
Проектирование нечетких регуляторов
Лекция № 15. 4.3. Проектирование нечетких регуляторов на основе искусственных нейронных сетей
Как уже отмечалось, главное преимущество нечетких регуляторов возможность управления сложными объектами с плохо изученной динамикой на основе методов, базирующихся на знаниях. Идея нечеткого управления при этом сводится к моделированию поведения человека–эксперта, способного управлять объектом, не зная его математической модели. Эксперт формулирует свои действия по управлению в виде некоторых лингвистических правил, представляемых затем с помощью аппарата нечеткой логики. Однако сам переход от лингвистических правил к их количественному представлению является недостаточно формализованным и зависит, в частности, от произвольного выбора формы функций принадлежности. Поскольку качество нечеткого регулятора существенно зависит от изменения формы функций принадлежности, то необходима оптимизация (подстройка) параметров этих функций.
Новые возможности для решения этой проблемы открываются в связи с применением искусственных нейронных сетей (artificial neural networks). Объединение нечетких и нейронных сетей позволяет создать качественно новый класс регуляторов, называемых нейро-нечеткими (neuro-fuzzy) или нечетко-нейронными (fuzzy-neuro) и играющих все более заметную роль в интеллектуальном управлении [5]. Эти регуляторы сочетают указанные выше достоинства нечетких алгоритмов с положительными качествами нейронных сетей (универсальность, высокое быстродействие, способность к обучению, устойчивость к отказам). Некоторые из дополнительных функций, реализуемых в ИСУ с помощью нейронных сетей, уже рассматривались в 4.1.3.
Поскольку вопросы проектирования нейронных сетей (НС) представляют собой самостоятельный интерес, ограничимся лишь самыми первыми (элементарными) сведениями, дающими представление о данном классе моделей (более подробную информацию по НС можно найти, например, в [27-30]. Первоначально НС предполагалось использовать для моделирования деятельности человеческого мозга. Сегодня они получили широкое применение в технике - для решения задач распознавания образов, прогнозирования, оптимизации, обработки сигналов при наличии больших шумов, управления в реальном времени.
Существует несколько типов НС, которые могут использоваться в системах управления. На рис. 4.16 приведена распространенная структурная схема НС, предложенная еще в 1958 г. нейробиологом из Корнеллского университета (США) Ф. Розенблаттом и получившая название многослойного персептрона (multilayer perceptron). (Кстати, и здесь не обошлось без пессимистов: известный математик и кибернетик Марвин Мински из Массачусетского технологического института в 1969 г. написал книгу1, где раскритиковал персептроны как вещи, "вплотную примыкающие к бесполезным").
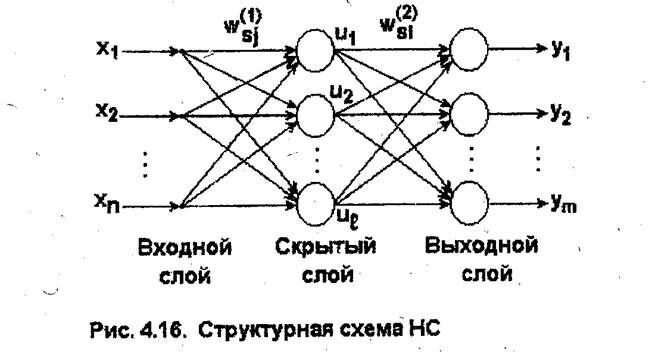
На структурной схеме выделены три слоя, два из которых включают в себя большое число нейронов (neurons), представляющих собой однотипные, простейшие, взаимодействующие друг с другом узлы обработки информации. Второй слой НС, называемый скрытым (или промежуточным) слоем, связан с входными сигналами xi, X2,..., Xn -элементами входного слоя - посредством связей (синапсов) с определенными весовыми коэффициентами 
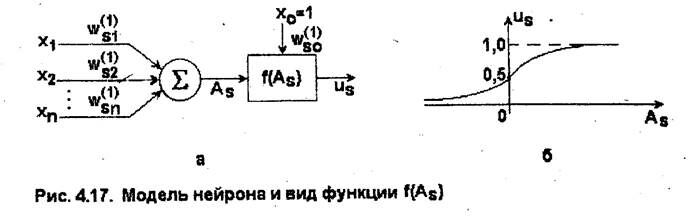
Модель нейрона скрытого слоя имеет следующий вид (рис. 4,17, а).
Рекомендуемые материалы
Сигнал Us здесь вычисляется с помощью формулы
где Xj (j=l,2,..., n) - входы НС; xq=i - константа (постоянный вход);
 - настраиваемые коэффициенты (веса);
- настраиваемые коэффициенты (веса);
Ag - взвешенная сумма входных величин НС; f(Ag) - нелинейная функция, выбираемая в значительной степени произвольно. На рис. 4.17, б приведена так называемая функция активации нейрона - "сигмоидная" функция f(Ag), обладающая следующими свойствами: f(Ag) - неотрицательная, монотонно возрастающая функция, принимающая асимптотически значения 1 при Ag-^oo и 0 при As-»-°o; f(0)=0,5. Пример аналитического выражения для функции f(A„):

Аналогичной структурой обладают нейроны, расположенные в выходном слое НС. Поведение этих нейронов описывается уравнением

где Uo=l - константа; - весовые коэффициенты (веса соответствующих связей - синапсов); I и m - соответственно число нейронов в скрытом и выходном слое. Общее число искусственных нейронов в современных технических НС достигает 104 (человеческий мозг содержит около 1011 нейронов и более чем 1015 связей между ними). Основное свойство НС - возможность изменять свои характеристики в желаемом направлении (за счет изменения весовьх . коэффициентов ,  ) в процессе обучения. Сам процесс обучение протекает следующим образом. На входы НС подаются обучающие данные
) в процессе обучения. Сам процесс обучение протекает следующим образом. На входы НС подаются обучающие данные  , для которых известны желаемые (эталонные) реакции НС -
, для которых известны желаемые (эталонные) реакции НС -  Далее определяются фактические выходные реакции сети
Далее определяются фактические выходные реакции сети  на эти данные и вектор ошибки
на эти данные и вектор ошибки  , компоненты которого представляют собой разности между фактическими и желаемыми значениями выходов НС:
, компоненты которого представляют собой разности между фактическими и желаемыми значениями выходов НС:

Составляется функция, равная сумме квадратов указанных ошибок, и процесс повторяется. В результате для каждого рассматриваемого (k-го) набора из (m+n) обучающих данных  значение суммарной квадратичной ошибки
значение суммарной квадратичной ошибки

Цель настройки весовых коэффициентов – уменьшение суммарной ошибки Е, для чего обычно используется градиентный метод оптимизации. Согласно этому методу, значения конкретного весового коэффициента W на (k+1)-м и k-м цикле оптимизации связаны между собой следующим соотношением:

где параметр а влияет на скорость сходимости процесса (обычно рекомендуется  . Используя алгоритм (4,8) для адаптации коэффициентов на достаточно большом числе обучающих данных, можно добиться малых значений суммарной квадратичной ошибки Е, т.е. хорошего совпадения фактических и эталонных реакций НС.
. Используя алгоритм (4,8) для адаптации коэффициентов на достаточно большом числе обучающих данных, можно добиться малых значений суммарной квадратичной ошибки Е, т.е. хорошего совпадения фактических и эталонных реакций НС.
"Часть 16" - тут тоже много полезного для Вас.
Существуют различные варианты алгоритмов адаптации весовых коэффициентов НС, из которых наиболее распространенным является метод обратного распространения (Back Propagation) [5, 27-30]. Для реализации изложенных алгоритмов можно использовать, например, параллельные вычисления на транспьютерах, что позволяет выявить достоинства НС в полном объеме. Основные проблемы построения НС, решаемые зачастую эмпирически, - выбор числа слоев и количества нейронов в каждом слое, выбор наиболее эффективного набора обучающих данных, последовательности их предъявления НС и алгоритма адаптации (обучения).
Параллельная структура НС может быть использована в нечетких системах управления (которые по своей природе также могут быть рассмотрены как параллельные) при представлении нечетких подмножеств, заданных их функциями принадлежности, в качестве входных нейронов. На рис. 4.18 показана схема нечеткого регулятора с обучением, полученного на основе метода нечетких ассоциативных отображений (Fuzzy Assosiated Maps - FAM) и работающего аналогично обучаемой НС [16]. .
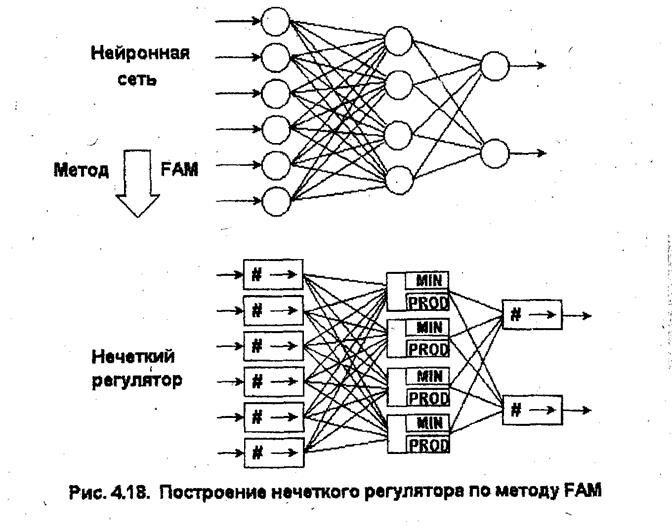
Символом "#" здесь обозначены "четкие" значения переменных, символ "-^"обозначает соответствующие им нечеткие подмножества (термы). Для выполнения правил вывода используется метод Минимума-Произведения (MIN-PROD). Предполагается, что на эта? ;е обучения происходит настройка весовых коэффициентов связей, соединяющих выходы блока фаззифиации со входами механизма вывода, а также выходы механизма вывода со входами блока дефаззификации. Для этого используются обучающие данные и алгоритмы обучения, аналогичные обучению НС. После завершения процесса обучения (это может занимать достаточно большое число циклов) регулятор готов к работе.
В [5] описано применение методов нейро-нечеткого управления для проектирования интеллектуальной системы управления полетом и силовой установкой гиперзвукового самолета нового поколения типа Х-29. Решение этой задачи классическими методами практически невозможно, поскольку разработка точных математических моделей потребует годы теоретических исследований, анализа результатов продувок, стендовых и летных испытаний и т.д. Дополнительные сложности связаны с увеличением числа степеней свободы (управление вектором тяги и др.), появлением нерасчетных режимов полета (например, скоростей с числом Маха>10), ограничениями на управление аэродинамическими поверхностями на неустойчивых режимах и т.п. Использование НС позволяет в данном случае производить идентификацию характеристик системы в реальном времени (с учетом нелинейной динамики самолета) даже при таких изменениях динамики, которые возникают при отказах или повреждениях самолета. Нечеткие регуляторы обеспечивают адаптивное, нелинейное управление самолетом и его силовой установкой в широком диапазоне изменения условий полета, в том числе обеспечение безопасности полета при возникновении критических (аварийных) ситуаций.
В заключение процитируем еще раз слова основоположника и пропагандиста теории нечетких множеств проф. Л.А.Заде [9]: "В последующие годы нечеткие алгоритмы и стратегии управления будут завоевывать, хотя, возможно, и против желания, все большее признание. Они должны быть приняты и должны приобрести некоторую респектабельность, так как обычные "четкие" алгоритмы не могут в общем случае справиться со сложностью и плохой определенностью больших систем. Для того чтобы создать благоприятную среду для развития нечетких алгоритмов, теория управления должна меньше значения придавать математической строгости и точности и больше заботиться о развитии качественных и приближенных решений насущных проблем реального мира. Такая теория может оказаться гораздо богаче и увлекательнее, чем теория управления в настоящее время".




















