
Основные понятия теории моделирования
Основные понятия теории моделирования.
Пусть задана сложная дискретная система S.
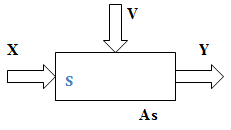
Модель объекта моделирования можно представить в виде множества величин, определяющих процесс функционирования реальной системы S и образующие в общем случае следующие подмножества:
|
|
| Множество входных параметров |
|
|
| Рекомендуемые материалы-50% Задача 5.1 + Задача 5.2 ДЗ-1 Булевы функции СМ5,7,11 Шишкина Вариант 5 - ДЗ №1 - 1 и 2 задача -50% Задача 5.2 -50% Задача 5.2 -50% Задача 5.3 Множество внутренних параметров |
|
|
| Внешнее воздействие |
|
|
| Множество выходных параметров |
В общем случае эти переменные ( ,
, ,
, ) являются элементами непересекающихся подмножеств и содержат как детерминированные, так и стохастические составляющие.
) являются элементами непересекающихся подмножеств и содержат как детерминированные, так и стохастические составляющие.
При моделировании функционирования сложной системы S, входные воздействия Х, воздействия внешней среды М и внутренние параметры системы являются независимыми (экзогенными) характеристиками (или переменными), которые в векторной форме имеют следующий вид:



А выходные характеристики системы являются зависимыми (эндогенными) переменными и в векторной форме имеют следующий вид:

Процесс функционирования системы S описывается по времени некоторым оператором Fs, который в общем случае преобразует независимые переменные в соответствии со следующим соотношением:
 (1)
(1)
Эта зависимость (1) называется законом функционирования сложной системы S. В общем случае он может быть задан в виде функции, функционала, логических условий, в алгоритмическом или табличном виде и т.д. Весьма важным является понятие алгоритма функционирования системы, под которым подразумевается метод получения выходных характеристик y(t) с учетом входных воздействий x(t), воздействий внешней среды v(t) и соответствующих внутренних параметров системы h(t). Очевидно, что один и тот же закон функционирования Fs может быть реализован различными способами, т.е. с помощью множества различных алгоритмов функционирования. Соотношение (1) может быть получено и через свойства системы в конкретные моменты времени, называемыми состояниями, которые характеризуют вектор состояний:
Ещё посмотрите лекцию "5. Влажность воздуха. Облака. Осадки. " по этой теме.

Если рассматривать процесс функционирования системы как последовательную смену состояний  , то они могут быть интерпретированы как координаты точки в k-мерном пространстве (фазовом пространстве), причем каждой реализации процесса будет соответствовать некоторая траектория – совокупность всех возможных состояний
, то они могут быть интерпретированы как координаты точки в k-мерном пространстве (фазовом пространстве), причем каждой реализации процесса будет соответствовать некоторая траектория – совокупность всех возможных состояний  . Совокупность всех возможных состояний называется пространством состояния объекта.
. Совокупность всех возможных состояний называется пространством состояния объекта.
Состоянием системы в момент времени t0 ≤ t ≤ T* полностью определяется начальными условиями  , где Z0 – состояние системы в момент времени t0, входными воздействиями, внутренними параметрами и воздействиями внешней среды, которые имели место за промежуток времени (t – t0). Определим их с помощью двух векторных уравнений:
, где Z0 – состояние системы в момент времени t0, входными воздействиями, внутренними параметрами и воздействиями внешней среды, которые имели место за промежуток времени (t – t0). Определим их с помощью двух векторных уравнений:
В общем случае время в модели может быть непрерывным в интервале t0 ≤ t ≤ T*, а может быть и дискретным, т.е. квантованным на отрезке ∆t: T* = m∆t, где m - число интервалов дискретизации.




















