
Средства механизации спуско-подъемных операций
Лекция №8
«Оборудование для добычи НиГ»
Средства механизации спуско-подъемных операций
- Технология механизации СПО
Механизацию следует рассматривать как главный фактор, ликвидирующий ручной и увеличивающий производительность. Средства механизации СПО могут предназначаться для отдельных операций, группы операций или всех операций. В первом и втором случаях, механизацию принято называть частичной, в последнем случае – комплексной. При синхронном и автоматическом управлении комплексно-механизированными СПО, они считаются автоматизированными. Технология механизации должна обеспечивать заданную степень облегчения труда, повышения его безопасности, улучшения условий его выполнения и ускорения выполнения процесса или операций. Принципиальные схемы, конструкции, качество, надежность средств механизации должны обеспечить получение эффекта от запроектированной технологии. Условия их применения отличаются высокой частотой транспортировки в условиях бездорожья, работе по монтажу в любое время года и при любой погоде, использование в агрессивных и загазованных средах, загрязненных парафинами и смолами, вне помещений и укрытий. Отсюда требования к средствам механизации СПО:
· высокая транспортабельность;
· минимальная масса;
· надежность и работоспособность в фактических условиях работ.
Первые попытки механизации относятся к операциям с свинчивания – развинчивания НКТ. Для этого был разработан ряд механических ключей. Частичная механизация осуществляется с помощью четырех главных видов средств механизации: механических трубных и штанговых ключей, механических спайдеров и комбинированных устройств на базе агрегатированных механических ключей со спайдерами. В настоящее время комплексно-механизированным способом СПО выполняются только при использовании буровых установок (система АСП) для подземного ремонта, оборудование для такой технологии находится в стадии разработки.
- Механические трубные и штанговые ключи
Рекомендуемые материалы
Механические трубные ключи предназначены для механизации операций по свинчиванию и развинчиванию резьбовых соединений труб при их спуске-подъеме в скважинах. Механические ключи конструктивно выполняются специализированными для работ с обсадными, бурильными или насосно-компрессорными трубами. Механические ключи работают в условиях аналогичных условиям работы ручных ключей, элеваторов и спайдеров, поэтому к ним предъявляются такие же требования.
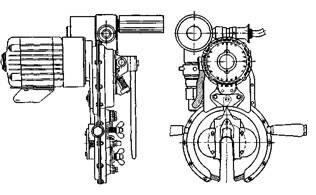
Конструкция механического штангового ключа системы Нагаева с автоматизацией работы штангозахватного органа
Автоматизированный штанговый ключ
Схемы механических трубных ключей построены на сочетании функционально одинаковых блоков: источника энергии, двигателя, преобразователя, вращателя, стопора и трубозахватных органов. В настоящее время наибольшее применение получили трубные ключи трех типов:
- подвижные с открытым или закрытым зевом – надвигаемые на трубу для ее захвата и вращения;
- подвижные кольцевой неразъемной формы – перемещаемые до и после свинчивания или отвинчивания по оси трубы;
- неподвижные кольцевой неразъемной формы, остающиеся во время СПО неподвижными.
Подвижный ключ с открытым зевом состоит из корпуса с зевом, в котором расположен вращатель, оснащенный трубозахватными органами. При вращении трубозахватные органы автоматически захватывают трубу и предают ей вращающий момент. Схема трубозахватных органов аналогична схемам ручных трубных ключей и рассчитана на один размер трубы. Поэтому ключ укомплектовывается набором трубозахватов разных размеров. Момент к вращателю передается от двигателя через преобразователь. В качестве двигателя используется гидравлический объемный шестеренчатого типа или аксиально-поршневой, реже лопастной. Преобразователь представляет собой шестеренчатый или цепной редуктор, дополненный коробкой передач, обычно двухскоростной. В качестве источника энергии для таких ключей, используется автоматическая установка с ДВС , приводящим в действие маслонасос или компрессор, укомплектованная емкостями, распределителями, клапанами и смонтированная на колесном шасси. Рабочий агент от установки к двигателю подается по шлангам. Ключи этого типа или подвешиваются на канате к вышке и вручную перемещаются к трубе и от нее, или устанавливаются на перемещающейся опоре.
Трубные механические подвижные ключи кольцевой неразъемной формы в основных деталях аналогичны разъемным. Отличаются лишь кольцеобразной замкнутой формой корпуса и вращателя. Во время СПО такой ключ после отвинчивания трубы опускается вниз для захвата элеватором очередной трубы, а затем после установки колонны в клиньях поднимается до уровня резьбового соединения для его захвата и отвинчивания.
Особенностями неподвижного кольцевого неразъемного ключа являются его простота и надежность. Ключ представляет собой червячный редуктор, шестерня которого оснащена упором, передающим вращающее усилие трубозахватному органу, червяк соединен с электродвигателем или гидромотором. Особенностью привода ключа этого типа является примененное в нем инерционное устройство в виде маховика, соединенного с электродвигателем. Для резкого увеличения момента на вращателе ключа, раскрученный маховик отдает накопленную энергию вращателю и через трубозахватное устройство трубе. Это позволяет исключить коробку скоростей и использовать маломощный двигатель. Обязательным требованием к приводу ключа является обеспечение его взрыво- и пожарной безопасности. Этому требованию полностью удовлетворяет гидравлический привод. На спуско-подъемные операции с применением этих ключей тратится значительно меньше времени.
СПО со штангами менее трудоемки чем с трубам. Из средств механизации СПО штанг сравнительно широкое применение получили только механические штанговые ключи. Эти ключи обеспечивают наибольшее ускорение операций свинчивания – развинчивания, облегчают ручной труд и обеспечивают стабильность момента свинчивания штанг. Методы конструирования трубных штанговых ключей всех назначений и типов аналогичны приемам расчета и конструирования редукторов и преобразователей общепромышленного назначения.
- Механические и автоматические спайдеры
Механические спайдеры позволяют полностью механизировать операции по перемещению клиньев. Конструкция механического спайдера представляет собой спайдер общего типа, в котором сборка клиньев кинематически связана с поршнем силового цилиндра. Поршень, перемещаясь под действием сжатого воздуха или под давлением рабочей жидкости, поднимает и опускает клинья в корпусе спайдера. Привод в первом случае от компрессора, во втором случае от силового маслонасоса. Системы привода включают в себя воздухо- и маслопроводы, клапанные устройства, распределители, органы управления. Особенностями автоматического спайдера являются способ приведения его в действие без специальной энергетической установки и автоматизация с обеспечением синхронности работы спайдера с колонной спускаемых и поднимаемых труб. При спуске колонн труб спайдер приводится в действие элеватором, при подъеме – специальной пружиной. Автоматизация работы спайдера полностью освобождает оператора не только от ручных операций, но и от управления спайдером и одновременно обеспечивает точность его срабатывания.
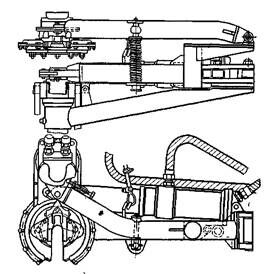
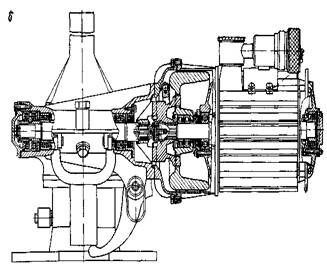
Конструкция автоматизированного спайдера системы Молчанова:
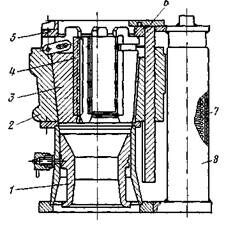
1 — центратор автоматический, 2 — корпус; 3 — клин; 4 — плашка, 5 — шайба;
6 — направляющая, 7 — пружина, 8— направление
Для обеспечения контакта по поверхности, а не по линиям тыльные поверхности клиньев и ответные спайдера имеют цилиндрическую форму, а не коническую. Оси цилиндрических поверхностей расположены под углом 9030’ к оси спайдера. Такая конструкция спайдера обеспечивает постоянно, независимо от положения клиньев по высоте ,одинаковую площадь контакта между клином и корпусом на несколько порядков большую, чем при конической форме, применяемой в спайдерах всех типов. Изменения формы контактной поверхности позволяет резко уменьшить напряжения, действующие в корпусах клиньев и спайдера и соответственно уменьшить в 3-3,5 раза массу спайдера при одновременном увеличении его долговечности.
Спайдер при грузоподъемности 80 тонн имеет массу 40 кг и рассчитан на трубы 48, 60, 73, 89 мм, для чего в его комплекте имеются сменные сборки клиньев.
4. Комбинированные средства механизации
Подавляющая часть текущих ремонтов скважин производится с одновременным использованием спайдера и механического ключа. Следовательно, возникла необходимость объединения их в один узел, т.е. агрегатирования. Это позволило создать механизм нового типа, представляющий собой комбинацию механического кольцевого неподвижного ключа, автоматического спайдера, автоматического центратора и электроинерционного привода. Такой механизм, предложенный Молчановым, называется автоматом. Часть автомата является неподвижным кольцевым механическим ключом, а вторая – автоматическим спайдером.
Часть 4 - лекция, которая пользуется популярностью у тех, кто читал эту лекцию.
Автоматы изготавливаются с электроинерционным и гидроприводом и рассчитаны на транспортировку и монтаж моноблоком в сборе или отдельными блоками. Автомат рассчитан на работу втулочными элеваторами.
Для механизации и автоматизации СПО с НКТ и кабелем предложено агрегатированное устройство, представляющие собой сочетание стандартного автомата со специальной приставкой – пьедесталом. Приставка автоматически снимает хомуты, которыми крепится кабель и направляет его в сторону.
При ремонтах скважин, в которых во время ремонта из-за отсутствия клапанов-отсекателей возможно фонтанирование, используются механические ключи разъемного типа. Они позволяют механизировать свинчивание-развинчивание НКТ с кабелем. В этом комбинированном устройстве и спайдер и механический ключ разъемные, что позволяет быстрее демонтировать их с устья скважины при аварийных ситуациях. Широкое применение всех перечисленных устройств позволяет резко увеличить темп ремонта скважины, производительность труда, безопасность и повысить качество ремонтов.
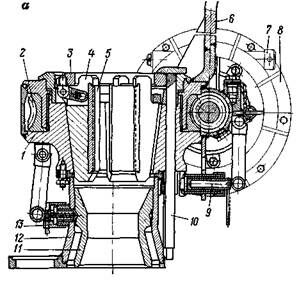
Автомат системы Молчанова



















