Система прерывания программ
Система прерывания программ. Основные функции системы прерывания программ. Вложение прерываний.
Во время выполнения ЭВМ текущей программы внутри машины и в связанной с ней внешней среде (технологический процесс, управляемый ЭВМ) могут возникать события, требующие немедленной реакции на них со стороны машины.
Реакция состоит в том, что машина прерывает обработку текущей программы и переходит к выполнению некоторой другой программы, специально предназначенной для данного события. По завершению этой программы ЭВМ возвращается к выполнению прерванной программы.
Принципиально важным является то, что моменты возникновения событий, требующих прерывания программ, заранее не известны и поэтому не могут быть учтены при программировании.
Каждое событие, требующее прерывания, сопровождается сигналом, который называют запросом прерывания.
Программу, затребованную запросом прерывания, называют прерывающей программой, противопоставляя ее прерываемой программе, выполнявшейся в ЭВМ до появления запроса.
Запросы на прерывания могут возникать внутри самой ЭВМ и в ее внешней среде. К первым относятся, например, запросы при возникновении в ЭВМ таких событий, как появление ошибки в работе ее аппаратуры, переполнение разрядной сетки, попытка деления на 0, выход из установленной для данной программы области памяти, затребование периферийным устройством операции ввода-вывода, завершение операции ввода-вывода периферийным устройством или возникновение при этой операции особой ситуации и др. Хотя некоторые из указанных событий порождаются самой программой, моменты их появления, как правило, невозможно предусмотреть. Запросы во внешней среде могут возникать от других ЭВМ, от аварийных и некоторых других датчиков технологического процесса и т.п.
Таким образом, запросы прерывания генерируются несколькими развивающимися параллельно во времени процессами, которые в некоторые моменты требуют вмешательства процессора.
К этим процессам, в частности, относится процесс выполнения самой программы, процесс контроля правильности работы ЭВМ, операции ввода-вывода, технологический процесс в управляемом машиной объекте и др.
Рекомендуемые материалы

Возможность прерывания программ - важное архитектурное свойство ЭВМ, позволяющее эффективно использовать производительность процессора при наличии нескольких, протекающих параллельно во времени, процессов, требующих в произвольные моменты времени управления и обслуживания со стороны процессора. В первую очередь это относится к организации параллельной во времени работы процессора и периферийных устройств машины, а также к использованию ЭВМ для управления в реальном времени технологическими процессами,
Чтобы ЭВМ могла, не требуя больших усилий от программиста, реализовывать с высоким быстродействием прерывания программ, машине необходимо придать соответствующие аппаратурные и программные средства, совокупность которых получила название системы прерывания программ. В качестве аппаратных средств используется контроллер прерывания (блок прерывания).
Основными функциями системы прерывания являются:
- запоминание состояния прерываемой программы и осуществление перехода к прерывающей программе;
- восстановление состояния прерванной программы и возврат к ней. При наличии нескольких источников запросов прерывания между ними должны быть установлены приоритетные соотношения, определяющие, какой из нескольких поступивших запросов подлежит обработке в первую очередь, и устанавливающие: имеет право или нет данный запрос (прерывающая программа) прерывать ту или иную программу.
Характеристики системы прерывания
Для оценки эффективности систем прерывания могут быть использованы следующие характеристики.
1. Общее число запросов прерывания (входов в систему прерывания).
2. Время реакции — время между появлением запроса прерывания и моментом прерывания текущей программы. На рис. 3.11 приведена упрощенная временная диаграмма процесса прерывания.
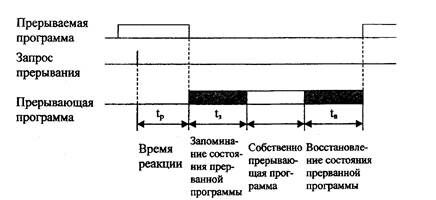
Рис.3.11. Упрощенная временная диаграмма процесса прерывания
Для одного и того же запроса задержки в исполнении прерывающей программы зависят от того, сколько программ со старшим приоритетом ждут обслуживания, поэтому время реакции определяют для запроса с наивысшим приоритетом (tр).
Время реакции зависит от того, в какой момент допустимо прерывание. Большей частью прерывание допускается после окончания текущей команды. В этом случае время реакции определяется в основном длительностью выполнения команды.
Это время реакции может оказаться недопустимо большим для ЭВМ, предназначенных для работы в реальном масштабе времени. В таких машинах часто допускается прерывание после любого такта выполнения команды (микрокоманды). Однако при этом возрастает количество информации, подлежащей запоминанию и восстановлению при переключении программ, так как в этом случае необходимо сохранять также и состояние в момент прерывания счетчика тактов, регистра кода операции и некоторых других узлов, поэтому такая организация прерывания возможна только в машинах с быстродействующей сверхоперативной памятью.
Имеются ситуации, в которых желательно немедленное прерывание. Если аппаратура контроля обнаружила ошибку, то целесообразно сразу же прервать операцию, пока ошибка не оказала влияние на следующие такты работы программы.
3. Затраты времени на переключение программ (издержки прерывания) равны суммарному расходу времени на запоминание и восстановление состояния программы
4. Глубина прерывания - максимальное число программ, которые могут прерывать друг друга. Если после перехода к прерывающей программе и вплоть до ее окончания прием запросов прекращается, то говорят, что система имеет глубину прерывания, равную 1. Глубина равна n, если допускается последовательное прерывание до n программ.
Если запрос окажется не обслуженным к моменту прихода нового запроса от того же источника, то возникает так называемое насыщение системы прерывания.
В этом случае предыдущий запрос от данного источника будет машинально утерян, что недопустимо.
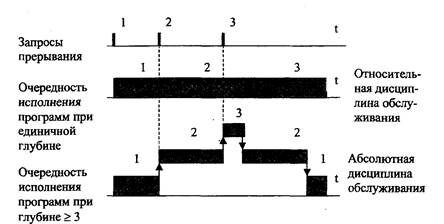
Рис.3.12. Процессы прерывания с различной глубиной прерывания и дисциплиной обслуживания
5. Число классов (уровней) прерывания. В ЭВМ число различных запросов (причин) прерывания может достигать нескольких десятков или сотен. В таких случаях часть запросов разделяют на отдельные классы или уровни.
Совокупность запросов, инициирующих одну и ту же прерывающую программу, образует класс или уровень прерывания (рис. 3.13).
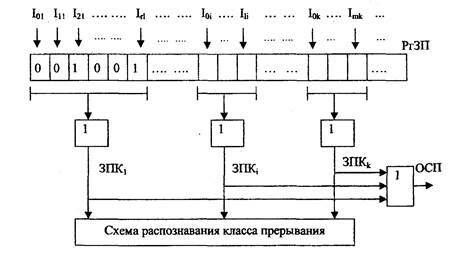
Рис.3.13. Разделение запросов на классы прерывания
Запросы всех источников прерывания поступают на регистр запросов прерывания РгЗП, устанавливая соответствующие его разряды в состояние 1, указывающее на наличие запроса прерывания определенного источника. Запросы классов прерывания ЗПК1-ЗПКk формируются элементами ИЛИ, объединяющими разряды РгЗП, относящиеся к соответствующим классам (уровням). Еще одна схема ИЛИ формирует общий сигнал прерывания ОСП, поступающий в устройство управления процессора.
Информация о действительной причине прерывания, породившей запрос данного класса, содержится в коде прерывания, который отражает состояние разрядов РгЗП, относящихся к данному классу прерывания.
После принятия запроса прерывания на исполнение и передачу управления прерывающей программе соответствующий триггер РгЗП сбрасывается. Объединение запросов в классы прерывания позволяет уменьшить объем аппаратуры. но приводит к замедлению работы системы прерывания.
Программно-управляемый приоритет прерывающих программ
Относительная степень важности программ, их частота повторения, относительная степень срочности в ходе вычислительного процесса могут меняться, требуя установления новых приоритетных отношений. Поэтому во многих случаях приоритет между прерывающими программами не может быть зафиксирован раз и навсегда. Необходимо иметь возможность изменять по мере необходимости приоритетные соотношения программным путем. Приоритет между прерывающими программами должен быть динамичным, т.е. программно управляемым.
В ЭВМ широко применяются два способа программно-управляемого приоритета прерывающих программ:
Люди также интересуются этой лекцией: 4 - Гидроцилиндры.
- использование порога прерывания;
- использование маски прерывания.
Порог прерывания. Этот способ позволяет в ходе вычислительного процесса программным путем изменить уровень приоритета процессора (а следовательно, и обрабатываемой в данный момент на процессоре программы) относительно приоритетов запросов источников прерывания (периферийных устройств), другими словами, задавать порог прерывания, т. е. минимальный уровень приоритета запросов, которым разрешается прерывать программу, идущую на процессоре.
Порог прерывания задается командой программы, устанавливающей в регистре порога прерывания код порога прерывания. Специальная схема выделяет наиболее приоритетный запрос, сравнивает его приоритет с порогом прерывания и, если он оказывается выше порога, вырабатывает общий сигнал прерывания, и начинается процедура прерывания.
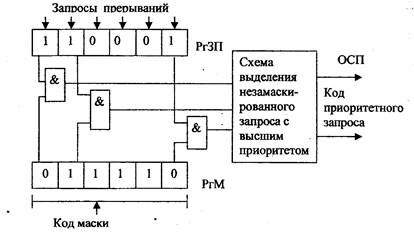
Маска прерывания представляет собой двоичный код, разряды которого поставлены в соответствие запросам или классам (уровням) прерываний. Маска загружается командой программы в регистр маски (рис. 3.14).