
Меры нечеткости
Лекция 13
4.12 Меры нечеткости
Степень недетерминированности должна измеряться обобщенной нечеткостью, сопутствующей порождению данных. А значит, она должна быть определена через порождающие функции поведения  и для нейтральных и направленных систем с поведением. Если эти функции представляют собой функции распределения вероятностей, то мера обобщенной нечеткости хорошо известна — это шенноновская энтропия
и для нейтральных и направленных систем с поведением. Если эти функции представляют собой функции распределения вероятностей, то мера обобщенной нечеткости хорошо известна — это шенноновская энтропия
 ,(4.37)
,(4.37)
Она измеряет нечеткость в единицах, называемых битами.
Если предположить, что любое конечное множество X рассматриваемых альтернативных выходных значений характеризуется определенным распределением вероятностей, то удобнее упростить обозначения и писать  вместо
вместо  .
.
Легко видеть, что
 ,(4.38)
,(4.38)
Рекомендуемые материалы
Нижняя граница  достигается в том случае, когда вероятности всех выходных значений, за исключением одного, равны 0; верхняя граница достигается тогда, когда вероятности всех событий одинаковы, т. е. равны
достигается в том случае, когда вероятности всех выходных значений, за исключением одного, равны 0; верхняя граница достигается тогда, когда вероятности всех событий одинаковы, т. е. равны  . Отношение энтропии к ее верхней границе
. Отношение энтропии к ее верхней границе
 ,(4.39)
,(4.39)
называется нормализованной энтропией; понятно, что
 , (4.40)
, (4.40)
В нашем случае множествами выходов являются множества  а распределения вероятностей представляются функциями поведения
а распределения вероятностей представляются функциями поведения  , определяемыми соответственно формулами (4.11), (4.17), (4.27), (4.30). Для упрощения записи опустим индексы В и GB, а также знак ^ . Таким образом,
, определяемыми соответственно формулами (4.11), (4.17), (4.27), (4.30). Для упрощения записи опустим индексы В и GB, а также знак ^ . Таким образом,
 ,(4.41)
,(4.41)
обозначают вероятности, определяемые соответственно формулами (4.11), (4.17), (4.27), (4.30); смысл любого из этих обозначений однозначно определяется заключенными в скобки аргументами. Кроме того, определим безусловные вероятности
 , (4.42)
, (4.42)
где  указывает на то, что
указывает на то, что  является подмножеством состояния с (подсостоянием с); формально, если
является подмножеством состояния с (подсостоянием с); формально, если
 ,(4.43)
,(4.43)
 ,(4.44)
,(4.44)
то  тогда и только тогда, когда
тогда и только тогда, когда  для всех
для всех  . Для направленных систем безусловные вероятности вычисляются по немного измененной формуле
. Для направленных систем безусловные вероятности вычисляются по немного измененной формуле
 , (4.45)
, (4.45)
Условные вероятности, характеризующие процесс порождения данных, связаны с основными (совместными) и безусловными вероятностями следующим образом:
 ;(4.46)
;(4.46)
 .(4.47)
.(4.47)
Первая формула описывает эту связь для нейтральных, а вторая — для направленных систем.
4.13 Методы вычислений нечеткости
При заданной порождающей маске для нейтральной системы, через которую определяются множества состояний  генерируемых и генерирующих выборочных переменных, порождающая нечеткость
генерируемых и генерирующих выборочных переменных, порождающая нечеткость  определяется как средняя нечеткость, базирующаяся на вероятностях
определяется как средняя нечеткость, базирующаяся на вероятностях  , взвешенных вероятностями
, взвешенных вероятностями  порождающих условий:
порождающих условий:
 . (4.48)
. (4.48)
Это значение определяет степень недетерминированности данной нейтральной порождающей системы с поведением.
Для направленных систем порождающая нечеткость  вычисляется по формуле
вычисляется по формуле
 ,(4.49)
,(4.49)
которую можно непосредственно применять в том случае, когда можно и имеет смысл определять вероятности , т. е. когда направленная система получена из нейтральной. Если мы не располагаем вероятностями состояний элементов множества Е или эти вероятности несущественны, тогда в качестве базовых вероятностей берутся вероятности
, т. е. когда направленная система получена из нейтральной. Если мы не располагаем вероятностями состояний элементов множества Е или эти вероятности несущественны, тогда в качестве базовых вероятностей берутся вероятности  [аналог вероятностей f(c) для нейтральных систем], исходя из которых вычисляются остальные необходимые вероятности. В этом случае нечеткость
[аналог вероятностей f(c) для нейтральных систем], исходя из которых вычисляются остальные необходимые вероятности. В этом случае нечеткость  вычисляется формуле (4.50)
вычисляется формуле (4.50)
 |
где вероятности
 и
и  вычисляются по заданным вероятностям
вычисляются по заданным вероятностям  согласно формулам (4.45) и (4.47).
согласно формулам (4.45) и (4.47).  Формулы (4.48), (4.49) и (4.50) можно заменить другими, более удобными для вычисления. Например, уравнение (4.48) можно модифицировать следующим образом:
Формулы (4.48), (4.49) и (4.50) можно заменить другими, более удобными для вычисления. Например, уравнение (4.48) можно модифицировать следующим образом:
 ,(4.51)
,(4.51)
Таким образом,  можно вычислить, не используя условные вероятности, по формуле
можно вычислить, не используя условные вероятности, по формуле
 (4.52)
(4.52)
Точно так же уравнения (3.49) и (3.50) можно заменить соответственно уравнениями
 (4.53)
(4.53)
Максимальное значение порождающей нечеткости любого типа равно ; следовательно, нормализованная порождающая нечеткость получается делением порождающей нечеткости на ее максимальное значение. Например,
; следовательно, нормализованная порождающая нечеткость получается делением порождающей нечеткости на ее максимальное значение. Например,
 ,(4.54)
,(4.54)
Пример 4.2. На рис. 4.5,а показана вероятностная функция поведения  для четырех выборочных переменных
для четырех выборочных переменных  каждая с двумя состояниями — 0 и 1. Состояния с нулевой вероятностью в таблице не приводятся. Выборочные переменные определены через две базовые переменные
каждая с двумя состояниями — 0 и 1. Состояния с нулевой вероятностью в таблице не приводятся. Выборочные переменные определены через две базовые переменные  с помощью маски, изображенной на рис. 3.7,а. Поскольку выборочные переменные
с помощью маски, изображенной на рис. 3.7,а. Поскольку выборочные переменные  суть сдвиги одной и той же базовой переменной
суть сдвиги одной и той же базовой переменной , распределения вероятностей их состояний должны быть одинаковы; они и в самом деле одинаковы; оба имеют вероятности 0.7 и 0.3 соответственно для состояний 0 и 1. Аналогично переменные
, распределения вероятностей их состояний должны быть одинаковы; они и в самом деле одинаковы; оба имеют вероятности 0.7 и 0.3 соответственно для состояний 0 и 1. Аналогично переменные  (сдвиги
(сдвиги ) имеют одинаковое распределение вероятностей: 0.6 и 0,4 соответственно для состояний 0 и 1. Следовательно, для данной маски приведенная функция распределения вероятностей является корректной функцией поведения.
) имеют одинаковое распределение вероятностей: 0.6 и 0,4 соответственно для состояний 0 и 1. Следовательно, для данной маски приведенная функция распределения вероятностей является корректной функцией поведения.
Если данная система интерпретируется как нейтральная, ее порождающая нечеткость может быть вычислена по формуле (4.52). Для первого члена формулы мы имеем
может быть вычислена по формуле (4.52). Для первого члена формулы мы имеем

Значение второго члена зависит от порядка порождения и от соответствующей маски. На рис. 4.5,в и г показаны два возможных порядка порождения. Для порождения слева направо имеем
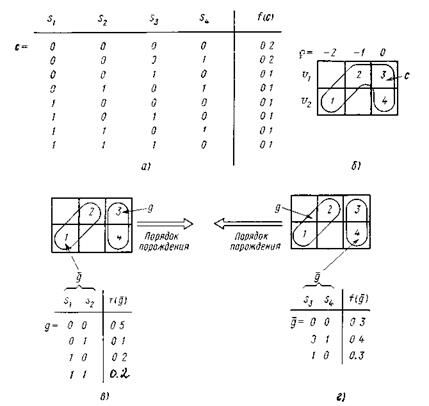
Рис. 4.5 Вероятностная нейтральная система
Для другого порядка порождения (рис. 4.5,г) мы получим

Следовательно, нам можно выбрать один из двух порядков порождения; первый порядок предпочтительнее, так как имеет более низкую порождаемую нечеткость. Поскольку в данном примере  , то нормализованные значения вычислительных порождающих нечеткостей получаются делением их на два.
, то нормализованные значения вычислительных порождающих нечеткостей получаются делением их на два.
В некоторых случаях применим только один порядок порождения. Если, например, параметром является время, то в каждом случае имеет смысл только один из порядков, определяемый целью использования системы с поведением. Если она используется для предсказания, то состояния должны порождаться в порядке возрастания времени (слева направо); если же она используется для ретроспекции, то состояния должны порождаться в порядке убывания времени. В данном примере, если параметром является время, то оказывается легче предсказывать будущие состояния системы, чем определять прошлые.
Предположим теперь, что  интерпретируется как входная переменная и что по функции поведения на рис. 4.5,а определена соответствующая направленная система. Теперь для вычисления порождающей нечеткости можно воспользоваться формулой (4.53). Нечеткость
интерпретируется как входная переменная и что по функции поведения на рис. 4.5,а определена соответствующая направленная система. Теперь для вычисления порождающей нечеткости можно воспользоваться формулой (4.53). Нечеткость  уже была вычислена раньше;
уже была вычислена раньше; зависит от порядка порождения. В любом случае множество Е представляется состояниями переменных
зависит от порядка порождения. В любом случае множество Е представляется состояниями переменных представляется или состояниями
представляется или состояниями (в порядке возрастания параметра) или состояниями
(в порядке возрастания параметра) или состояниями (в порядке убывания параметра). В первом случае нечеткость
(в порядке убывания параметра). В первом случае нечеткость связана с переменными
связана с переменными
Во втором случае она представляет нечеткость переменных :
:

Таким образом, снова оказывается, что предсказывать будущие состояния легче, чем определять прошлые.
Предположим теперь, что мы не располагаем никакой информацией относительно входной переменной или что эта информация несущественна (например, в том случае, когда
или что эта информация несущественна (например, в том случае, когда  контролируется пользователем). Тогда все вычисления должны проводиться для приведенных на рис. 4.6,а условных вероятностей. Как показано на этом рисунке, список вероятностей разбит
контролируется пользователем). Тогда все вычисления должны проводиться для приведенных на рис. 4.6,а условных вероятностей. Как показано на этом рисунке, список вероятностей разбит на четыре части, соответствующие разным состояниям е. Нечеткости для каждого состояния также приведены на рис. 4.6,а. Здесь же показано разбиение маски на
на четыре части, соответствующие разным состояниям е. Нечеткости для каждого состояния также приведены на рис. 4.6,а. Здесь же показано разбиение маски на
Ситуация при порождении состояний слева направо, включая значения для каждого состояния е, показана на рис. 4.6,в.
для каждого состояния е, показана на рис. 4.6,в.
Из формулы (4.53) получим

Другой порядок порождения изображен на рис. 4.8,г. Для него имеем
8 Выражения - лекция, которая пользуется популярностью у тех, кто читал эту лекцию.

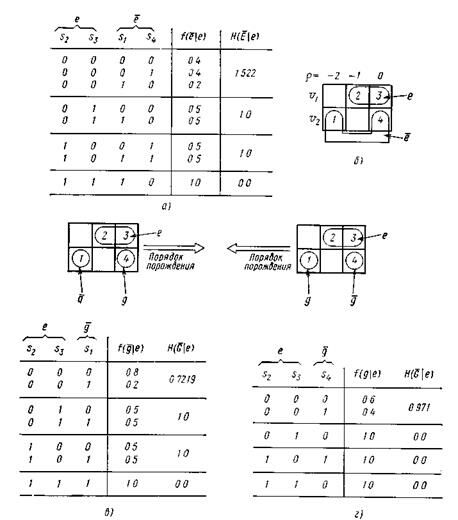
Рис. 4.6 Вероятностная направленная система
К.Р. № 13
Рассчитать порождающую нечеткость для случая направленной и нейтральной системы с поведением. Рассмотреть оба порядка порождения.


















