
Регулирование скорости изменением числа пар полюсов
Регулирование скорости изменением числа пар полюсов
Регулирование скорости изменением числа пар полюсов р используется обычно, для .двигателей с короткозамкнутым ротором, так как при этом требуется изменять р только для обмотки статора. Изменять р можно двумя способами:
1) применением на статоре нескольких обмоток, которые уложены в общих пазах и имеют разные числа пар полюсов р;
2) применением обмотки специального типа, которая позволяет получить различные значения р путем изменения (переключения) схемы соединений обмотки.
Предложено значительное количество различных схем обмоток с переключением числа пар полюсов, однако широкое распространение из них получили только некоторые. Применение нескольких обмоток
невыгодно, так как при этом из-за ограниченного места с пазах сечение проводников каждой из обмоток нужно уменьшать, что приводит к снижению мощности двигателя. Использование обмоток с переключением числа пар полюсов вызывает усложнение коммутационной аппаратуры, в особенности, если с помощью одной обмотки желают получить более двух скоростей вращения. Несколько ухудшаются также энергетические показатели двигателей.
Двигатели с изменением числа пар полюсов называются многоскоростными. Обычно они выпускаются на 2, 3 или 4 скорости вращения, причем двухскоростные двигатели изготовляются с одной обмоткой на статоре и с переключением числа пар полюсов в отношении р2 : р1= 2 : 1, трехскоростные двигатели — с двумя обмотками на статоре, из которых одна выполняется с переключением р2 : р1= 2 : 1, четырехскоростные двигатели — с двумя обмотками на статоре, каждая из которых выполняется с переключением числа пар полюсов в отношении 2:1. Например, двигатель на f1 = 50 гц с синхронными скоростями вращения 1500/1000/750/500 об/мин имеет одну обмотку с переключением на 2р = 4 и 8 и другую обмотку с переключением на 2р = 6 и 12.
Многоскоростные двигатели применяются в металлорежущих и деревообрабатывающих станках, в грузовых и пассажирских лифтах, для приводов вентиляторов и насосов п в ряде других случаев.
Каждая фаза обмотки с переключением числа пар полюсов в отношении 2 : 1 состоит из двух частей, или половинок, с одинаковым количеством катушечных групп в каждой части.
Рекомендуемые материалы
Когда обе части обмотки обтекаются токами одинакового направления, обмотка создает магнитное поле с большим числом полюсов (рис.а, 2р = 4), а при изменении направления тока в одной части обмотки на обратное число полюсов уменьшается вдвое (рис. б и в, 2р = 2). Подобные переключения производятся во всех фазах одновременно, и переключаемые части обмотки могут соединяться последовательно (рис. а и б) или параллельно (рис. в).
Ширина фазной зоны, занимаемой сторонами катушек катушечной группы, и величина шага обмотки в зубцовых делениях одинаковы при обоих числах полюсов. Поскольку, однако, при переключении числа пар полюсов в отношении 2 : 1 полюсное деление изменяется в два раза, то величина фазной зоны в электрических градусах и относительный шаг обмотки при этом также изменяются в два раза.
Переключаемую обмотку выполняют так, что при меньшем числе пар полюсов (p1) фазная зона  = 60° эл. Тогда при удвоенном числе пар полюсов (
= 60° эл. Тогда при удвоенном числе пар полюсов ( ) ширина этой зоны = 120° эл
) ширина этой зоны = 120° эл
Нормальные одной фазы обмотки с переключением чередования фазных зон при одинаковом направлении вращения магнитного поля для обеих скоростей вращения должны быть такими, как показано на рис.2
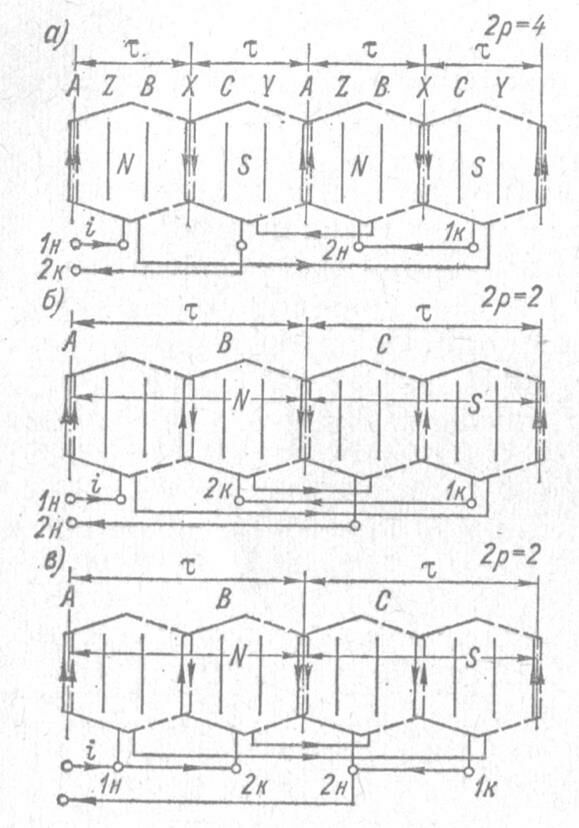
Рис 1.
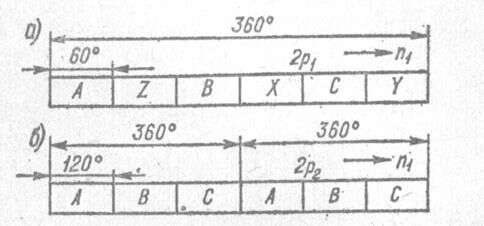
Рис 2.
Из рисунка видно, что, кроме изменения направлений токов в зонах X, Y, Z (рис. 2, а) на обратные (т. е. обращение их в зоны А, В, С), для сохранения направления вращения поля, а следовательно, и ротора при переключении числа пар полюсов (рис.2, б) необходимо также переключить концы двух фаз обмотки (например, фазы В и С).
Обмотка выполняется так, что ее шаг равен полному (180° эл.) при большем числе полюсов (2p2), так как кривая н. с. обмотки с зоной и =120° наиболее близка к синусоидальной при полном шаге. Тогда при меньшем числе полюсов относительный шаг 
Из сказанного следует, что обмотка с переключением числа полюсов создает н. с. с большей величиной высших гармоник поля, чем нормальная трехфазная обмотка с = 60° и  . Это приводит к некоторому ухудшению энергетических показателей двигателей с переключением числа полюсов по сравнению с нормальными.
. Это приводит к некоторому ухудшению энергетических показателей двигателей с переключением числа полюсов по сравнению с нормальными.
На рис. 3 представлена наиболее часто употребляемая схема обмоток с переключением числа пар полюсов в отношении р2 : p1 = 2 : 1.
Определим мощности и моменты, развиваемые двигателями с такими схемами обмоток при неизменном линейном напряжении сети Uл1 и наибольшем допустимом (номинальном) токе в полуфазе обмотки  Пренебрегая разницей в условиях охлаждения при изменении скорости вращения, можно принять, что величина одинакова при обеих скоростях вращения. Приближенно можно считать, что коэффициенты мощности и к. п. д. при одинаковых значениях для обеих скоростей вращения также одинаковы. При указанных условиях мощности на валу для схем рис. 3, а и б соответственно равны:
Пренебрегая разницей в условиях охлаждения при изменении скорости вращения, можно принять, что величина одинакова при обеих скоростях вращения. Приближенно можно считать, что коэффициенты мощности и к. п. д. при одинаковых значениях для обеих скоростей вращения также одинаковы. При указанных условиях мощности на валу для схем рис. 3, а и б соответственно равны:


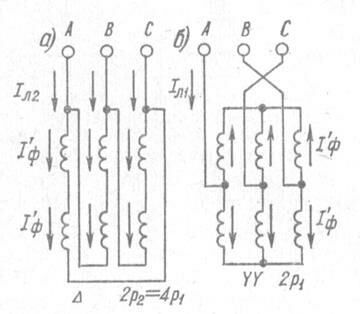
Рис. 3.
Вид механических характеристик двигателей со схемой обмоток рис. 3 изображен на рис.4
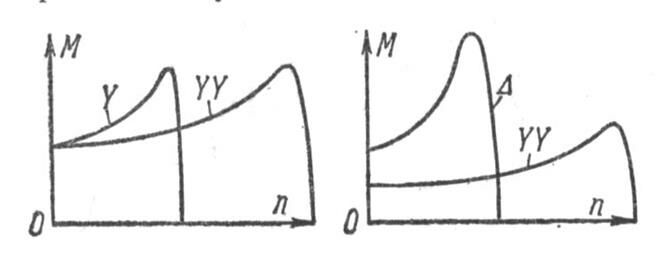
Рис 4.
При переключении много скоростной обмотки магнитные индукции на отдельных участках магнитной цепи в общем случае изменяются, что необходимо иметь в виду при проектировании двигателя, чтобы, с одной стороны, добиться по возможности более полного использования материалов двигателя, а с другой, не допустить чрезмерного насыщения магнитной цепи.
Вес и стоимость многоскоростных двигателей несколько больше, чем у нормальных асинхронных двигателей такой же мощности. Тем не менее это лучший и» наиболее широко применяемый способ регулирования скорости короткозамкнутых двигателей.
Регулирование скорости уменьшением величины первичного напряжения.
При уменьшении U1 момент двигателя изменяется пропорционально  и соответственно изменяются механические характеристики (рис. 1),
и соответственно изменяются механические характеристики (рис. 1),
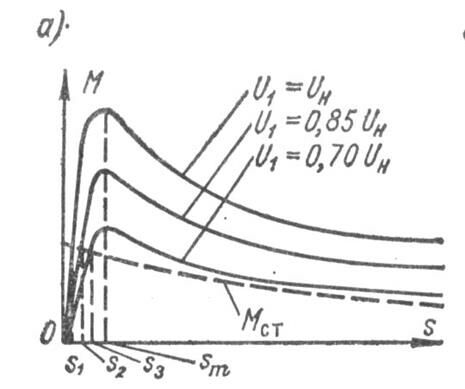
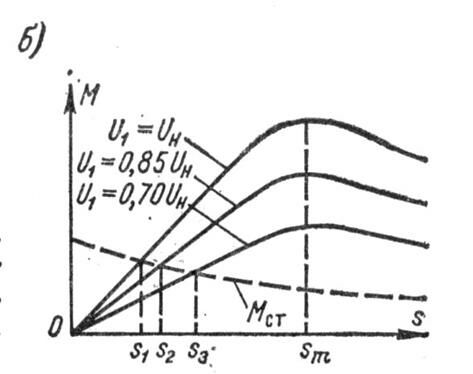
Рис 1.
в результате чего изменяются также значения рабочих скольжении s1,s2,s3... при данном виде зависимости  - Очевидно, что регулирование s в этом случае возможно в пределах 0 < s < sm. Для получения достаточно большого диапазона регулирования скорости необходимо, чтобы активное сопротивление цепи ротора и соответственно sм, были достаточно велики (рис. 1, б).
- Очевидно, что регулирование s в этом случае возможно в пределах 0 < s < sm. Для получения достаточно большого диапазона регулирования скорости необходимо, чтобы активное сопротивление цепи ротора и соответственно sм, были достаточно велики (рис. 1, б).
Вместе с этой лекцией читают "20 Профилактика гипотермии".
Следует учитывать, что во вторичной цепи возникают потери, равные мощности скольжения P2 и вызывающие повышенный нагрев ротора.
Этот метод регулирования скорости применяется также для двигателей с фазным ротором, причем в этом случае в цепь ротора включаются добавочные сопротивления.
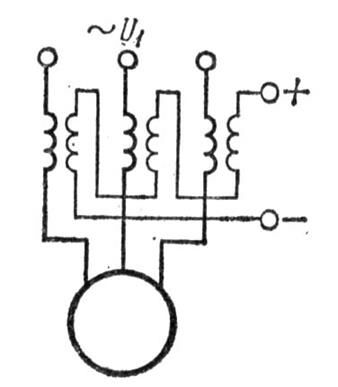
 Рис. 2.
Рис. 2.
В связи с пониженным к. п. д. и трудностями регулирования напряжения рассматриваемый метод применяется только для двигателей малой мощности. При этом для регулирования U1 можно использовать регулируемые автотрансформаторы или сопротивления, включенные последовательно в первичную цепь. В последние годы для этой цели все чаще применяют (рис. 2) реакторы насыщения, регулируемые путем подмагничивания постоянным током.
При изменении величины постоянного тока подмагничивания индуктивное сопротивление реактора изменяется, что приводит к изменению напряжения на зажимах двигателя. Путем автоматического регулирования тока подмагничивания можно расширить зону регулирования скорости в область s > sm и получить при этом жесткие механические характеристики.



















