полярность. Это соответствует прозрачному участку кодирующей шкалы. В соответствии с расположением фотоприемников Ф1 и Ф2 сигналы с триггеров сдвинуты друг относительно друга на 1/4 периода следования, соответствующего периоду синусоидального сигнала усилителя. Дифференцирующие цепи О1, О2 (для этой цели могут использоваться одновибраторы) формируют короткие импульсы в момент переброса триггера Т2 по переднему и заднему фронту. На выходе схемы совпадения И1 появляется сигнал только тогда, когда на ее входах есть одновременно сигналы с О1 и Т1, а на выходе И2 - с О2 и Т1. Следовательно, на выходе схемы И1 сигналы появляются при движении, например, «вперед», а на выходе И2 - «назад». Количество импульсов определяет саму величину перемещения. В качестве накапливающего сумматора используется реверсивный счетчик.
Частотные характеристики ИОДП определяются количеством штрихов-сегментов на дорожке и длительностью импульсов одновибратора, которая обычно составляет ~1/4 периода штриха. Например, для датчиков угла, с кодирующими шкалами, формирующими 1250 импульсов на оборот максимальная скорость вращения составит 5000 об/мин, 5000 импульсов - 2000 об/мин. Увеличение количества сегментов требует соответствующего увеличения и размеров шкал. В частности, типовые промышленные ИОДП содержат диск диаметром до 150 мм, на котором размещают 5000 сегментов. Разрешающая способность такого датчика составит 1:20000 на оборот, или ~ 1'.
В табл. 3.12 приведены примеры некоторых популярных моделей ИОДП.
Таблица 3.12. Примеры промышленных ИОДП
| Модель | Uип, В | N*, имп/об | w, об/мин | e, ‘ | Æ, мм | l, мм | m, кг |
| ВЕ-178 | ± 15 | 2500 | 6000 | 5 | 50 | 106 | 0,7 |
| ПУФ-МИНИ | 5 | 1024 | 6000 | 11 | 30 | 61 | 0,2 |
| ROD 800 | 5 | 36000 | 0,5 | 0,06 | 170 | 50 | 0,8 |
| mini-ROD-450 | 5 | 3600 | 3000 | 10 | 36 | 33 | 0,1 |
| TSI-110 | ± 15 | 12000 | 6000 | 1 | 70 | 75 | 0,3 |
Примечание. Датчики моделей ROD разработаны фирмой Heidenhain, Германия, TSI-110 - фирмой Tamagawa, Япония.
ИОДП в настоящее время является наиболее распространенным типом ДПП. Достоинства ИОДП - гальваническая развязка информационных цепей, а также простота и надежность конструкции обусловили подавляющее преимущество этих ДПП в типовых задачах измерения перемещений. В то же время положение измерять с помощью ИОДП затруднительно, т.к. для них характерно накопление ошибок при сбоях питания и необходимость периодического определения нуля отсчета.
3.1.3.2. Кодовые оптические датчики положения
 Рассмотренные ранее ДПП формируют выходной сигнал либо в аналоговом виде, либо, как ИОДП, в виде последовательности импульсов. Однако в большинстве случаев ДПП являются элементами цифровых систем управления, что требует преобразования выходного сигнала в цифровую форму. Именно такой сигнал формируется в кодовых фотоэлектрических датчиках (КОДП). Оптические системы КОДП и ИОДП построены похожим образом, а кодирующая шкала КОДП представляет собой стеклянное основание с нанесенной на ней кодовой маской. Маска выполнена в виде нескольких (обычно до 20) дорожек с прозрачными и непрозрачными сегментами (рис. 3.41). Количество дорожек, как правило, определяет разрядность выходного двоичного кода. Осветитель создает лучистый поток, падающий на шкалу. В момент съема информации луч, проходя через прозрачные сегменты кодовых дорожек шкалы и ограничивающую щелевую диафрагму, освещает фотоприемники (фотодиодные линейки), усиленные сигналы с которых принимаются за двоичные единицы. Отсутствие сигнала с фотоприемника соответствует двоичному нулю. В результате каждому перемещению соответствует определенная комбинация двоичных единиц и нулей, являющаяся его цифровым кодом.
Рассмотренные ранее ДПП формируют выходной сигнал либо в аналоговом виде, либо, как ИОДП, в виде последовательности импульсов. Однако в большинстве случаев ДПП являются элементами цифровых систем управления, что требует преобразования выходного сигнала в цифровую форму. Именно такой сигнал формируется в кодовых фотоэлектрических датчиках (КОДП). Оптические системы КОДП и ИОДП построены похожим образом, а кодирующая шкала КОДП представляет собой стеклянное основание с нанесенной на ней кодовой маской. Маска выполнена в виде нескольких (обычно до 20) дорожек с прозрачными и непрозрачными сегментами (рис. 3.41). Количество дорожек, как правило, определяет разрядность выходного двоичного кода. Осветитель создает лучистый поток, падающий на шкалу. В момент съема информации луч, проходя через прозрачные сегменты кодовых дорожек шкалы и ограничивающую щелевую диафрагму, освещает фотоприемники (фотодиодные линейки), усиленные сигналы с которых принимаются за двоичные единицы. Отсутствие сигнала с фотоприемника соответствует двоичному нулю. В результате каждому перемещению соответствует определенная комбинация двоичных единиц и нулей, являющаяся его цифровым кодом.
Как известно, произвольное целое число A можно представить в любой системе счисления с основанием B в виде ряда:
А = аn Вn + аn-1 Вn-1 + ... + а1 В1 + а0 В0 ,
здесь an , ... a0 - коэффициенты разрядов, они могут принимать значения от 0 до (B-1). Наибольшее распространение в цифровой измерительной технике получила двоичная система счисления, где B = 2, и, следовательно, коэффициенты аi могут принимать два значения:«0» и «1». В двоичной системе максимальное число Аmax, которое можно закодировать при n разрядах, равно Аmax = 2n - 1. Для КОДП угла разрешение шкалы составит 2p/2n . Следовательно, разрешающая способность КОДП Da определяется числом разрядов n его кодовой шкалы. Связь разрешающей способности КОДП с разрядностью кодовой шкалы иллюстрирует табл. 3.13.
Таблица 3.13. Зависимость разрешающей способности от разрядности шкалы КОДП
| Число разрядов шкалы, n | 2 | 4 | 8 | 10 | 16 |
| Разрешающая способность, Da | 90о | 22,5о | 1о24’ | 21’5” | 20” |
Вид конструктивной схемы КОДП определяется, главным образом, числом разрядов шкалы и способом кодирования и считывания. В КОДП, наиболее часто используются две схемы: КОДП с прямым двоичным кодом и КОДП с кодом Грея.
Шкалы с прямым двоичным кодом представляют собой оптические рейки или диски, разделенные на равновеликие площадки - полосы для реек и сектора - для дисков, на которых записаны бинарные слова, соответствующие прямому двоичному коду. Светлый элемент шкалы, пропускающий свет, переводит фотоэлементы в состояние «1». Темные участки шкалы соответствуют «0». Число площадок N определяет разрешающую способность КОДП: Da = L/N или Da = 3600/N . (Здесь L - длина рейки).
Несмотря на простоту кодирования и считывания шкалам с обычным двоичным кодом присущ крупный недостаток, связанный с появлением ложный кодов. Эта особенность обусловлена невозможностью изготовления идеальных шкал и проявляется во время движения шкалы, в момент изменения «1» на «0» или «0» на «1» одновременно в нескольких разрядах. Так, при изменении кода 15 на 16, т.е. 01111 на 10000 происходит замена значений сразу в пяти разрядах. Если же, случайно (из-за погрешностей шкалы), например, во 2 разряде, не происходит изменение «1» на «0», тогда вместо значения «16» будет считано «18» (10010). Существенно, что величина ошибки превышает цену деления шкалы, равную одному младшему значащему разряду (МЗР). Вероятность возникновения неоднозначности считывания информации в КОДП особенно велика при высоких скоростях движения шкалы.
Для устранения неоднозначности считывания применяются специальные методы считывания и специальные коды.
Одним из таких методов является V-считывание, особенно распространенное в контактных ДПП (рис. 3.42). Здесь сохраняется обычная двоичная шкала, но на каждой дорожке, кроме младшей используется по два приемника.
 Один приемник (условно называемый опережающим) устанавливается относительно опорной линии считывания чуть впереди, а другой (отстающий) - чуть сзади (рис. 3.42). Каждая пара таких фотоприемников подключается к отдельной логической схеме, обеспечивающей идентификацию истинного значения считываемого разряда (рис. 3.43). Считывание в МЗР осуществляется одним фотоприемником. Он установлен точно по опорной линии считывания. Расстояние между приемниками в других парах составляют 1x, 2x, 4x, 8x и т.д., где x - длина элементарного приращения (одного МЗР) в мм. МЗР изменяется на каждом шаге, поэтому сигнал с первой дорожки используется для управления приемниками следующей дорожки. Алгоритм работы логической схемы основан на анализе изменения состояния разрядных дорожек. Если двоичное число увеличивается, то при изменении МЗР от «0» к «1» другие разряды своего состояния не изменяют. Если же состояние МЗР меняется от «1» к «0», то должно изменяться состояние, по крайней мере, еще одного из разрядов. Данный алгоритм реализуется аппаратно с помощью схемы, представленной на рис.
Один приемник (условно называемый опережающим) устанавливается относительно опорной линии считывания чуть впереди, а другой (отстающий) - чуть сзади (рис. 3.42). Каждая пара таких фотоприемников подключается к отдельной логической схеме, обеспечивающей идентификацию истинного значения считываемого разряда (рис. 3.43). Считывание в МЗР осуществляется одним фотоприемником. Он установлен точно по опорной линии считывания. Расстояние между приемниками в других парах составляют 1x, 2x, 4x, 8x и т.д., где x - длина элементарного приращения (одного МЗР) в мм. МЗР изменяется на каждом шаге, поэтому сигнал с первой дорожки используется для управления приемниками следующей дорожки. Алгоритм работы логической схемы основан на анализе изменения состояния разрядных дорожек. Если двоичное число увеличивается, то при изменении МЗР от «0» к «1» другие разряды своего состояния не изменяют. Если же состояние МЗР меняется от «1» к «0», то должно изменяться состояние, по крайней мере, еще одного из разрядов. Данный алгоритм реализуется аппаратно с помощью схемы, представленной на рис.
 В соответствии с алгоритмом, выходной сигнал для дорожки следующего по старшинству разряда считывается с запаздывающего приемника, если для двух из них на дорожке предыдущего разряда истинный выходной сигнал соответствует «1» . Если же для данной дорожки истинным является выходной сигнал «0» , то с дорожки следующего по старшинству разряда сигнал будет считываться с опережающего приемника. Синхронизация всех разрядов производится сигналом МЗР. Таким образом, логическая схема определяет, который из двух приемников каждой дорожки имеет истинный выходной сигнал.
В соответствии с алгоритмом, выходной сигнал для дорожки следующего по старшинству разряда считывается с запаздывающего приемника, если для двух из них на дорожке предыдущего разряда истинный выходной сигнал соответствует «1» . Если же для данной дорожки истинным является выходной сигнал «0» , то с дорожки следующего по старшинству разряда сигнал будет считываться с опережающего приемника. Синхронизация всех разрядов производится сигналом МЗР. Таким образом, логическая схема определяет, который из двух приемников каждой дорожки имеет истинный выходной сигнал.
Другой путь повышения надежности преобразования основан на применении циклического кода Грея, разработанного в Массачусетском технологическом институте, США в 1953 году. Большинство выпускаемых промышленно КОДП используют именно этот код, при котором ошибка считывания не превышает величины МЗР, независимо от того, в каком из разрядов произошла ошибка. Иллюстрация этого обстоятельства приведена в табл. 3.14.
Недостатком датчиков, использующих шкалы с кодом Грея, является необходимость последующей дешифрации кодов Грея в стандартный двоичный код.
Обозначим некоторое число в двоичном коде как B = bn bn-1 ... b2 b1 , и его же в коде Грея как G = gn gn-1 ... g2 g1. Тогда, для преобразования его из двоичного кода в код Грея справедливо выражение:
gk = bk+1 Å bk (mod 2)
Сложение по модулю 2 (неравнозначность) реализуется по следующему алгоритму: 1 + 1 = 0, 0 + 0 = 0, 0 + 1 = 1, 1 + 0 = 1.
Таблица 3.14. Таблица перевода двоичных кодов
| Десятичное число | Двоичный код | Код Грея | |||
| 0 1 2 3 4 5 6 7 8 | 9 10 11 12 13 14 15 16 | 00000 00001 00010 00011 00100 00101 00110 00111 01000 | 01001 01010 01011 01100 01101 01110 01111 10000 | 00000 00001 00011 00010 00110 00111 00101 00100 01100 | 01101 01111 01110 01010 01011 01001 01000 11000 |
Промышленно выпускаются одношкальные и двухшкальные КОДП (с системой ГО и ТО). Самые современные датчики первого типа имеют 12 … 16 разрядную шкалу, двухшкальные КОДП содержат две 7… 9 разрядных шкалы. И та и другая схемы позволяют получить 16 разрядный двоичный код и гарантировать разрешающую способность до 20 ".
Некоторые модели КОДП представлены в табл. 3.15.
Таблица 3.15. Примеры промышленных КОДП
| Модель | n, разряд | K , шкал | N, об | Da, ‘ | w, об/мин | Æ, мм | l, мм | m, кг |
| ППК-15 | 15 | 2 | 16 | 10,5 | 900 | 50 | 160 | 0,8 |
| ROC 717 | 17 | 1 | 0,2 | 0,6 | ||||
| TSI-200 | 20 | 2 | 0,5 | 70 | 75 | 0,4 |
Примечание.
1. Датчики ROC и TSI-200 изготовлены фирмами Heidenhain, Германия и Tamagawa, Япония.
2. Датчики ROC используются в системах управления солнечными батареями и антеннами радиостанций.
В настоящее время все самые современные системы измерения перемещений строятся на основе КОДП. Их достоинства связаны с возможностью непосредственного получения двоичного кода и высокой точностью измерений. Недостатки этих датчиков обусловлены технологической сложностью и высокой стоимостью, а также значительными габаритами.
3.1.3.3. Прецизионные оптические датчики положения
При построении прецизионных ОДП (ПОДП) используются все способы фотоэлектрического преобразования. Высокая точность в таких системах достигается не только благодаря внедрению самых современных технологических достижений, но и применением оригинальных схемотехнических приемов. Наиболее известными решениями являются двушкальные схемы со шкалами ГО и ТО, а также одношкальные конструкции с совмещенной кодово-растровой сегментацией. В обоих случаях выделяются два канала преобразования (их тоже называют ТО и ГО), причем в одношкальных схемах оба канала построены на базе одной оптической шкалы. Таким образом, в двухшкальных схемах канал ТО реализуется с помощью отдельной шкалы ТО, а в одношкальных на базе специальных дорожек или с помощью растровой интерполяции. В соответствии с этим системы ТО ПОДП разделяют на дорожечные и интерполяционные.
Угловые ПОДП шкального типа содержат отдельный диск ТО, связанный с входным валом датчика либо непосредственно, либо через редуктор, либо редуктор и диск ГО. В первом случае, датчик является однооборотным, во втором - многооборотным с числом оборотов, определяемым редукцией или разрядностью диска ГО. В дорожечных системах ТО младшие несколько дорожек выполняют штриховыми и при преобразовании используют импульсные или растровые схемы. ПОДП с интерполяционными системами ТО не используют кодовых шкал; их диски выполняют со штриховым рисунком, а схемы считывания содержат фазовращательные устройства, формирующие несколько прямоугольных импульсов на один оптический импульс (штрих шкалы).
Наиболее эффективным методом построения ПОДП, пожалуй, является растровая интерполяция. В общем случае, ее суть заключается в том, чтобы с помощью сигналов, считываемых с одной растровой дорожки получить k-разрядный кодовый сигнал. Схемы этого типа используют синусно-косинусные преобразователи и позволяют получить 22 … 37 разрядный выходной сигнал.
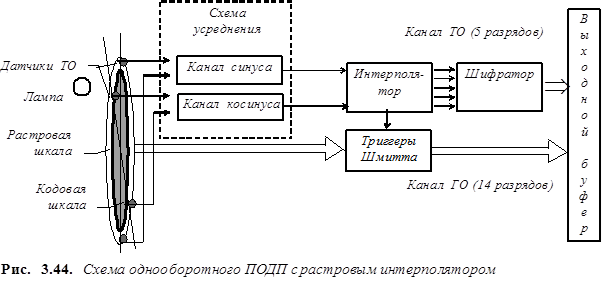
На рис. 3.44 представлена схема 19-ти разрядного углового ПОДП. Показания ГО снимаются с 14 старших разрядных дорожек кодовой шкалы. Канал ТО построен на базе штриховой растровой разрядной дорожки, шаг которой W равен:
W = 2p /215 рад
Таким образом, конструктивно шкала представляет собой 14 дорожек ГО и 1 дорожку ТО. В канале ТО используется растровая интерполяция, позволяющая увеличить разрядность канала ТО до 5. С этой целью в канал ТО включены 4 пары фотоприемников, расположенных через 900 вдоль внешней разрядной дорожки и растровое сопряжение подвижного (измерительного) и неподвижного (индикаторного) растров. Симметричное расположение фотоприемников позволяет устранить влияние эксцентриситета и эллиптичности шкалы. Растры, как обычно, сдвинуты друг относительно друга на 1/4 шага и, следовательно, с каждой пары фотоприемников снимаются электрические сигналы, пропорциональные синусу и косинусу угла поворота. Эти сигналы поступают на схемы усреднения и интерполятор, представляющий собой потенциометрический фазовращатель в виде резистивного моста. Схема интерполирования преобразует синусоидальный и косинусоидальный входные сигналы в группу сигналов, сдвинутых по фазе относительно исходных. В результате, на выходе интерполятора образуется 32 синусных сигнала, смещенных друг относительно друга на 360:32 = 11,25о. В данном случае 360о соответствуют одному шагу измерительного растра ТО. Каждая из 16 пар противофазных сигналов подается на соответствующий триггер Шмитта, и, следовательно, при вращении измерительного растра ТО сигналы с выходов триггеров будут иметь вид прямоугольных меандров. Эти меандры также сдвинуты друг относительно друга на 11,250 по фазе. Шифратор на логических элементах кодирует состояние триггеров Шмитта в 5-ти разрядный двоичный код ТО, пропорциональный перемещению измерительного растра ТО в пределах шага W. (5 двоичных разрядов соответствует 32 комбинациям сигналов). Растровый интерполятор ТО формирует также синхроимпульс считывания выходных сигналов с разрядных дорожек ГО, обеспечивая, тем самым, необходимое согласование каналов ТО и ГО.
Датчик представленный на рис. 3.44 содержит один двухканальный диск, и его разрешающая способность соответствует 2,5". Известны модификации таких датчиков с диском диаметром 10 дюймов (254 мм), и разрешающей способностью до 0,6".
Рассмотренный одношкальный ПОДП выполняет полное преобразование за один оборот. При необходимости многооборотного преобразования наиболее часто применяются двушкальные схемы. Одной из первых, конструкцию такого ПОДП разработала фирма Litton, Англия. Конструктивно такая же схема и у отечественного датчика ДПК-1, установленного в модификациях отечественных ПР семейства «Универсал» со стойкой управления РПМ-25. Датчик ДПК-1 (рис. 3.45) содержит кодовые диски ТО и ГО на которых нанесены маски в циклическом коде Грея. Диски представляют собой точные оптические шкалы, изображение которых проецируется в проходящем свете через диафрагму на фотодиодную матрицу. На диске ТО размещены 8 кодовых дорожек, на диске ГО - 7. Каждая разрядная дорожка считывается отдельно и непрерывно во времени. Оси обоих дисков связаны друг с другом и с входным валом датчика через редуктор, причем передаточное число между ними равно 128. При такой редукции за полный цикл преобразования диск ГО делает 1 оборот, а диск ТО - 128.
В общем случае, для кодовых многооборотных датчиков число оборотов диска ТО NТО за полный диапазон преобразования определяется выражением: NТО = 2nГО, где nГО - число разрядных дорожек диска ГО. Если разрядные дорожки диска ГО располагаются равномерно по окружности диска, то угол его поворота за полный диапазон преобразования составляет 2p рад. Обычно, для повышения точности датчика число разрядных дорожек на диске ТО выбирается максимальным и он устанавливается на входной вал датчика. Тогда, абсолютная точность преобразования по входу соответствует точности изготовления маски диска ТО, а диапазон преобразования угла D1 равен:
D1 = 2nТО оборотов.
Полный диапазон преобразования ДПК-1 по входу D1 составляет 16 оборотов входного вала, по выходу - 15 двоичных разрядов. (Число разрядов выходного кода равно суммарному числу разрядных дорожек обоих дисков: n0 = nТО + nГО = 8 + 7 = 15).
В двушкальных схемах очень важно правильное согласование шкал. Коммутация кодовых участков любой разрядной дорожки диска ГО должна совершаться в пределах угла поворота диска ТО, при котором его младшая разрядная дорожка перемещается на величину, не превышающую половины кодового участка: DaТО = p/2nто, где nТО - число разрядных дорожек в коде Грея, нанесенных на диск ТО. Приведенный к валу диска ГО этот угол равен: DaГО = 2p / 2nто i. Здесь i - коэффициент редукции между дисками. (Для датчика ДПК-1 DaТО = 2,8о, DaГО = 0,02о).
Для согласования шкал используется диафрагма и маска с системой одновитковых спиралей. (Число спиралей равно числу кодовых дорожек на диске ГО, шаг спирали равен величине перемещения соответствующей разрядной дорожки диска ГО за один оборот диска ТО). Угловая ширина щелей диафрагмы не должна превышать ширины щелей дорожки младшего разряда кодовой маски. Если угловую ширину щелей выбрать одинаковой независимо от номера разряда, то ее линейная ширина h будет зависеть от радиуса, на котором расположена считываемая дорожка: h = RDaд , где Daд < DaТО/2 - для диска ТО, Daд < DaГО/2 - для диска ГО. Для ДПК-1 на радиусе диска, равном 30 мм h = 1,5 мм для канала ТО и 0,02 мм для канала ГО.
Современные ПОДП, использующие различные принципы оптического преобразования применяются в информационных системах особо высокой точности (в прецизионных станках, системах управления антенн и телескопов и т.д.). Некоторые из датчиков этого типа представлены в табл. 3.16. Символом t обозначен срок непрерывной работы, V - скорость преобразования.
Таблица 3.16. Примеры промышленных ПОДП
| Модель | n, разряд | K , шкал | t, час | Da, “ | V, отсчетов/с | Æ, мм | l, мм | m, кг |
| ФПУ-16 | 16 | 1 | 10000 | 20 | 20000 | 70 | 140 | 0,9 |
| Special/RI | 27 | 1 | 0,02 | 310 | 85 | 2,1 |
Примечания.
1. Опытная модель Special/RI заявлена фирмой IMEKA, Германия.
2. Скорость преобразования ПОДП V ограничивается частотными возможностями фотодиодных матриц. Обычно она не превышает 5 ... 10 кГц.
Итак, в этой главе мы рассмотрели различные типы датчиков положения и перемещения, используемых робототехнических и мехатронных системах. В заключение приведем сравнительные характеристики различных типов ДПП: в табл. 3.17 представлены их общие характеристики, в табл. 3.18 - сравнительные точностные характеристики, а в табл. 3.19 - технические параметры известных отечественных ИОДП.
Таблица 3.17. Общие характеристики принципов преобразования
| Принцип преобразования | Пример датчика | Способ формирования выходного сигнала | Разрешающая способность, разряд | Время преобразования, с |
| Электромеханический | РДП | аналоговый/кодовый | 5 ... 7 | 0,001 ... 0,01 |
| Индукционный | ЭДП | фазовый | 14 ... 18 | 0,001 |
| Фотоэлектрический | ОДП | фазовый кодовый | 16 ... 18 14 ... 17 | 0,01 ... 0,1 0,001 |
Анализ табл. 3.17 показывает, что использование информации о фазе сигнала позволяет получить лучшие показатели быстродействия и точности в преобразователях всех типов.
Таблица 3.18. Сравнительные точности ДПП
| Тип преобразователя | Погрешность датчика, ‘ | |
| 0 ... 1 | 1 ... 10 | |
| РДП |
| |
| Р | ||
| РД | ||
| И | ||
| КОДП | ||
| РОДП (ПОДП) |
Как следует из табл. 3.18 наивысшей точностью из всех ДПП обладают РОДП и использующие те же принципы ПОДП.
Таблица 3.19. Паспортные данные некоторых ИОДП
| Параметр | Модель датчика | ||
| ВЕ-178 | ПУФ-МИНИ | ||
| Форма выходных сигналов | прямоугольная | прямоугольная | |
| Количество выходных сигналов и их тип: основной инверсный основному смещенный инверсный смещенному начало отсчета инверсный начала отсчета | 6 | 3 | |
| + + | + + - - + - | ||
| Количество импульсов на один оборот вала | 250, 600, 1000, 1024, 1500, 2000, 2500, 5000 | 100, 128, 250, 256, 500, 512, 1000, 1024 | |
| Максимальная частота вращения входного вала, об/мин | 6000 | 6000 | |
| Напряжение питания, В | ± 15 | 5 | |
| Мощность, Вт, не более | 2,3 | 1 | |
| Сопротивление нагрузки, кОм | 1 | 0,15 | |
| Масса, кг, не более | 0,67 | 0,2 | |
| Габариты, мм | Лекция "35 Типичные признаки в анализе крови" также может быть Вам полезна. Æ 50´106 | Æ 30´62 | |
| Средняя наработка на отказ, час, не менее | 8000 | 16000 |
Вопросы для самостоятельной подготовки
- Зависит ли линейность резистивного датчика положения или резольвера от нагрузки?
- В чем отличие индуктивного и индукционного датчиков?
- Как ориентированы силовые линии резольвера?
- Что такое и зачем используется электрическая редукция?
- Зачем в электромагнитных датчиках положения используются многополюсные обмотки?
- Почему решетки ротора индутосинов смещены друг относительно друга на 1/4 шага?
- Зачем в растровых датчиках используется интерполяция?
- Позволяет ли код Грея увеличить точность кодового датчика положения?
- В чем отличие унитарного и прямого двоичного кодов?
- Чему равна погрешность импульсного датчика, диск которого содержит 5000 штрихов?


















