
Точечные путевые датчики
Тема лекции 14
Точечные путевые датчики
Датчики предназначены для преобразования контролируемой входной величины в другую физическую величину, более удобную для передачи воздействия на последующий элемент системы автоматики и телемеханики. Датчик качественно преобразует воздействия.
Широкое и разностороннее использование датчиков в системах автоматики и телемеханики обусловливает их большое разнообразие. По принципу действия датчики подразделяют на электромеханические, термоэлектрические, оптические, радиоизотопные и др.
Датчики, преобразующие изменение входной величины в изменение электрического параметра (сопротивления, индуктивности, емкости), называют параметрическими. Они относятся к пассивным элементам, требующим источник питания. Примерами пассивных датчиков могут служить фоторезисторы, угольные микрофоны и др.
Датчики, преобразующие входную величину в электрическую энергию (э.д.с.) на выходе, называют генераторными. Эти датчики не требуют дополнительного источника питания. Примерами генераторных датчиков могут служить тахогенераторы, в которых напряжение на выходе пропорционально частоте вращения; термопары, э.д.с. которых пропорциональны разности температур в точках соединения разнородных проводников; пьезодатчики, э.д.с. на выходах которых пропорциональны давлению, и др.
На железных дорогах датчики применяют для контроля проследования подвижного состава в системах полуавтоматической блокировки и автоматической переездной сигнализации, в системах счета осей, на сортировочных горках, в устройствах измерения скорости подвижного состава, в системах обнаружения перегрева букс, наличия ползунов на колесах, в системе автомашиниста для контроля проследования определенных точек пути и в других системах.
Рекомендуемые материалы
Электромеханические датчики в большинстве случаев служат для преобразования механических величин (перемещение, скорость, ускорение, давление, вибрация) в электрические (э.д.с., сопротивление, индуктивность, емкость). Иногда электромеханические датчики применяют и для обратного преобразования, т. е. для преобразования электрических величин в механические.
Широкое распространение в системах железнодорожной автоматики и телемеханики получили датчики проследования подвижного состава, называемые рельсовыми педалями.
Бесконтактная магнитная педаль ПБМ-56 по принципу действия является бесконтактным индуктивным датчиком и содержит сердечник из постоянного магнита с разомкнутой магнитной цепью и обмотку, насаженную на сердечник (рис. 2.1). Педаль крепят к рельсу с внутренней стороны колеи на 15 мм ниже уровня головки рельса. При приближении подвижной единицы (колеса) в педали уменьшается (шунтируется) воздушный зазор магнитной цепи, вследствие чего изменяется (возрастает) магнитный поток в сердечнике. При этом в обмотке индуцируется импульс э.д.с., амплитуда и длительность которого зависят от расстояния между колесами и датчиком и скорости прохождения подвижного состава над датчиком.
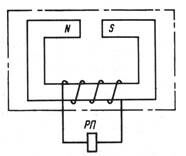
Рис. 2.1. Схема бесконтактной магнитной педали ПБМ-56
Когда колесо вагона удаляется от педали, снова изменяется магнитный поток (уменьшается) и в обмотке появляется импульс э.д.с. другой полярности. Импульсы э.д.с., получающиеся на выходе датчика ПБМ-56, могут непосредственно управлять работой чувствительного быстродействующего поляризованного реле РП. Однако реле реагирует лишь на импульсы, получающиеся при скоростях 1—30 км/ч, так как при скоростях менее 1 км/ч амплитуда импульса недостаточна для срабатывания реле, а при скоростях более 30 км/ч длительность импульса меньше времени срабатывания реле.
Для обеспечения надежной фиксации проследования подвижного состава при скоростях движения до 200 км/ч на выходе датчика ПБМ-56 включают усилительную полупроводниковую приставку, к которой подключается реле типа НМШ (на схеме не показано). Педаль ПБМ-56 применяют в основном в устройствах горочной автоматики и системах обнаружения перегретых букс ПОНАБ.
Трансформаторно-компенсационная педаль ТКП предназначена для работы в системах автоматики на сортировочных горках. Основным ее элементом (рис. 2.2) является дифференциальный измерительный трансформатор с S-образным сердечником 1. на котором закреплена питающая обмотка 3, соединенная с источником переменного тока 220 В, 50 Гц, сигнальная обмотка 2 и компенсационная обмотка 4, включенная встречно сигнальной. Педаль ТКП устанавливают внутри колеи так, чтобы стержень магнитопровода с сигнальной обмоткой 2 был обращен к рельсу. При отсутствии колеса в зоне действия педали переменный магнитный поток, создаваемый питающей обмоткой 3, индуцирует в сигнальной и компенсационной обмотках одинаковые э.д.с. На выходе педали э.д.с. отсутствует, так как эти обмотки включены встречно. При прохождении колеса около педали возрастает магнитный поток и э.д.с. у сигнальной обмотки вследствие уменьшения воздушного зазора, а у компенсационной обмотки магнитный поток и э.д.с. несколько уменьшаются; на выходе педали появляется напряжение, от которого срабатывает приемное устройство.
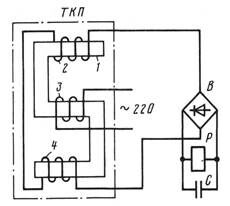
Рис. 2.2. Схема трансформаторно-компенсационной педали ТКП
В большинстве случаев в качестве приемника используют реле Р с выпрямителем В и сглаживающим конденсатором С. Педаль ТКП может работать в сочетании с электронно-релейным приемником. Допустимая длина кабелей между педалью ТКП и приемником равна 10 км. Благодаря применению дифференциальной системы обеспечивается высокая защита датчика от воздействия посторонних электромагнитных полей.
Магнито-электронный датчик (МЭД) может работать в диапазоне скоростей от 0 до 200 км/ч. Этот датчик может быть использован в устройствах, определяющих направление, скорость и ускорение подвижных единиц, в системах счета осей и других устройствах железнодорожной автоматики и телемеханики. Датчик устанавливают на внутренней стороне рельса. Принцип действия датчика основан на срыве колебаний автогенератора при прохождении колеса в зоне действия датчика. Для определения направления, скорости и ускорения движения, а также в системах счета осей используют два автогенератора.
Путевой датчик весомера (рис. 2.3) в системе АРС используется для определения весовой категории (легкой, легко-средней, средней и тяжелой) оси вагона при скатывании отцепов на сортировочных горках. При движении колеса вагона по пружинному мостику 1 из легированной стали, укрепленному на рельсовой вставке 2, опускается палец 5, который поворачивает по часовой стрелке ось 6 с насаженной на нее рычажной передачей 4, связанной с текстолитовым поводком 8 и контактами 3. В зависимости от веса подвижной единицы замыкаются контакты датчика. Зазоры контактов выполнены так, что m1<m2<m3<m4. Поэтому при следовании по пружинному мостику легкой подвижной единицы замыкается только контакт I, имеющий наименьший зазор между упорной и контактной пружинами. При следовании легко-средней подвижной единицы замыкаются контакты I и II, средней — I, II и III и тяжелой — I, II, III и IV.
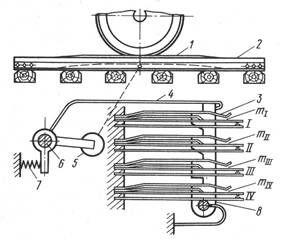
Рис. 2.3. Кинематическая схема весомера
Через эти контакты от генератора импульсов в ячейку вычисления средневесовой категории поступают электрические импульсы. Пружина 7 служит для возвращения контактной системы в исходное положение после проследования подвижной единицы.
В качестве электрических датчиков угловой скорости в промышленности и на транспорте широко применяют тахогенераторы. В тахогенераторах постоянного тока э.д.с. пропорциональна частоте вращения w:
E=kw.
Что такое проект и управление проектами - лекция, которая пользуется популярностью у тех, кто читал эту лекцию.
В тахогенераторах переменного тока при изменении скорости вращения изменяются амплитуда Е и частота f выходного напряжения: E=k1w; f=k2w, где k1 и k2—коэффициенты, определяемые конструкцией датчика.
В системах АЛС с авторегулированием скорости, разработанных для линий метрополитена и высокоскоростных линий, применяют датчик скорости ДС. Так как скорость движения поезда пропорциональна угловой скорости (частоте вращения колеса), то, зная диаметр колеса D, можно определить линейную скорость (скорость движения поезда):
v=pDw.
Таким образом, частота и напряжение на выходе датчика пропорциональны скорости движения поезда E=k3v; f=k4v, где k3 и k4 — коэффициенты, определяемые конструкцией датчика ДС, диаметром колеса и числом зубьев ротора датчика.
В радиолокационном измерителе скорости, применяемом в системе АРС на сортировочных горках, действие датчика скорости основано на использовании эффекта Допплера. Этот эффект заключается в том, что сигнал в виде электромагнитной волны, отраженный от движущегося объекта, изменяет свою частоту пропорционально скорости движения объекта. Таким образом, механическая величина — перемещение — преобразуется в изменение частоты электрического сигнала.
Для определения скорости отцепа на сортировочной горке устанавливают передатчик высокочастотных колебаний (с длиной волны нескольких сантиметров или миллиметров). С помощью специальной антенны эти электромагнитные колебания направляют острым пучком вслед движущемуся отцепу. Отраженный луч воспринимается приемной антенной. Частота отраженного сигнала отличается от передаваемого на значение Df, пропорциональное скорости движения отцепа. По разности частот Df передаваемого и принимаемого сигналов определяют скорость движения отцепа.




















