
Постановка задачи синтеза самонастраивающихся систем
Постановка задачи синтеза самонастраивающихся систем
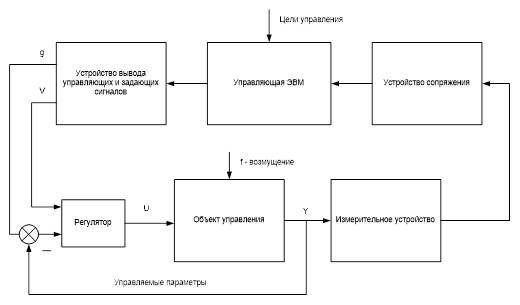
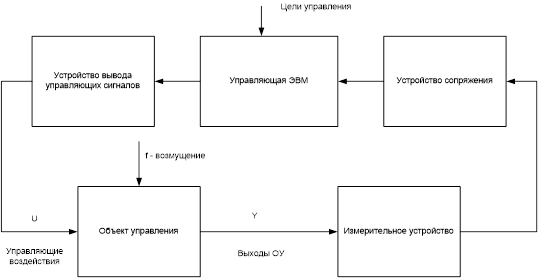
Рассмотрим две схемы адаптивного управления:
- схема 1 - “ЭВМ + РГ + ОУ”:
- схема 2 - “ЭВМ + ОУ ” :
Введем в рассмотрение вектора:
- p - вектор параметров ОУ;
- х - вектор перенастраиваемых параметров регулятора;
- V - вектор управляющих воздействий на регулятор;
Рекомендуемые материалы
- U - вектор управляющих воздействий на ОУ;
- g - вектор задающих воздействий;
- f - вектор возмущающих воздействий.
Считаем значения векторов p, g, f нестационарными. В качестве самонастраивающейся системы управления будем рассматривать такую, которая вырабатывает управляющее воздействие на нестационарный объект при нестационарности задающих и возмущающих воздействий, обеспечивая цель и качество управления.
Задача синтеза самонастраивающейся системы управления с ЭВМ и регулятором в контуре управления может быть сформулированна следующим образом. Для заданного объекта управления передаточной матрицей WОУ(p,s), отдельные или все коэффициенты которой являются переменными, необходимо определить структуру системы управления и закон x (tm) = x (p, r, f, tm) изменения вектора настраиваемых параметров регулятора в зависимости от изменения во времени p, r, f , кроме того, требуется сформировать закон

который будет обеспечивать требуемые показатели качества функционирования системы во времени.
Задача синтеза системы управления с ЭВМ в контуре управления, на которую возлагаются все функции управления, может быть сформулированна следующим образом. Для заданного объекта управления матрицей WОУ(p,s) необходимо определить закон
 .
.
выработки управляющих воздействий на объект управления, который при вариации во времени p, g, f будет обеспечивать требуемые показатели качества управления объектом во времени.
Процедура синтеза закона управления
Пусть структура системы управления уже выбрана или известна. В зависимости от типа синтезируемой системы управления с автоматическим регулятором или без него в контуре управления нужно различать и задачи синтеза управлений. Рассмотрим процедуру синтеза вектора V. Для того чтобы воспользоваться рассмотренными ранее положениями нужно перейти от математической модели непрерывной системы управления к модели непрерывно дискретной, квазистационарной, то есть такой модели, которая в дискретно малые интервалы времени t может быть представлена системой уравнений вида:
t может быть представлена системой уравнений вида:
| Y (g, х, p, f, s) = WI (х, p, s) g (s) + WII (х, p, s) f (s) | (4.1) |
При нахождении вектора х в момент tм решение будет искаться в интервалеt. Для этого необходимо задать эталоную систему управления через расположение полюсов и нулей. Синтезируемый закон управления должен отвечать за формирование в интервале t математической модели максимально приближенной к эталоной. Тогда из решения расчетной системы уравнений определяются искомые зависимости
| х = х (p, g, f). | (4.2) |
Рассмотрим формирование целевой функции. Моделирование процессов в комплексной области позволяет выбрать в качестве целевой функции функцию вида:

| F (x, f, p, g) ® min. | (4.3) |
Здесь через  обозначено заданное значение управляемой величины Yi на
обозначено заданное значение управляемой величины Yi на
i-ом выходе объекта управления в установившемся режиме, через  обозначены весовые коэффициенты, назначение которых разделять каналы управления по степени значимости. Минимизация F будет проводиться по переменным вектора х. Это позволит в дискретные моменты времени
обозначены весовые коэффициенты, назначение которых разделять каналы управления по степени значимости. Минимизация F будет проводиться по переменным вектора х. Это позволит в дискретные моменты времени
tm = tm-1 +t по измеренным или оцененным значениям p, f, g находить
х(tm ) из расчетной системы уравнений. Предполагается, что реализации p(tm) определяются прямо (с датчиков) или косвенно (с помощью оценок), реализации g(tm), относящиеся к задающим воздействиям, поступают от ЭВМ в моменты времени tm в соответствии с целями управления. Значения вектора возмущений f(tm) учитываются в том случае, если места приложения таких воздействий известны, а их величины могут быть измерены или оценены. Отметим, что при синтезе закона управления нужно стремиться к получению линейных алгебраических зависимостей, что обеспечит наиболее простое, а значит и более эффективное управление объектом. Линейные зависимости могут быть получены путем рационального синтеза структуры регулятора
(аналитического конструирования регулятора). Полученные зависимости:
х(tm) = х (p, f, g, tm) позволят формировать вектор управляющих воздействий
| V (tm) = х (tm) - х(tm-1), | (4.4) |
направленый на изменение параметров регулятора. Перенастройка параметров х осуществляется с помощью исполнительных устройств.
Перейдем к рассмотрению синтеза закона управления для второй схемы. Отметим, что, несмотря на исключение регулятора из контура управления, его формальное присутствие остается в математической модели системы управления. Работу регулятора в данном случае берет на себя ЭВМ. При этом характеристики модели регулятора будут влиять на выработку управляющих воздействий U. Обратимся к схеме и найдем выражение, определяющее вектор Y, параметр s у функций опущен для лучшей наглядности.
| Y = | (4.5) |

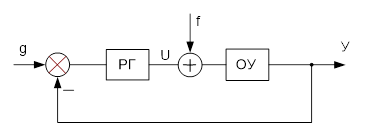
Выразим U посредством g и f. Для этого вначале положим сигнал f = 0. Тогда, как это наглядно видно из схемы, можно записать:
 .
.
Далее положим сигнал g = 0, и найдем связь U с f , будем иметь:
Рекомендация для Вас - Техническое обучение и аттестация работников.
 .
.
В соответствии с принципом суперпозиции можно записать:
|
| (4.6) |
 .
.Несмотря на сложность выражений (4.5) - (4.6) окончательные формулы при решении задач намного проще после подстановки значений p, g , f, x в момент времени tm. Законы управления (4.4) и (4.6) позволяют на дискретных интервалах времени t с помощью ЭВМ определять управляющие воздействия, обеспечивающие заданные требования к управлению в виде выполнения условий (3.8) и (3.9). Учет требований (3.8) и (3.9) закладывается при формировании обобщенного функционала качества (4.3), минимизация которого составляет основу формирования закона управления.


















