
Немеханические автоматические регуляторы
5. Немеханические автоматические регуляторы
5.1 Пневматические и гидравлические регуляторы
Пневматические регуляторы. По мере роста угловой скорости вала двигателя увеличивается расход воздуха в единицу времени, скорость его движения и, следовательно, разрежение во впускном коллекторе 10 (рис. 5.1). На этой зависимости основана работа пневматического регулятора.
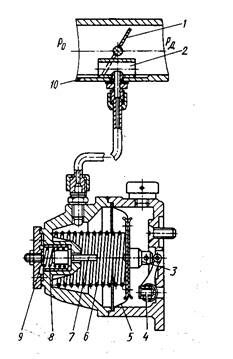
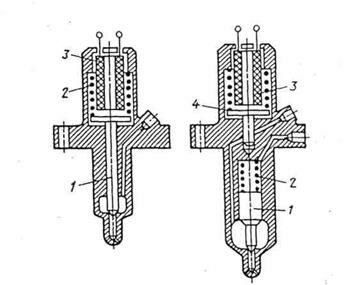
Рис. 5.1 Схема всережимного пневматического регулятора: 1 – дроссельная заслонка; 2- патрубок; 3 – муфта; 4 – рычаг переключения; 5 – диафрагма; 6, 8 – пружины; 7 – упор; 9 – стакан; 10 – впускной коллектор
Впускной коллектор 10 двигателя трубопроводом соединен с замкнутой полостью чувствительного элемента, отделенной диафрагмой 5 от объема, связанного с атмосферой. Объем воздуха, поступающего через впускной коллектор в цилиндры двигателя, определяется соотношением
 (5.1)
(5.1)
Рекомендуемые материалы
где id - число цилиндров, обслуживаемых данным патрубком; Vh - рабочий объем одного цилиндра; ηv - коэффициент наполнения; τd - тактность двигателя.
При выбранном положении дроссельной заслонки, т.е. при определенном проходном сечении μf впускного патрубка, скорость движения воздуха при постоянстве его плотности ρв можно определить из соотношения:
 (5.2)
(5.2)
где  Δp = po - pd ; po – атмосферное давление; pd – давление за дроссельной заслонкой. Следовательно:
Δp = po - pd ; po – атмосферное давление; pd – давление за дроссельной заслонкой. Следовательно:
 (5.3)
(5.3)
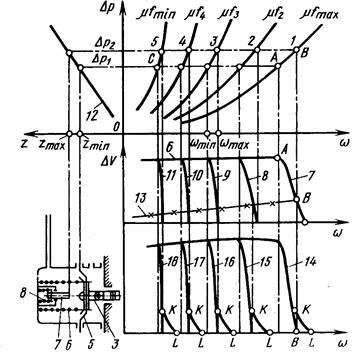
В дизелях нецелесообразно уменьшать наполнение цилиндра воздухом, поэтому во впускном коллекторе допускается малое разрежение Δр (до 0,004 МПа). При таких разрежениях положение дроссельной заслонки и изменение скоростного режима двигателя слабо влияют на изменение плотности воздуха ρв и коэффициента наполнения ηv). В связи с этим последние с достаточной степенью точности (при качественном анализе) могут быть приняты постоянными. При таких условиях зависимость (5.3) дает возможность построить характеристики 1-5, приведенные на рис. 5.2, а.
б) а)
Рис. 5.2 Образование регуляторных характеристик при всережимном пневматическом регуляторе:
а) 1…5 – зависимости разрежения от угловой скорости вала двигателя при различных открытиях дроссельной заслонки; 6– характеристики полной подачи топлива; 7…11– регуляторные характеристики подачи топлива; 12- зависимости перемещения рейки от разрежения; 13- характеристики подачи топлива на холостом ходе; 14…18- регуляторные характеристики двигателя; б) поз. 3…8 соответствуют аналогичным позициям на рис. 5.1.
Автоматическое перемещение рейки, связанной с диафрагмой, осуществляется только изменением разрежения Δр, поэтому крайние положения рейки соответствуют предельным разрежениям во впускном патрубке двигателя: Δр1 - минимальному при полной подаче топлива и Δр2 - максимальному при выключении подачи топлива.
Разрежение Δр1 создает на диафрагме 5 (рис. Р5.2, б) чувствительного элемента усилие, которое при равновесном ее положении равно усилию предварительной деформации пружины 6 регулятора. Следовательно, при всех разрежениях, равных или меньших Δр1, муфта 3 регулятора находится в крайнем правом положении и поддерживает рейку топливного насоса на упоре полной подачи топлива (кривая 6 на рис. 5.2, а). По мере увеличения разрежения Δр > Δр1 диафрагма перемещается влево, деформируя пружину 6 регулятора (связь разрежения Δр с перемещением z муфты регулятора представлена кривой 12). Рейка при этом перемещается в сторону выключения подачи топлива, причем угловая скорость вала, при которой начинается деформация пружины, определяется положением дроссельной заслонки чем больше она открыта, тем при большей угловой скорости начинается уменьшение подачи топлива и достигается разрежение Δр2, при котором подача топлива прекращается (кривые 1-5)
Гидравлические регуляторы. В гидравлическом регуляторе прямого действия (рис. 5.3) в качестве рабочего тела может быть использовано машинное масло или топливо. Топливо насосом 1 подается в цилиндр 4. Избыток его через дросселирующую иглу 15 и перепускной клапан 17 сливается в бак 18.
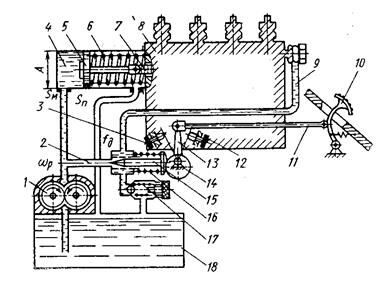
Рис. 5.3 Схема всережимного гидравлического регулятора с чувствительным элементом:
1 – подкачивающий насос; 2 – канал перепуска; 3, 12 – упоры; 4 – цилиндр; 5 – поршень; 6, 16 – пружины; 7 – рейка; 8 – топливный насос; 9 – подвод топлива; 10 – педаль управления; 11 – тяга; 13 – рычаг; 14 – эксцентрик; 15 – дросселирующая игла; 17 – перепускной клапан; 18 – топливный бак
В цилиндре 4 расположен поршень 5, связанный с рейкой 7 топливного насоса 8. Его положение обусловливается равенством сил, создаваемых с одной стороны пружиной 6, с другой - давлением топлива в левой полости цилиндра 4. При возрастании угловой скорости вала двигателя усиливается подача топлива насосом, что влечет за собой увеличение давления в цилиндре 4 и перемещение поршня 5 вместе с рейкой 7 в сторону уменьшения подачи топлива. Всережимность регулятора может быть обеспечена перестановкой иглы 15 рычагом 13 и педалью 10 управления или изменением предварительной деформации пружины 6.
5.2 Электрические (электронные) автоматические регуляторы.
К двигателю внутреннего сгорания в современных условиях предъявляются все более повышенные требования по экономичности, приемистости, удобству настройки и обслуживания, составу отработавших газов в широком диапазоне скоростных и нагрузочных режимов.
Анализ конструктивных средств решения этих задач автоматическими регуляторами различных типов показал, что лучшими возможностями в этом отношении обладают электрические САР. Они могут содержать различные электронные блоки (микропроцессоры и мини -ЭВМ), осуществляющие непрерывный синтез информации о состоянии рабочего процесса и внешних условий и вырабатывающие для каждого мгновенного состояния двигателя наиболее целесообразное (а при наличии ЭВМ - и оптимальное) решение, определяющее вид команды на исполнительное устройство, задающее цикловую подачу топлива, а иногда и характер процесса впрыска. В такие САР естественным образом встраиваются электрические регуляторы, например, электрический регулятор частоты вращения прямого действия (рис. 5.4).
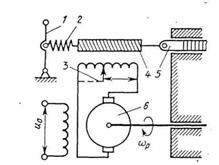
Рис.5.4 Схема электрического регулятора прямого действия: 1 - задатчик, 2 - пружина;
3 - ползунок; 4 - электромагнит; 5 - рейка; 6 - датчик частоты вращения
Составными элементами такого регулятора являются датчик 6 регулируемого параметра (например, тахогенератор постоянного тока) и исполнительное устройство в виде электромагнита 4. Возбуждение тахогенератора постоянного тока осуществляется либо постоянными магнитами, либо с помощью обмоток, получающих питание от источника постоянного тока. Входной координатой тахогенератора является изменение угловой скорости Δωр ротора, а выходной - изменение напряжений Δи на клеммах. В электрических машинах постоянного тока электродвижущая сила Еэ непосредственно связана с угловой скоростью ротора так, что Еэ = kEФωр где kE - постоянный коэффициент; Ф - поток возбуждения. При отсутствии нагрузки поток возбуждения остается постоянным, в связи, с чем электродвижущая сила практически пропорциональна угловой скорости, т. е.
Еэ = kωр (5.4)
где k = kEФuр; up - передаточное отношение механизма связи регулятора с коленчатым валом двигателя.
Для повышения точности работы тахогенератора необходимо обеспечить минимально возможную нагрузку на якорь. Тогда в соответствии с формулой (5.4) связь входной и выходной координат датчика можно принять линейной:
u = kωр (5.5)
Сигналы датчика 6 регулируемого параметра воспринимаются исполнительным устройством 4 через усилитель (например, трансформатор) или непосредственно.
В зависимости от напряжения и, поступающего на обмотки, электромагнит 4 вырабатывает силу Тэм притяжения, значение которой определяется соотношением:
Тэм = kмI 2 (5.6)
Так как I = u/Rм, (где Rм – постоянное сопротивление) то в соответствии с выражением (5.5) поддерживающая сила регулятора пропорциональна  , т.е.:
, т.е.:
 (5.7)
(5.7)
где Аэм – коэффициент поддерживающей силы, зависящий от электрических свойств обмотки, ее сопротивления, потока возбуждения и т.д.
Сердечник электромагнита 4 непосредственно связан с пружиной 2, усилие которой Fnp = Е представляет собой восстанавливающую силу регулятора. Поэтому условие статического равновесия сердечника имеет вид
Е - Аэм ω2 = 0 (5.8)
т.е. является аналогичным формуле (4.6) определения статического равновесия для механического регулятора.
Применение на двигателях электрических регуляторов дает возможность отказаться от традиционного для дизелей управляющего воздействия через рейку топливного насоса высокого давления и перевести это воздействие непосредственно на топливную форсунку. В таких системах функции дозирования и фазирования реализуются форсунками, а на топливный насос возлагается задача поддержания в аккумуляторе необходимого давления топлива (аккумуляторная система впрыска).
а) б)
Рис. 5.5. Электромагнитные форсунки с воздействием:
а - на иглу; б - на клапан; 1 - игла; 2 - пружина; 3 - электромагнит; 4 - клапан
Форсунка с электрическим управлением (рис. 5.5) преобразует электрический импульс, сформированный регулятором, в гидравлический импульс впрыска топлива в цилиндры. На рис. 5.5,а показана конструктивная схема форсунки, игла 1 которой прижимается к седлу пружиной 2. Подъем иглы и впрыск топлива осуществляются электромагнитом 3, к работе которого предъявляются весьма высокие требования. Так, срабатывание и отпускание магнита должно укладываться в пределы от 0,1 до 1 мс при ходе иглы от 0,2 до 0,5 мм и запирающем усилии около 50Н. Электромагниты - устройства инерционные и сила тока нарастает и спадает в них по экспоненте.
Электрические регуляторы частоты вращения с электронными блоками управления
Датчиком частоты вращения в регуляторе, принципиальная схема которого приведена на рис. 5.6, является тахогенератор с постоянным магнитом. В качестве исполнительного элемента использован электромагнит 3 пропорционального действия. Значения входных координат, которые поступают на электронный блок управления 5, в процессе работы синтезируются, в результате чего вырабатывается сигнал управления, воспринимаемый электромагнитом 3. Так, например, при сбросе нагрузки и увеличении угловой скорости ω ротора тахогенератор 1 подает сигнал в электронный блок 5, который воспринимает также сигналы потенциометра 4, характеризующие положение рейки 2 и, следовательно, цикловую подачу топлива.
Этот потенциометр выполняет функцию жесткой электрической обратной связи. Сигналы в электронном блоке синтезируются с сигналами:
а) V0 - задатчика скоростного режима (при всережимном регуляторе), обеспечивающего выбор регуляторной характеристики;
б) V1 — задатчика статизма (наклона) регуляторных характеристик;
в) V2 — задатчика коррекции цикловой подачи топлива по давлению наддува. На этот же блок могут поступать сигналы от датчиков давления и температуры окружающей среды, теплового состояния двигателя и др.
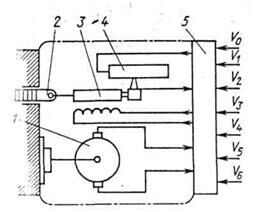
Рис. 5.6. Электрический регулятор с электронным блоком
| Вместе с этой лекцией читают "Растительные корма, представляющие опасность для животных".
|
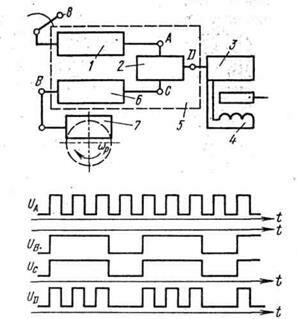
Рис. 5.7. Функциональная схема электронного регулятора частоты вращения:
1 - генератор постоянных импульсов; 2- сумматор; 3 - усилитель; 4 - исполнительный элемент (электромагнит); 5 - чувствительный элемент частоты вращения; 6 - ждущий мультивибратор; 7 - индуктивный датчик; 8 - задатчик
В качестве датчиков в регуляторах могут использоваться также различные электронные устройства. На рис. 5.7 показана функциональная схема одного из таких устройств, предназначенного для измерения частоты вращения. Устройство состоит из генератора 1, вырабатывающего положительные постоянные импульсы uА, поступающие на вход сумматора 2. На второй вход сумматора подаются выходные импульсы ждущего мультивибратора 6, сформированные в результате взаимодействия его с индуктивным датчиком 7 частоты вращения коленчатого вала. Датчик вырабатывает отрицательные импульсы ив, число которых определяется частотой вращения коленчатого вала. В самом мультивибраторе 6 формируются положительные импульсы ис, причем число импульсов ив индуктивного датчика 7 определяет ширину выходного положительного импульса ис. Чем больше импульсов ис датчика (чем больше частота вращения коленчатого вала), тем уже выходной импульс мультивибратора.
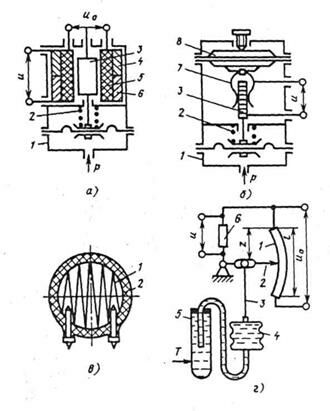
Рис. 5.8. Датчики: а - избыточного давления; б -абсолютного давления (1 – диафрагменная коробка; 2 - пружина; 3 - якорь (резистор); 4, 5, 6 - обмотки; 7 - ползунок; 8 - анероид); в - температуры воздуха во впускном коллекторе (1 - проволока; 2 - текстолитовый корпус); г - температуры охлаждающей воды (1 - потенциометр; 2 - ползунок; 3 - шток; 4 - сильфон; 5 - термобаллон; 6 - резистор)


















