
Лекция 2 - Пневматические захватные устройства
Лекция №2
Пневматические захватные устройства промышленных роботов.
Пневматические захватывающие устройства имеют следующие достоинства:
· Экономичность
· Простота реализации
· Дешевизна
Недостатки:
· Невысокая грузоподъемность
· Возможен шум при работе
Рекомендуемые материалы
Гидравлические захватывающие устройства имеют следующие достоинства:
· Высокая тяговая способность и компактность
Недостатки:
· Экологическая угроза
· Дороговизна
Электромеханические устройства применяются только в исключительных случаях.
По типу передаточного механизма механические захватывающие устройства делятся:
1. Рычажные
2. Клиновые и кулачковые
3. Реечные:
· Качающиеся
· Плоскопараллельные
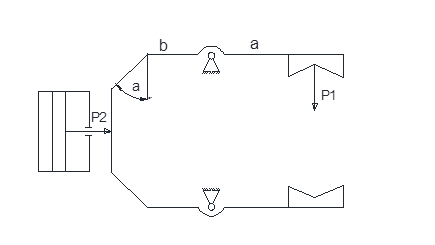
Понятие силового передаточного отношения.
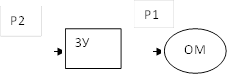 |
P2 – усилие привода
P2=F*P
F – Активная площадь
P - Давление
ОМ – объект манипулирования
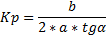
P1 – усилие, необходимое для надежного удержания заготовки, в процессе манипулирования. Cиловое передаточное отношение механизма:

Методика определения усилия P1:
Усилие  , и зависит от большого числа факторов:
, и зависит от большого числа факторов:
1. Ориентация заготовки в пространстве
2. Масса заготовки
3. Коэффициент трения между губками захватывающих устройств и заготовкой
4. Геометрия губок
5. Динамические характеристики робота (линейные и угловые скорости и ускорения)
Методы позволяющие рассмотреть усилия P1 можно разделить на полуэмпирические и теоретические.
Эмпирическая методика.

G – Вес заготовки
К1 – коэффициент запаса
К1=2-2,5
К2 – коэффициент динамики

 - максимальное линейное ускорение
- максимальное линейное ускорение
 – коэффициент ориентации и закрепления
– коэффициент ориентации и закрепления

Θ=45⁰,60⁰,90⁰
 - коэффициент трения между губками и заготовкой
- коэффициент трения между губками и заготовкой
Для гладких губок сталь о сталь =0,1-0,12
Для рифленых губок сталь о сталь =0,4-0,45
Эмпирический методика отличается простой, но меньшей достоверностью в силу учета малого количества факторов.
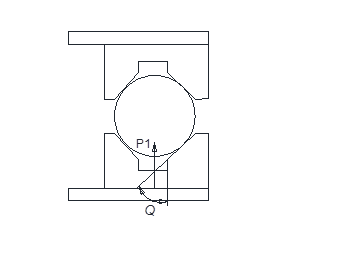
Теоретическая методика базируется на понятии трех основных движений, а именно:
· Вертикальный подъем, вертикальная ориентация заготовки
· Горизонтальное перемещение, вертикальная ориентация заготовки
· Вращение руки, вертикальная ориентация заготовки
Горизонтальное перемещение, вертикальная ориентация заготовки
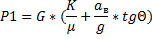
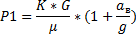
К – коэффициент запаса
 – ускорение вертикального перемещения.
– ускорение вертикального перемещения.
Вертикальный подъем, вертикальная ориентация заготовки
Вращение руки, вертикальная ориентация заготовки

 – угловая скорость
– угловая скорость
 - стартовое ускорение или замедление
- стартовое ускорение или замедление
R – радиус вращения
Для практических расчетов предполагается, что все три движения реализуются одновременно и тогда усилие P1 является суммой всех трех слагаемых. Уравнение примет вид:

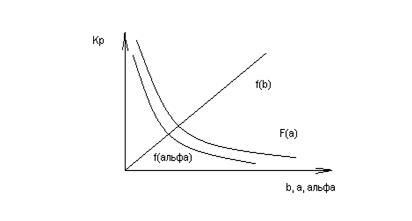
Cиловое передаточное отношение зависит от типа передаточного механизма
Механическое захватывающее устройство с рычажным передаточным механизмом.
На базе теоретической механики получаем
Люди также интересуются этой лекцией: 4. Математическое описание основных структур.
Рекомендуется, 
 - средний диаметр захватываемых заготовок
- средний диаметр захватываемых заготовок
 - в зажатом состоянии
- в зажатом состоянии
b – является искомой


















