Системы с изменяющимися состояниями
Лекция 15
4.16 Системы с изменяющимися состояниями
Предположим, что снова задана система данных с полностью упорядоченным параметрическим множеством. Как было показано, система данных может быть описана параметрически инвариантно через множество подходящих систем с поведением, согласующихся с системой данных и удовлетворяющих выдвинутым требованиям. Несмотря на то, что системы с поведением совершенно адекватно описывают полное ограничение на исследуемые выборочные переменные, существует и другая форма представления этого ограничения, часто представляющаяся конечному исследователю более подходящей. Эта форма обычно называется отношением изменения состояния или сокращенно ST-отношением. Это отношение определяется не на отдельных состояниях, а на последовательных парах состояний; порождающие системы, в которых используется эта формула представления состояний, называются системами с изменяющимися состояниями или ST-системами.
 Для ST-систем маски выборочные переменные, множества состояний выборочных переменных и их декартово произведение С определяются точно так же, как и для систем с поведением, за исключением двух отличий
Для ST-систем маски выборочные переменные, множества состояний выборочных переменных и их декартово произведение С определяются точно так же, как и для систем с поведением, за исключением двух отличий
(1) к ST-системам неприменимо разделение выборочных переменных на порождаемые и порождающие, и
(2) содержательные маски в ST-системах имеют дополнительные ограничения. Аналогами функций поведения в ST-системах являются функции изменения состояния (или ST-функции). Для нейтральных систем они определены на  , а не на С, а для направленных систем на
, а не на С, а для направленных систем на  , а не на
, а не на  .
.
Для нейтральных систем аналогами функций поведения определяем формулами (4.11), (4.20), (4.17), являются следующие ST-функции:
 (4.63)
(4.63)
Рекомендуемые материалы
где  —это вероятность состояния
—это вероятность состояния  , следующего непосредственно за состоянием с (согласно выбранному порядку порождения);
, следующего непосредственно за состоянием с (согласно выбранному порядку порождения);
 , (4.64)
, (4.64)
где  —условная вероятность того, что при текущем состоянии с следующим состоянием будет состояние
—условная вероятность того, что при текущем состоянии с следующим состоянием будет состояние  ; будем поэтому использовать общепринятую запись
; будем поэтому использовать общепринятую запись  :
:
 (4.65)
(4.65)
где , т. е. следующее состояние однозначно определяется текущимсостоянием с; функция специального вида (4.65) применима, разумеется, только к детерминированным системам. Будем
, т. е. следующее состояние однозначно определяется текущимсостоянием с; функция специального вида (4.65) применима, разумеется, только к детерминированным системам. Будем  называть порождающими ST-функциями.
называть порождающими ST-функциями.
Аналогами нейтральных систем с поведением являются соответственно ST-система
 , (4.66)
, (4.66)
и порождающая ST-система
 (4.67)
(4.67)
где I, M и имеют тот же смысл, что в системах с поведением.
имеют тот же смысл, что в системах с поведением.
Для заданных системы данных и маски ST-функция fST хорошо согласующаяся с системой данных и маской, может быть определена с помощью полной выборки данных аналогично тому, как это делалось для функции поведения fB. Единственное отличие состоит в том, что в результате выборки получаются частоты  пар последовательных состояний, а не частоты N(c) отдельных состояний.
пар последовательных состояний, а не частоты N(c) отдельных состояний.
Пара  называется переходом из состояния с в другое состояние
называется переходом из состояния с в другое состояние согласно объявленному на параметрическом множестве порядку порождения. Одним из важнейших свойств ST-функций является то, что переходы в некоторое состояние должны находиться в равновесии с переходами из этого состояния. Если используются вероятности, то для любого состояния
согласно объявленному на параметрическом множестве порядку порождения. Одним из важнейших свойств ST-функций является то, что переходы в некоторое состояние должны находиться в равновесии с переходами из этого состояния. Если используются вероятности, то для любого состояния  имеем
имеем
 (4.68)
(4.68)
и, следовательно,
 (4.69)
(4.69)
что и определяет равновесие переходов.
Состояния с, с' могут рассматриваться как состояния, определяемые двумя взаимосвязанными масками М, М'. Маски связаны между собой простым сдвигом в соответствии со следующими правилами сдвига:
 тогда и только тогда, когда
тогда и только тогда, когда , (4.70)
, (4.70)
если данные порождаются в порядке возрастания параметра, или
 тогда и только тогда, когда
тогда и только тогда, когда , (4.71)
, (4.71)
если данные порождаются в обратном порядке.
Маски  используются вместе для описания пар состояний
используются вместе для описания пар состояний .
.
Чтобы избежать противоречий и неполноты при порождении данных, содержательные маски в ST-системах должны удовлетворять следующему требованию (в дополнение к требованиям для масок в системах с поведением):
для заданной маски М, если  и
и  и
и , то
, то  для всех целых
для всех целых , таких, что
, таких, что
Это значит, что маски в ST-системах не должны содержать «пробелы», подобные элементам  на рис. 4.1. Маски, удовлетворяющие этому дополнительному требованию, будем называть компактными масками.
на рис. 4.1. Маски, удовлетворяющие этому дополнительному требованию, будем называть компактными масками.
Для обоснования этого требования предположим, что маска М ST-системы некомпактна. Тогда существует по крайней мере одна пара элементов из маски М, скажем пара  ,
, , такая, что
, такая, что ,
,
 (4.72)
(4.72)
и для всех
для всех . Из (4.70) имеем
. Из (4.70) имеем
 (4.73)
(4.73)
Обозначим выборочные переменные, базирующиеся на этих элементах  , через
, через  и
и  . Состояния
. Состояния  ,
, являются компонентами
являются компонентами  . Тем самым они должны быть или определены для каждого значения параметра по состоянию с, или порождаться в соответствии с распределением вероятностей или возможностей
. Тем самым они должны быть или определены для каждого значения параметра по состоянию с, или порождаться в соответствии с распределением вероятностей или возможностей  для каждого конкретного с. Однако ни один из этих вариантов для
для каждого конкретного с. Однако ни один из этих вариантов для  невозможен. Из-за (4.72) оно не может быть определено по состоянию с, не может быть и корректно порождено при любом значении параметра t, так как
невозможен. Из-за (4.72) оно не может быть определено по состоянию с, не может быть и корректно порождено при любом значении параметра t, так как
 >,(4.74)
>,(4.74)
и, таким образом,  определяется состоянием s2 при значении параметра
определяется состоянием s2 при значении параметра  . Нет никакой гарантии, что порожденное состояние
. Нет никакой гарантии, что порожденное состояние  будет соответствовать этому ранее определенному состоянию. С другой стороны, если состояние
будет соответствовать этому ранее определенному состоянию. С другой стороны, если состояние  порождается, то
порождается, то  становится неполным, так как ранее определенное состояние
становится неполным, так как ранее определенное состояние
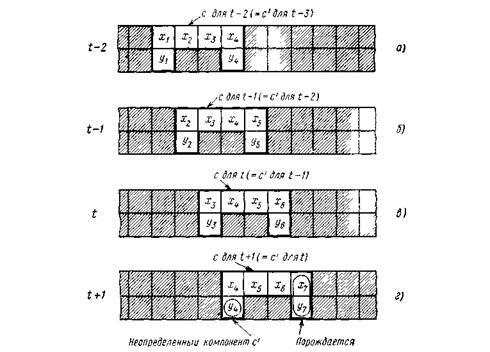
Рис. 4.10. Пример несогласованности или неполноты ST-систем с некомпактными масками
неизвестно (т. е. оно не является компонентом с). Следовательно, при любом значении t состояние  не может быть ни определено из с, ни порождено с помощью порождающей ST-функции.
не может быть ни определено из с, ни порождено с помощью порождающей ST-функции.
Иллюстрацией к доказательству того, что маски с «пробелами» недопустимы в ST-системах, служит рис. 4.10; компонент следующего состояния с' при значении параметра t+1 не может быть ни определен из состояния с в момент времени t (рис. 4.10,в), ни порожден с помощью ST-функции, так как уже порожден при значении параметра t—3 (рис. 4.10,а).
Удобно представлять ST-функции (4.63) и (4.64) в виде квадратных матриц, строки и столбцы которых связаны соответственно с с и . Элементами этих матриц являются значения соответственно
. Элементами этих матриц являются значения соответственно  или
или 
Пример 4.5. Одним из подходов к оценке производительности вычислительной техники является постоянный контроль за аппаратным обеспечением. Значение этого подхода будет возрастать по мере возрастания сложности оцениваемых вычислительных систем. При контроле аппаратного обеспечения наблюдаются определенные ключевые переменные, обычно описывающие состояние отдельных компонентов вычислительной системы. Делается это в течение определенного времени обслуживания системы пользователями с помощью так называемых аппаратных мониторов. Данные обрабатываются аппаратным монитором и анализируются с целью обнаружения узких мест в системе и поиска способов повышения производительности, которая также должна быть каким-либо образом определена.
Обычно в состав аппаратных мониторов входят счетчики, которые в процессе сбора данных или считают число происшедших событий (режим счета), или измеряют длительность событий (временной режим). Это значит, что обычно аппаратный монитор предоставляет исследователю не фактические данные, а обобщенные. Например, монитор определяет, что центральный процессор (ЦП) вычислительной системы был загружен в течение 43% времени наблюдения, что канал был занят в 15% всех наблюдений, но не дает фактической последовательности событий, которые бы можно было затем обрабатывать и анализировать.
При этом часто теряется важная информация, способствующая лучшему пониманию вопросов, связанных с производительностью компьютера. Например, совершенно выпадают из анализа динамические аспекты работы компьютера.
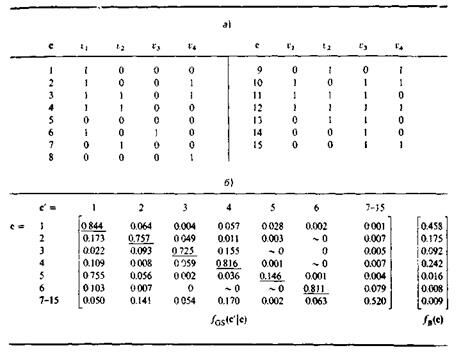
Согласно концепции АСНИ все наблюдения должны быть зафиксированы, а затем обработаны любым подходящим способом. В данном примере по времени было сделано 409610 наблюдений для четырех переменных v1, v2, v3, v4. Каждая переменная имела два состояния 0 и 1, характеризующие состояние конкретного компонента аппаратного обеспечения: 0 означает, что компонент был неактивен во время наблюдения, а 1 — что активен. Переменная  описывает работу ЦП, а остальные три переменных — работу трех важных каналов связи системы. Для получения вероятностной ST-функции из этого огромного набора данных, превышающего 1,6 млн. бит, с помощью маски без памяти была сделана выборка для двух последовательных состояний. Это дало 15 состояний (см. табл. 4.2,а) и 11З переходов. Состояния 7—15 появляются очень редко: вероятность того, что система находится в одном из этих состояний 0.009. Если для упрощения ST-функции, объединить эти состояния в одно, что удобно для исследователя, получится матричное представление порождающей ST-функции, приведенное в табл. 4.2,б. Элементами матрицы являются условные вероятности
описывает работу ЦП, а остальные три переменных — работу трех важных каналов связи системы. Для получения вероятностной ST-функции из этого огромного набора данных, превышающего 1,6 млн. бит, с помощью маски без памяти была сделана выборка для двух последовательных состояний. Это дало 15 состояний (см. табл. 4.2,а) и 11З переходов. Состояния 7—15 появляются очень редко: вероятность того, что система находится в одном из этих состояний 0.009. Если для упрощения ST-функции, объединить эти состояния в одно, что удобно для исследователя, получится матричное представление порождающей ST-функции, приведенное в табл. 4.2,б. Элементами матрицы являются условные вероятности  . Обозначение ~0 используется для вероятностей, которыми можно пренебречь; через 0 обозначены переходы, которые вообще не наблюдались. В матрице подчеркнуты элементы, соответствующие переходу из состояния снова в это состояние. В табл. 4.2,б также приведен вектор-столбец значений
. Обозначение ~0 используется для вероятностей, которыми можно пренебречь; через 0 обозначены переходы, которые вообще не наблюдались. В матрице подчеркнуты элементы, соответствующие переходу из состояния снова в это состояние. В табл. 4.2,б также приведен вектор-столбец значений функции поведения
функции поведения  при той же маске (маска без памяти),
при той же маске (маска без памяти),
Таблица 4.2 ST-функция для исследования по оценке производительности вычислительной системы
Информация в лекции "2.8. Процессы в информационных системах - ИС" поможет Вам.
которая обычно и является результатом контроля работы аппаратного обеспечения. Понятно, что
 ,(4.75)
,(4.75)
В некоторых случаях предпочтительнее представлять ST-функции в виде диаграмм. Такая диаграмма представляет собой набор узлов, по одному для каждого состояния наблюденных выборочных переменных, и ориентированных связей между узлами, соответствующих реально существующим переходам. Узлы на диаграмме должны быть помечены соответствующими идентификаторами состояния с, а связи помечены значениями  или
или  ; в последнем случае желательно также пометить узлы значениями
; в последнем случае желательно также пометить узлы значениями  так, чтобы значения
так, чтобы значения  можно было вычислить при необходимости из уравнения (4.75).
можно было вычислить при необходимости из уравнения (4.75).
К.Р. № 15
Опишите ST-функцию для системы с изменяющимися состояниями.