


Управляемость автомобиля
Лекция 12. Управляемость автомобиля
План лекции
12.1. Поворот автомобиля
12.2. Силы, действующие на автомобиль при повороте
12.3. Увод колес автомобиля
12.4. Колебания управляемых колес
Управляемость автомобиля — одно из важнейших эксплуатационных свойств, определяющих возможность его безопасного движения с большими средними скоростями, особенно на дорогах с интенсивным движением.
12.1. Поворот автомобиля
Основными параметрами, характеризующими поворот автомобиля, являются радиус поворота и положение центра поворота.
На рис. 12.1 и 12.2 представлены схемы поворота автомобиля с жесткими и эластичными колесами. Точка О представляет собой центр поворота. Она находится на пересечении перпендикуляров, проведенных к векторам скоростей всех колес (мостов) автомобиля. Радиус поворота R (RЭ) представляет собой расстояние от центра поворота до продольной оси автомобиля.
Для автомобиля с жесткими колесами (см. рис. 12.1), у которого векторы скоростей колес совпадают с плоскостью их вращения, центр поворота лежит на продолжении оси задних колес, а радиус поворота (из  ОАБ)
ОАБ)
Рекомендуемые материалы

где L — база автомобиля; θ — угол поворота управляемых колес.
Рис. 12.1. Схема поворота автомобиля с жесткими колесами:
О — центр поворота; А, Б — центры осей
передних и задних колес; v1 v2 — векторы
скоростей передних и задних колес
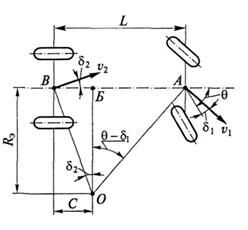
Рис. 12.2. Схема поворота автомобиля с эластичными колесами:
О — центр поворота; А, В — центры осей передних и задних колес; С — расстояние между центром В оси задних колес и точкой Б — проекцией центра поворота на продольную ось автомобиля; vb v2 — векторы скоростей передних и задних колес
Следовательно, радиус поворота автомобиля R с жесткими колесами зависит только от утла поворота управляемых колес.
Для автомобиля с эластичными колесами (см. рис. 12.2), векторы скоростей которых не совпадают с плоскостью их вращения, центр поворота находится на некотором расстоянии С от оси задних колес, а радиус поворота (из  ОАБ и ОБ В)
ОАБ и ОБ В)
где δ1 δ2 — углы увода передних и задних колес (мостов).
Таким образом, радиус поворота автомобиля с эластичными колесами зависит от угла поворота управляемых колес и углов увода передних и задних колес, обусловленных их эластичностью при действии боковой силы.
С учетом радиуса поворота R3 находим расстояние С (из ОБВ):

Следовательно, положение центра поворота автомобиля с эластичными колесами зависит от угла поворота управляемых колес и углов увода передних и задних колес (мостов).
В технической характеристике автомобиля указывается наименьший радиус поворота по колее переднего наружного колеса. Этот радиус определяется экспериментально при максимальном повороте управляемых колес.
Радиус поворота автомобиля по колее переднего наружного колеса можно определить по следующей формуле:
по следующей формуле:
где В — колея передних колес.
12.2. Силы, действующие на автомобиль при повороте
Процесс движения автомобиля на повороте включает в себя три фазы (рис. 12.3, а): вход в поворот (участок АБ), поворот (БВ) и выход из него (ВГ).
При входе в поворот управляемые колеса двигавшегося прямолинейно автомобиля поворачиваются, и он движется по кривой уменьшающегося радиуса.
При повороте управляемые колеса повернуты на определенный угол, и движение происходит по кривой постоянного радиуса.
При выходе из поворота управляемые колеса возвращаются в нейтральное положение, и автомобиль движется по кривой увеличивающегося радиуса, а затем — прямолинейно.
Во время движения на повороте на автомобиль (рис. 12.3, б) действуют следующие силы: центробежная Рц и ее поперечная Ру и продольная Рх составляющие, а также поперечные реакции дороги: Ry1 — на передний и ЕУ2 — на задний мосты.
Основной действующей силой при повороте является поперечная составляющая Ру центробежной силы, которая направлена перпендикулярно продольной оси автомобиля и представляет собой сумму трех сил:
Сила Р'у всегда возникает при криволинейном движении. Она пропорциональна квадрату скорости и действует в процессе всего поворота. Сила Р''у появляется в результате изменения угла поворота управляемых колес и действует при входе и выходе из поворота. Сила Р"'у возникает вследствие изменения скорости движения и действует только при неравномерном движении на повороте. Из трех указанных составляющих наибольшее значение имеет сила Р'у, на долю которой приходится 80 % силы Ру. Поэтому для автомобилей общего назначения и специализированных автомобилей силами Р''у и Р"'у пренебрегают.
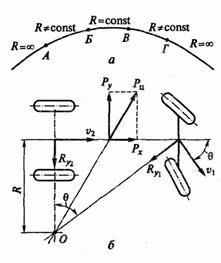
Рис. 12.3. Поворот автомобиля:
а — фазы процесса поворота; б — силы, действующие при повороте; А —Г — характерные точки траектории поворота автомобиля; vu v2 — векторы скоростей передних и задних колес
Их учитывают только для специальных автомобилей (пожарные, автомобили «скорой помощи» и др.), движущихся на поворотах с более высокими скоростями.
При равномерном движении на повороте поперечная составляющая центробежной силы

Она пропорциональна квадрату скорости движения, поэтому быстро возрастает при увеличении скорости.
Поперечные реакции дороги на передний и задний мосты при равномерном движении на повороте
Из этих выражений следует, что центробежные силы, действующие на передний и задний мосты, можно считать пропорциональными приходящемуся на них весу G1 и G2.
12.3. Увод колес автомобиля
Уводом колеса называется его свойство катиться под углом к плоскости своего вращения вследствие действия боковой силы.
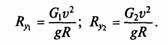
Эластичное колесо (рис. 12.4) при отсутствии боковой силы катится в плоскости своего вращения, а при действии боковой силы — под некоторым углом.
Угол 5ув, образованный вектором скорости vK колеса и плоскостью его качения, называется углом увода.
На рис. 12.5 показана зависимость угла увода колеса от приложенной к нему поперечной силы. Кривая ОАБВ включает в себя следующие характерные участки: ОА — увод колеса при отсутствии бокового скольжения шины (δув= 4...6°); АБ — увод с частичным боковым проскальзыванием шины; БВ— полное скольжение шины вбок при Ру = Рси (δув = 12... 15°).
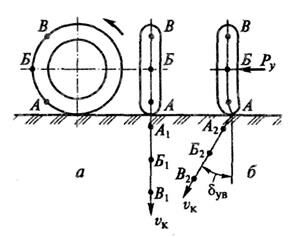
Рис. 12.4. Качение эластичного колеса
при отсутствии (а) и действии (б)
боковой силы:
А—В, А1 — В1 , А2—В2 — характерные точки колеса
Рис. 12.5. Зависимость угла увода
колеса от поперечной силы: А—В — характерные точки кривой
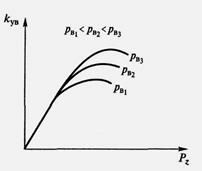
Рис. 12.6. Зависимости коэффициента сопротивления уводу колеса от вертикальной нагрузки на него и давления воздуха в шине:
РВ1 —РВз — значения давления воздуха в шине
Угол увода колеса можно определить по формуле

где kув — коэффициент сопротивления уводу колеса.
Коэффициент сопротивления уводу колеса зависит от размеров и конструкции шины, давления воздуха в ней и вертикальной нагрузки на колесо. Так, при увеличении размеров шины и давления воздуха в ней коэффициент сопротивления уводу возрастает. При увеличении вертикальной нагрузки на колесо он сначала растет, а затем уменьшается (рис. 12.6). Для шин грузовых автомобилей и автобусов значения этого коэффициента составляют 30... 100 кН/рад, а для шин легковых автомобилей — 15...40 кН/рад. От значения коэффициента сопротивления уводу во многом зависит боковое скольжение колеса. Чем меньше этот коэффициент, тем раньше начинается боковое скольжение.
12.4. Колебания управляемых колес
В процессе движения управляемые колеса автомобиля могут совершать колебания вокруг шкворней (осей поворота) в горизонтальной плоскости. Такие колебания вызывают износ шин и рулевого привода, повышают сопротивление движению и увеличивают расход топлива. Они могут привести к потере управляемости автомобиля и снижению безопасности движения. Причинами, вызывающими эти колебания, являются гироскопическая связь управляемых колес, их неуравновешенность (дисбаланс) и двойная связь колес с несущей системой (рама, кузов) через рулевой привод и подвеску.
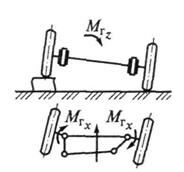
Рис. 12.7. Схема возникновения самовозбуждающихся колебаний (автоколебаний) управляемых колес при зависимой подвеске
При наездах одного из колес на дорожные неровности при зависимой их подвеске (рис. 12.7) происходит перекос переднего моста. Управляемые колеса наклоняются, и изменяется положение их оси вращения. Это приводит к возникновению гироскопического момента Мrх, который действует в горизонтальной плоскости и поворачивает управляемые колеса вокруг шкворней.
Поворот колес вокруг шкворней вызывает возникновение другого гироскопического момента Mrz, который действует в вертикальной плоскости и стремится увеличить перекос моста и наклон колес.
Таким образом, перекос моста обусловливает колебания управляемых колес вокруг шкворней, а они, в свою очередь, увеличивают перекос моста, т.е. обе колебательные системы связаны между собой и влияют друг на друга.
Возникающие в этом случае колебания управляемых колес вокруг шкворней непрерывно повторяются (самовозбуждаются), являются устойчивыми и наиболее опасными.
При вращении неуравновешенного колеса (рис. 12.8) возникает центробежная сила Рц. Ее вертикальная составляющая Pz стремится переместить колесо в вертикальном направлении и наклонить его, что вызывает появление гироскопического момента Мх. Горизонтальная составляющая Рх центробежной силы стремится повернуть колесо вокруг шкворня. Колебания управляемых колес становятся особенно значительными, когда не уравновешены оба колеса и неуравновешенные части располагаются с разных сторон осей вращения, так как в этом случае поворачивающие моменты Мх складываются. Колебания также возрастают при увеличении скорости движения автомобиля в связи с тем, что значения составляющих Pz и Рх центробежной силы Рц во многом зависят от скорости.
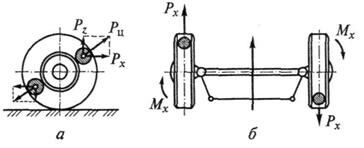
Рис. 12.8. Дисбаланс управляемых колес:
а — силы, действующие на неуравновешенные колеса; б — схема возникновения поворачивающего момента
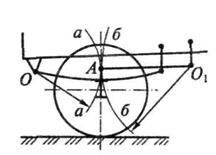
Рис. 12.8. Связь управляемых колес с несущей системой автомобиля:
А — шарнир; О, О, — центры колебаний; аа, бб — траектории перемещения шарнира
Управляемые колеса автомобиля имеют двойную связь с его несущей системой, которая осуществляется через подвеску и рулевой привод.
Люди также интересуются этой лекцией: 23 Характеристика российской промышленности.
При вертикальных перемещениях колеса (рис. 12.8) шарнир А, соединяющий продольную рулевую тягу с рычагом поворотного кулака, должен перемещаться по дуге бб с центром в точке O1 что обусловлено кинематикой рулевого привода.
Кроме того, шарнир А также должен перемещаться по дуге аа с центром в точке О, что связано с особенностями кинематики подвески. Однако дуги аа и бб расходятся, поэтому вертикальные перемещения управляемых колес сопровождаются их поворотом вокруг шкворней.
Колебания управляемых колес вокруг шкворней совершаются с высокой и низкой частотой.
Колебания высокой частоты, превышающей 10 Гц, с амплитудой не более 1,5...2° происходят в пределах упругости шин и рулевого привода. Эти колебания не передаются водителю и не приводят к нарушению управляемости автомобиля, так как поглощаются в рулевом управлении. Однако высокочастотные колебания вызывают дополнительный износ шин и деталей рулевого привода, повышают сопротивление движению автомобиля и увеличивают расход топлива.
Колебания низкой частоты (менее 1 Гц) с амплитудой 2...30 нарушают управляемость автомобиля и безопасность движения. Для их устранения необходимо снизить скорость автомобиля.
Полностью устранить колебания управляемых колес вокруг шкворней невозможно — их можно только уменьшить. Это обеспечивается применением независимой подвески управляемых колес, что ослабляет гироскопическую связь между ними, применением балансировки колес, благодаря чему устраняется их неуравновешенность, уменьшением влияния двойной связи колес с несущей системой, что достигается принятием различных конструктивных мер.



















