
Специальные виды реле: магнитоэлектрические и электродинамические
Глава 19
СПЕЦИАЛЬНЫЕ ВИДЫ РЕЛЕ
§ 19.1. Типы специальных реле
Наибольшее распространение в системах автоматики получили реле электромагнитного типа, рассмотренные в гл. 17 и 18. Однако находят применение и электрические реле других типов, в которых тяговое усилие, необходимое для переключения контактов, создается не с помощью электромагнита. Сюда относятся прежде всего реле, аналогичные по принципу действия электроизмерительным приборам различных систем: магнитоэлектрической, электродинамической, индукционной. Если в электроизмерительном приборе подвижная часть перемещает по шкале стрелку или какой-либо указатель, то в реле соответствующего типа подвижная часть перемещает контакты.
Для получения значительных выдержек* времени при замыкании и размыкании контактов используются специальные реле времени; некоторые из них имеют в основе электромагнитный механизм, но с добавлением различных устройств, обеспечивающих задержку срабатывания или отпускания.
Для автоматизации процессов нагрева и охлаждения применяются электротермические реле, в которых переключение электрических контактов обеспечивается температурной деформацией металлов или температурным расширением жидкостей и газов.
В системах автоматической защиты оборудования от аварийных режимов используются специальные реле, срабатывающие при определенном значении тока, напряжения, скорости, момента, давления и других параметров.
Рекомендуемые материалы
§ 19.2. Магнитоэлектрические реле
Принцип действия магнитоэлектрического реле основан на взаимодействии магнитного поля постоянного магнита с током, протекающим по обмотке, выполненной в виде поворотной рамки.
 Магнитоэлектрическое реле (рис. 19.1, а) состоит из постоянного магнита /, между полюсными наконечниками которого находится цилиндрический стальной сердечник 2. В кольцепом зазоре между полюсными наконечниками и сердечником создается равномерное радиальпо направленное магнитное поле. В зазоре размещена легкая алюминиевая рамка 3 с обмоткой из тонкого провода, к которой подводится ток по спиральным пружинам из фосфористой или оловянно-цинковой бронзы. Эти пружины создают противодействующий момент, стремящийся установить рамку с обмоткой таким образом, чтобы ее плоскость была направлена по оси полюсов магнита /. При пропускании тока / по
Магнитоэлектрическое реле (рис. 19.1, а) состоит из постоянного магнита /, между полюсными наконечниками которого находится цилиндрический стальной сердечник 2. В кольцепом зазоре между полюсными наконечниками и сердечником создается равномерное радиальпо направленное магнитное поле. В зазоре размещена легкая алюминиевая рамка 3 с обмоткой из тонкого провода, к которой подводится ток по спиральным пружинам из фосфористой или оловянно-цинковой бронзы. Эти пружины создают противодействующий момент, стремящийся установить рамку с обмоткой таким образом, чтобы ее плоскость была направлена по оси полюсов магнита /. При пропускании тока / по
оомотке реле на рамку с обмоткой действует вращающий момент, заставляющий ее поворачиваться вокруг оси в направлении, определяемом полярностью тока. Жестко закрепленный на рамке подвижный контакт 4 замыкается с одним из неподвижных контактов 5 или 6.
Сила, действующая па проводник длиной /, обтекаемый током / н помещенный в магнитное поле с индукцией В, определяется на основании закона Ампера:
 |
На рамку длимой /, шириной а, с числом витков w действует вращающий момент
 |
Из уравнения (19.3) видно, что при неизменных конструктивных параметрах реле и заданном токе / в его обмотке вращающий момент имеет постоянное значение.
В то же время противодействующий момент, создаваемый закручивающимися токоподводящими пружинами, пропорционален углу закрутки, т. е. углу поворота рамки. Поскольку направление поворота рамки определяется направлением тока в обмотке, магнитоэлектрическое реле является поляризованным и может быть выполнено трехпозиционным.
По сравнению с другими электромеханическими реле магнитоэлектрическое реле является наиболее чувствительным, оно срабатывает при мощности управления в доли милливатта. Усилие па контактах магнитоэлектрического реле невелико (порядка 10-2 Н и меньше), поэтому для повышения надежности контакты выполняются из платины и платипоиридиевого сплава. При резком изменении усилия маломощные контакты быстро изнашиваются, поэтому магнитоэлектрические реле используются обычно в схемах, где сигнал постоянного тока изменяется медленно. Недостатком магнитоэлектрических реле является сравнительно большое время срабатывания (0.1—0,2 с). По своему быстродействию они уступают нейтральным электромагнитным реле.
§ 19.3. Электродинамические реле
 Принцип действия электродинамического реле основан на взаимодействии двух катушек с током, одна из которых подвнжпа, а другая неподвижна.
Принцип действия электродинамического реле основан на взаимодействии двух катушек с током, одна из которых подвнжпа, а другая неподвижна.
От магнитоэлектрического реле электродинамическое реле отличается тем, что индукция в рабочем зазоре создается не постоянным магнитом, а неподвижной катушкой иа сердечнике, т. е. элекртомаг-нитным способом. От электромагнитного реле электродинамическое реле отличается тем, что тяговое усилие воздействует не на стальной якорь, а на подвижную катушку. Устройство электродинамического реле показано на рис. 19.2. На магиито-провод 3 надета неподвижная катушка
2, обтекаемая током l2. Между полюсными наконечниками магни-топровода находится цилиндрический стальной сердечник 4. В кольцевом зазоре между полюсными наконечниками и сердечником создается равномерное радиэльно направленное магнитное
поле. В зазоре размещена легкая алюминиевая рамка 1 с обмоткой из тонкого провода, к которой подводится ток Ii по спиральным пружинам, создающим противодействующий момент, стремящийся установить плоскость рамки 1 вдоль оси полюсных наконечников.
При подаче управляющего тока Ii в обмотку рамки 1 она будет поворачиваться в зазоре между полюсными наконечниками и сердечником. Жестко закрепленный па рамке подвижный контакт 5 замыкается с одним из неподвижных контактов 6 и 7.
Сила, действующая на проводники рамки электродинамического реле, так же как и для магнитоэлектрического реле, определяется законом Ампера. Следовательно, будут справедливы уравнения (19.1) и (19.2). Однако входящая в эти уравнения индукция В не постоянна, а определяется намагничивающей силой, создаваемой катушкой 2 с током I2:
 |
(19.4)
где Rм — магнитное сопротивление на пути магнитного потока возбуждения; s6 — площадь поперечного сечения рабочего воздушного зазора.
Подставляя (19.4) в (19.2) и выразив через постоянный коэффициент К сочетание всех неизменных конструктивных и обмоточных данных реле, получим уравнение для вращающего момента электродинамического реле:
 |
Однако в отличие от магнитоэлектрического реле электродинамическое может работать при питании переменным током. В этом случае на рамку воздействует переменный магнитный поток а направление поворота определяется средним за период значением вращающего момента
 |
где /1 и /2—действующие значения токов в обмотках;  — угол сдвига фаз между токами.
— угол сдвига фаз между токами.
Из (19.6) следует, что электродинамическое реле реагирует на фазу входного сигнала, т. е. его можно использовать как реле сдвига фаз, срабатывающее при определенном значении . Это же реле может реагировать и на мощность переменного или постоянного тока. В этом случае на одну из обмоток подается ток, а на другую —напряжение цепи.
При последовательном соединении обмоток I1 — I2=I вращающий момент
Мвp = КI2, (19.7)
т. е. зависимость тягового усилия от тока будет аналогична электромагнитному нейтральному реле.
К недостаткам электродинамических реле следует отнести их большие габариты и вес.
§ 19.4. Индукционные реле
Принцип действия индукционного реле основан на взаимодействии переменных магнитных потоков с токами, индуцированными этими потоками.
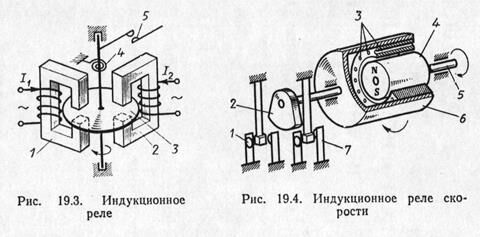
Индукционное реле (рис. 19.3) состоит из двух неподвижных электромагнитов 1 и 2, по обмоткам которых протекают соответственно переменные токи I1 и I2 В воздушном зазоре электромагнитов установлен алюминиевый или медный диск 3, который может поворачиваться относительно оси 4. Переменные магнитные потоки, создаваемые электромагнитами 1 и 2, индуцируют ЭДС в диске 3, под действием которых по диску протекают токи (так же, как в короткозамкнутом роторе асинхронного двигателя).
Для того чтобы взаимодействие магнитных потоков с вызванными ими же токами привело к созданию вращающего момента, необходимо наличие сдвига по фазе токов I1 и I2. Только в этом случае в зазоре индукционного реле будет создано вращающееся магнитное поле, аналогично тому, как это происходит в двухфазном асинхронном двигателе. При сдвиге фаз между токами I1 и I2 в 90° сила взаимодействия магнитного потока электромагнита 1 с током, индуцированным в диске от потока электромагнита 2, будет всегда совпадать по направлению с силой взаимодействия магнитного потока электромагнита 2 с током, индуцированным в диске от потока электромагнита 1. При совпадении токов I1 и I2 по фазе в среднем за период результирующая сила будет равна нулю.
Вращающий момент, приложенный к диску, определяется так:
 |
где К — постоянный коэффициент, зависящий от конструктивных и обмоточных данных реле; — фазовый сдвиг между I1 и I2.
Этот вращающий момент, преодолевая сопротивление пружины 4, поворачивает диск до тех пор, пока не замкнутся контакты 5.
Поскольку индукционное реле реагирует на фазу, его (как и электродинамическое) можно применять в качестве реле фазы. Малая инерция подвижной части позволяет использовать такие реле как быстродействующие в схемах автоматической защиты и блокировки. Особенно они распространены в автоматике на железных дорогах. Они могут использоваться в качестве реле тока, напряжения, мощности, частоты, фазы, сопротивления. Достоинством их является то, что они не требуют подвода тока к подвижной части. Чувствительность индукционных реле невелика, для их срабатывания требуется мощность не менее 0,5 Вт.
Рассмотрим также применение индукционного реле в качестве реле скорости (рис. 19.4). Входной вал 5 реле связан с механизмом, скорость которого требуется контролировать. На валу 5 установлен цилиндрический постоянный магнит 4. При вращении поле магнита пересекает проводники короткозамкнутой обмотки 3 поворотного статора 6. В обмотке 3 наводится ЭДС, значение которой пропорционально скорости вращения входного вала 5. Под действием этой ЭДС по обмотке 3 проходит ток, сила взаимодействия которого с вращающимся полем магнита 4 стремится повернуть статор 6 в направлении вращения. При определенной скорости вращения сила возрастает настолько, что упор 2, преодолевая противодействие плоской пружины, переключает контакты реле. В зависимости от направления вращения переключается контактный узел / или 7. Точность работы индукционного реле скорости невелика. В точных системах контроля скорости необходимо использование более сложной схемы, включающей в себя индукционный датчик скорости и высокочувствительное поляризованное реле.
§ 19.5. Реле времени
Для получения больших замедлений при включении и отключении контактов используются реле времени. В этих реле обычно используют электромагнит, который приводит в действие какое-либо механическое устройство, имеющее значительную инерционность, либо включает электродвигатель, перемещающий контакты через понижающий редуктор с большим передаточным отношением.
 |
Рассмотрим в качестве примера несколько типов реле времени.
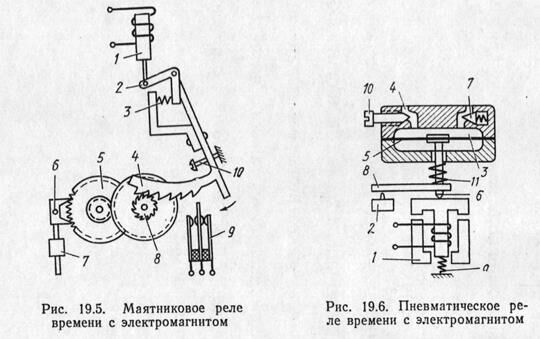
Маятниковое (часовое) реле времени (рис. 19.5) состоит из электромагнита с втяжным якорем 1, который при подаче входного сигнала перемещает тягу 2 и, сжимая пружину 3, стремится переместить рычаг с зубчатым сектором 4 справа налево. Но спусковое зубчатое колесо 5 со скобой 6 может поворачиваться за каждое качание маятника 7 только на один зуб, благодаря чему скорость перемещения зубчатого сектора ограничивается. После того как все зубцы сектора 4 выйдут из зацепления с храповым колесом 8, сработает микропереключатель 9.
При снятии выходного сигнала с электромагнита 1 сектор 4 быстро возвращается в исходное положение под действием веса якоря электромагнита / и усилия пружины 3. Микропереключатель выключается без задержки времени. Таким образом, обеспечивается задержка времени только при срабатывании реле, но не при отпускании.
§ 19.6. Электротермические реле
Электротермические реле предназначены для автоматического переключения электрических контактов в зависимости от температуры. Задача поддержания необходимой температуры или отключения какого-либо устройства при достижении некоторой температуры очень распространена в технике, причем не только
в промышленной, но и в бытовой. Например, в холодильнике, в электроутюге, в духовке электрической плиты установлены электротермические реле, которые также часто называют тепловыми реле. Потребность в тепловых реле исчисляется миллионами штук в год, поэтому главными требованиями к ним являются простота, дешевизна, надежность.
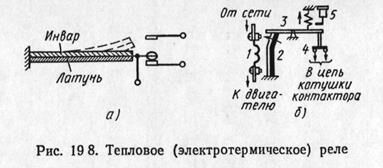
Наиболее широкое распространение получили биметаллические реле. Элементом, воспринимающим температуру, в таких реле является биметаллическая пластина (рис. 19.8, а). Она состоит из слоев двух металлов с разными температурными коэффициентами линейного расширения. Например, для латуни этот коэффициент почти в 20 раз больше, чем для инвара (сплав стали с никелем и кобальтом). Поэтому при увеличении температуры слой латуни удлиняется значительно больше, чем слой инвара. Эти слои соединены жестко (сваркой или пайкой), и вся биметаллическая пластина при нагреве изгибается в сторону инвара. Поскольку один конец биметаллической пластины закреплен, второй конец перемещается, размыкая одну пару контактов и замыкая другую. С помощью тепловых реле осуществляется и токовая защита различных электроустановок. В электротермических реле для токовой защиты используется тепловое действие электрического тока. Нагрев биметаллической пластины производится с помощью нагревательной спирали, по которой проходит ток. На рис. 19.8, б показана схема реле защиты электродвигателя от перегрева. Через нагревательную спираль 1 проходит ток одной из фаз цепи питания электродвигателя. Если нагрузка электродвигателя возрастает сверх допустимых пределов, ток в спирали / увеличивается, температура растет и биметаллическая пластина 2 изгибается влево, освобождая защелку спускового механизма 3. Это приводит к размыканию контактов 4 реле, которые находятся в цени питания аппаратуры включения электродвигателя. После остановки электродвигателя возврат контактов 4 реле и спускового механизма 3 в исходное положение выполняется вручную нажатием НА кнопку 5 после остывания биметаллической пластины. Но для повторного запуска электродвигатели этого недостаточно, необходима подача специального сигнала на аппаратуру включения электродвигателя. Биметаллические реле обладают большой инерционностью и не реагируют на большие, но кратковременные увеличения тока. Поэтому пусковые токи электродвигателя не приводят к срабатыванию теплового реле.
В некоторых реле используется не косвенный нагрев биметаллической пластины с помощью спирали, а прямой — пропусканием тока непосредственно через пластину. Основным недостатком биметаллических реле является низкая точность. Но благодаря простоте и низкой стоимости они получили преимущественное распространение. Из числа других электротермических реле следует упомянуть электроконтактные термометры, в которых контакты замыкаются столбиком ртути, по уровню которой можно одновременно определить значение истинной температуры. Точность электроконтактных термометров выше, чем у биметаллических. Известны также электротермические реле с расширяющимся газом. В таких реле газ при нагреве вытесняет ртуть, находящуюся на дне баллона, и тем самым разрывает контакт.
§ 19.7. Шаговые искатели и распределители
Шаговые искатели и распределители под действием управляющего сигнала осуществляют поочередное переключение нескольких исполнительных цепей. В простейшем случае шаговый искатель (рис. 19.9, а) имеет один входной зажим и несколько выходных. При подаче управляющего импульса в обмотку электромагнита (ЭМ) входной зажим перемещается на один шаг, соединяясь с очередным выходным зажимом. Следовательно, номер ламели, цепь возврата размыкается и ускоренное движение шаго вого механизма прекращается. С помощью шагово-декадных рас пределителей осуществляется, например, автоматическая телефон ная связь. Когда мы набираем номер вызываемого телефона, т< диск телефонного аппарата дает столько импульсов, до какой циф ры мы его повернули. При этом шагово-декадный распределител! произвел соединение с соответствующим выходным проводом и од новременно подключил очередную декаду ламелей (новый ря; из десяти ламелей).
В шаговых искателях разных типов число рядов ламелей может достигать 8, а число ламелей в ряду — 50. Все шаговые искатели рассчитаны на работу в импульсном режиме с частотой до 10 срабатываний в секунду.
§ 19.8. Магнитоуправляемые контакты. Типы и устройство
В обычных электромагнитных реле наиболее часто отказ возникает из-за контактов, которые подвергаются вредным воздействиям окружающей среды (окислению, загрязнению, коррозии и др.). Существенно повысить надежность реле можно за • счет герметизации контактов. Так как в этом случае невозможно механически связать контактный узел с электромагнитным приводом, то необходимо для перемещения герметизированных контактов использовать силы электромагнитного притяжения. Контактные пластины для этого изготовляются из ферромагнитного материала. Таким образом, контакты становятся магнитоуправ-ляемыми.
К магнитоуправляемым контактам относятся герконы (т. е. герметизированные контакты) и ферриды. Применяются они для тех же целей, что и мощные электромагнитные реле. Они и возникли в результате совершенствования контактных электромагнитных устройств и стремления свести к минимуму их недостатки: сравнительно небольшой срок службы (до 107 срабатываний), невысокое быстродействие (десятки миллисекунд), потребление энергии в течение всего периода притяжения якоря и необходимость периодического обслуживания.
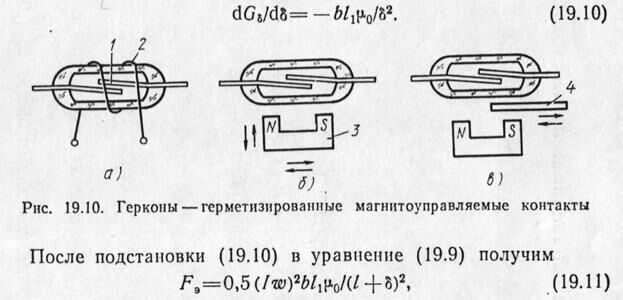
Геркон (рис. 19.10, а) представляет собой впаянные в стеклянную ампулу (баллон) пермаллоевые пластины /, служащие одновременно токоподводами, контактами и магнитопроводом. Пластины впаяны в ампулу таким образом, чтобы контакты, в качестве которых используются внутренние концы пластин, покрытые золотом, радием или вольфрамом, находились на некотором расстоянии друг от друга, т. е. были разомкнуты.
К наружным концам пластин припаивают провода, служащие для присоединения к внешней цепи. Если геркон поместить в магнитное поле, созданное током в обмотке 2, окружающей геркон, то на контакты будет действовать электромагнитная сила F3. Если эта сила окажется больше противодействующего усилия упругих пластин, то произойдет замыкание контактов.
Электромагнитная сила притяжения контактов определяется аналогично силе притяжения, действующей в любом другом электромагнитном механизме:
 |
Принимая зазор между пластинами плоскопараллельным, можно записать выражение для производной проводимости:
где / — ток в обмотке; w — число витков; / — длина обмотки; /i — перекрытие пластин; b — ширина пластин.
После отключения обмотки пластины под действием сил упругости возвращаются в исходное состояние, т. е. контакты размыкаются. Следовательно, удержать контакт в замкнутом состоянии можно только за счет потребления энергии от сети, что является одним из недостатков геркона. Герконы бывают вакуумные и газонаполненные, в которых стеклянная ампула заполнена азотом, водородом или другим инертным газом.
Для управления магнитоуправляемым контактом можно использовать не только магнитное поле катушки с током (рис. 19.10, а), но и магнитное поле постоянного магнита (рис. 19.10,6). В последнем случае срабатывание контактов осуществляется в зависимости от взаимного перемещения геркона и постоянного магнита 3. Изменение магнитного поля, воздействующего на контакты, может осуществляться и за счет изменения параметров магнитной цепи при перемещении ферромагнитного экрана 4 (рис. 19.10, в).
Большая часть управляющего магнитного потока во всех схемах герконов, изображенных на рис. 19.10, проходит по воздуху. Так как воздушные участки имеют значительное магнитное сопротивление.
§ 19.9. Применение магнитоуправляемых контактов
 На основе магнитоуправляемых контактов выпускаются высоконадежные промежуточные электромагнитные реле с числом контактных групп до десяти. В таких реле внутри общей катушки управления размещается несколько пар контактов (рис. 19.12). Как уже отмечалось, по сравнению с обычными электромагнитными реле герконовые имеют большее быстродействие и более надежны.
На основе магнитоуправляемых контактов выпускаются высоконадежные промежуточные электромагнитные реле с числом контактных групп до десяти. В таких реле внутри общей катушки управления размещается несколько пар контактов (рис. 19.12). Как уже отмечалось, по сравнению с обычными электромагнитными реле герконовые имеют большее быстродействие и более надежны.
Однако им свойственны и некоторые недостатки. Они имеют в 2—3 раза меньшие значения удельных токовых нагрузок на контакты, более критичны к переходным процессам в коммутируемой цепи. Например, при 3—5-кратном увеличении тока посравнению с номинальным возможно сваривание контактов. В цепях с конденсаторами возможны значительные броски тока, поэтому применение герконовых реле для коммутации таких цепей не рекомендуется. Необходимо отметить и характерный для герконовых реле недостаток — вибрация контактов при срабатывании. Это явление называется «дребезг» контактов.
Информация в лекции "Система и типология современных зарубежных СМИ" поможет Вам.
После подачи управляющего сигнала контакты сначала замыкаются, но тут же размыкаются под действием сил упругости. Таких циклов замыкания-размыкания может быть несколько. Затем происходит несколько колебаний контактов без размыкания; при этом происходит изменение контактного сопротивления.
Время вибрации контактов может составлять половину полного времени срабатывания. Для борьбы с «дребезгом» контактов применяют специальные конструктивные и схемные решения.
На основе магнитоуправляемых контактов могут быть построены различные путевые и конечные выключатели, реле различных неэлектрических величин. В качестве примера на рис. 19.13 показаны термоэлектрические реле (а) с биметаллической пластиной и реле давления (б) с упругим элементом в виде сильфона
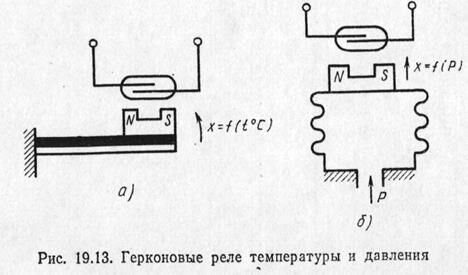 |
гофрированного упругого стакана из фосфористой бронзы). При изменении температуры или давления постоянный магнит приближается к геркону и его контакты срабатывают.
Магиитоуправляемые контакты специальной конструкции начинают применяться и для переключений в силовых цепях с мощностью до нескольких сотен ватт. В таких устройствах используется более массивный жесткий подвижный контактный сердечник, закрепленный на возвратной пружине. При этом за счет снижения электрического сопротивления контактной системы и улучшения теплоотдачи удается повысить ток через контакты. Для этих же целей возможно применение жидкометаллических герметизированных контактов, внутри герметизированного баллона которых токопроводящие детали частично или полностью смочены ртутью.



















