
Синтез комплексного закона управления электроприводом с нечеткой логикой
Синтез комплексного закона управления электроприводом постоянного тока с помощью нечеткой логики.
На практике бывает довольно сложно синтезировать оптимальный более чем по одному критерию закон управления. Не лишены этого недостатка и нечеткие регуляторы. Из вышеприведенных исследований видно, что ни один из синтезированных законов управления не удовлетворяет одновременно требованиям по быстродействию и точности, поэтому для управления сложными динамическими системами целесообразно использовать комплексное управление, сочетающее в себе достоинства нескольких законов управления.
Сочетание нескольких законов управления возможно различными методами, которые тоже, к сожалению, не лишены недостатков. При переключении с одного режима управления на другой могут возникать нежелательные колебания и скользящие режимы. Чтобы избежать этого, кривая переключения по возможности должна содержать как можно меньше разрывов, а в идеальном случае, вообще должна быть гладкой. Добиться гладкой формы кривой переключения классическими методами довольно сложно. Поэтому применение методов нечеткой логики для этих целей является вполне обоснованным.
Проверим это сначала на объекте четвертого порядка – уже использовавшемся ранее электроприводе постоянного тока. Так как объект является довольно простым, синтез быстродействующего и точного закона управления не составит особого труда. Для этого воспользуемся стандартными средствами оптимизации пакета MatLab. Используем toolbox NCD Blockset. Этот toolbox позволяет производить так называемый комплексный синтез САУ. Элемент этого toolbox – NCD Outport позволяет довольно просто провести оптимизацию.
В меню Optimization – > Parameters…, мы имеем возможность выбрать те параметры системы, изменяя которые будем добиваться нужного, а также точность производимых вычислений.

Рис. 31 Меню Optimization Parameters блока NCD Blockset
В меню Options – > Y-Axis… исходя из требований задания, задаём диапазон изменения выходной координаты.


Рекомендуемые материалы
Рис.32 Меню Response Axis Limits блока Рис.33 Меню Time Axis Limits
NCD Blockset . NCD Blockset.
В меню Options – > Time Range… определяем промежуток времени синтеза.
Настройка быстродействующего регулятора.
Структурная схема быстродействующего регулятора представлена ниже. Так как точность регулятора не имеет особого значения, то целесообразно его сделать релейным.

Рис.34. Структурная схема быстродействующего регулятора.
Оптимизацию точного закона управления будем проводить по двум параметрам: коэффициенту усиления всей системы  и коэффициенту обратной связи по скорости
и коэффициенту обратной связи по скорости  .
.
Сначала необходимо подать на вход NCD Outport оптимизируемую величину (в нашем случае – координату положения вала двигателя).

Рис.35. Схема модели для оптимизации быстродействующего закона управления.
Зная предъявляемые к системе требования, ограничим область, в которой может располагаться график зависимости регулируемой величины от времени. Оптимизацию будем производить при единичном ступенчатом входном сигнале. Положение верхней границы не имеет особо важного значения, поэтому примем её на 200% больше от величины входного сигнала, крайняя правая – жестко задана временем регулирования, которое не должно превышать полторы секунды. Т.е. в течение полутора секунд в системе допускаются переходные процессы с очень большим перерегулированием. И движение считается установившимся при попадании величины ошибки в заданный коридор -  .
.

Рис.36. Задание требований к системе(быстродействующий закон управления)
Определение границ может производиться как с помощью мышки, так и введением конкретных значений с клавиатуры в указанных выше меню. Далее задаем величины, по которым будет проводиться оптимизация:  и
и  . Выбираем шаг и запускаем.
. Выбираем шаг и запускаем.
Система анализирует множество всех точек, расположенных в заданной области и посредством последовательного перебора значений искомых параметров с заданным шагом ищет оптимальную их комбинацию, при которой система удовлетворяет предъявленным требованиям, т.е. график зависимости регулируемой величины от времени не выходит за границы указанной области. Если не удается найти именно такие величины, то выдаются предельные значения параметров, при которых система близка к оптимальной и строится график при этих значениях.
В результате поиска было получено что, система почти удовлетворяет предъявленным требованиям при коэффициенте усиления Ку =0.1452 и коэффициенте обратной связи по скорости Кос=0.0552.

Рис.37. Переходный процесс в системе с быстродействующим регулятором.
2.3. Настройка точного регулятора.
Теперь необходимо синтезировать точный закон управления. Для этого воспользуемся теми же методами и средой Matlab. Структуру точного регулятора попробуем немного изменить. Исключим из неё релейный элемент и добавим коэффициент усиления по контуру.

Рис.38. Структурная схема точного регулятора.
Оптимизацию будем проводить, используя не выходную координату с вала двигателя, а величину ошибки по положению, т.к. в данном случае нас интересует исключительно точность. Оптимизировать будем три параметра: коэффициент усиления всей системы , коэффициент обратной связи по скорости и коэффицент усиления по контуру  .
.
Подадим на вход NCD Outport оптимизируемую величину (величина ошибки по положению ).

Рис.39. Схема модели для оптимизации точного закона управления.
Исходя из предъявляемых к системе требований, ограничим область, в которой может располагаться график зависимости регулируемой величины от времени. Оптимизацию будем производить при гармоническом входном сигнале, т.к. он наиболее трудно поддается точному слежению. Верхнюю и нижнюю границы области переходных процессов считаем обусловленной максимальным значением входного сигнала плюс 40% запаса с каждой стороны, крайняя правая – задана временем регулирования, которое не должно превышать шести секунд. Т. е. в течение шести секунд в системе допускаются переходные процессы, т.к. быстродействие данного регулятора не является основной характеристикой. И движение считается установившимся при попадании величины ошибки в заданный коридор -  .
.

Рис.40. Задание требований к системе(точный закон регулирования)
В результате поиска было получены следующие коэффиценты: коэффициент усиления Ку= 34.15, коэффициент обратной связи по скорости Кос= 20.97 и коэффициент по контуру Кк= 98.24 . Но величина амплитуды ошибки все равно превышает границы коридора, а также наблюдается слишком большая колебательность установившегося процесса. Поэтому необходимо использовать дополнительные способы повышения точности.

Рис.41. Ошибка слежения после оптимизации в NCD Blockset (точный закон управления).
Повышение точности
Оптимизация существенно улучшила характеристики системы. Но даже при оптимальном выборе коэффициентов усиления и обратной связи система не удовлетворяет заданным требованиям по точности. Уменьшим ошибку слежения до допустимой посредством добавления к входному сигналу его производной.
Рассмотрим произвольную замкнутую систему с единичной обратной связью. Пусть имеет место случай, когда на вход системы подается линейно-нарастающий сигнал f=vt , v=const. Тогда  и изображение сигнала ошибки ∆x(t) имеет вид:
и изображение сигнала ошибки ∆x(t) имеет вид:
 . Примем, что возмущающее воздействие в системе отсутствует, тогда:
. Примем, что возмущающее воздействие в системе отсутствует, тогда:

В нашем случае передаточная функция Wp(p) имеет астатизм 1-ог порядка, и может быть представлена виде:
 ,
,
и при этом W*(0)=1. Тогда в соответствии с теоремой о предельном значении:
 ()
()
Из () видно, что величина е установившейся ошибки пропорциональна скорости изменения задающего воздействия (его производной) и обратного пропорциональна коэффициенту передачи разомкнутой системы К.
Таким образом, чтобы избавится от установившейся ошибки, необходимо на вход системы подать сигнал пропорциональный производной входного сигнала  . Коэффициент
. Коэффициент  подбирается в зависимости от структуры системы и приблизительно равен
подбирается в зависимости от структуры системы и приблизительно равен  , где K – коэффициент разомкнутой системы. Моделирование в среде MatLab показывает, что такой метод повышения точности вполне оправдан.
, где K – коэффициент разомкнутой системы. Моделирование в среде MatLab показывает, что такой метод повышения точности вполне оправдан.
Продолжая рассуждения нетрудно предположить, что ошибка при гармоническом воздействии будет уменьшена до допустимого значения аналогичным образом. Чтобы вычислить коэффициент пропорциональности , разложим производную входного сигнала в ряд Тейлора:  …
…
Ограничимся первыми гармониками разложения: . Откуда может быть вычислен соответствующий коэффициент . В нашем случае
. Откуда может быть вычислен соответствующий коэффициент . В нашем случае  . После этого проведем окончательную оптимизацию в NCD Blockset по всем четырем параметрам: Ку, Кос, Кк, k1. В результате получаем следующие значения коэффициентов: Ку= 170.77, Кос= 20.97, Кк= 9.82, k1= 21.05. После моделирования в среде Matlab, получаем следующие результаты.
. После этого проведем окончательную оптимизацию в NCD Blockset по всем четырем параметрам: Ку, Кос, Кк, k1. В результате получаем следующие значения коэффициентов: Ку= 170.77, Кос= 20.97, Кк= 9.82, k1= 21.05. После моделирования в среде Matlab, получаем следующие результаты.
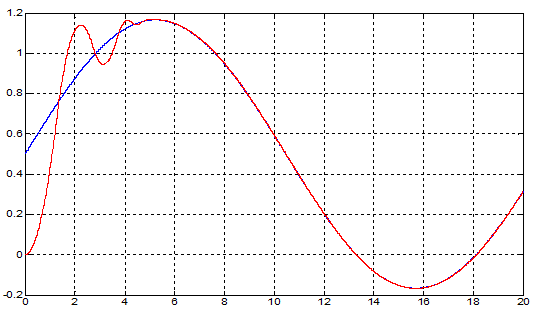
Рис.42. Переходный процесс после оптимизации коэффициентом при производной
(точный закон управления).
Из графиков видно, что данный закон управления обеспечивает необходимую точность слежения, но имеет колебательный переходный процесс.
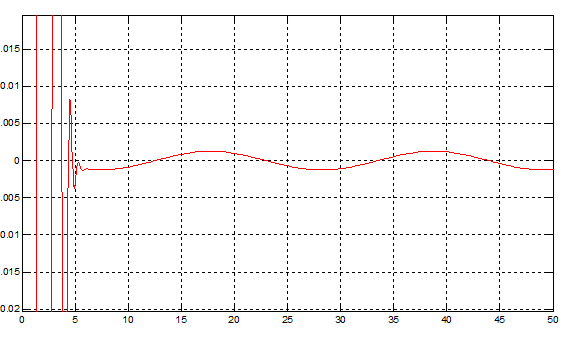
Рис.43 Ошибка слежения после оптимизации коэффициентом при производной
(точный закон управления).
Синтез комбинированного управления
Принципиальная схема нечеткого регулятора, осуществляющего комбинированное управление электроприводом представлена на рис.44.
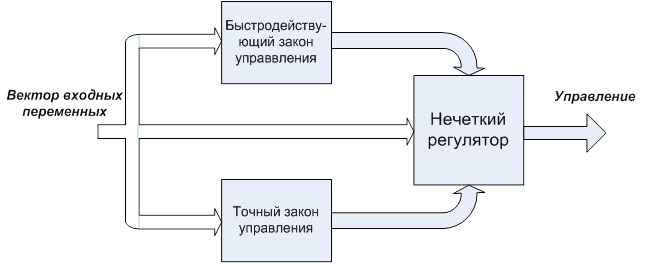
Рис.44. Принципиальная схема регулятора.
На вход регулятора поступает вектор входных переменных: величина ошибки слежения, скорость и значение производной входного сигнала. Величина ошибки является основным критерием выбора закона регулирования. Пока значение ошибки по положению велико работает быстродействующий закон управления, а когда положение вала двигателя оказывается близким к требуемым значениям, происходит плавное переключение на точный закон слежения. Основное назначение нечеткого регулятора – обеспечить как можно более плавный переход от одного закона управления к другому. Как уже говорилось выше, обеспечить такой переход классическими средствами не всегда возможно или, как правило, связано со значительными как вычислительными, так и техническими трудностями. В большинстве случаев в моменты переключения между законами управления в системе возникают различные нежелательные колебания, а также скользящие режимы, что крайне снижает показатели качества управления.
Фактически регулятор должен воспроизводить зависимость вида:
 , где
, где
 - управление с выхода быстродействующего регулятора;
- управление с выхода быстродействующего регулятора;
 - управление с выхода регулятора, отрабатывающего точный закон управления;
- управление с выхода регулятора, отрабатывающего точный закон управления;
 - результирующее значение управления;
- результирующее значение управления;
 - коэффициент влияния на законы управления, который должен быть гладкой непрерывной функцией вектора входных переменных
- коэффициент влияния на законы управления, который должен быть гладкой непрерывной функцией вектора входных переменных  .
.

Рис.45. Структурная схема регулятора.
Структурная схема регулятора в среде Matlab состоит из пяти блоков: «Precision» - блок формирования точного закона слежения, «Fast» - формирователь быстродействующего закона, «Razdelitel» - блок, выделяющий из вектора входных переменных, необходимые для получения функции . Функция формируется нечетким контроллером в блоке «Fuzzy Logic Controller» и поступает на вход VS блока «FormUpr» вместе с сигналами управления с регуляторов «Fast» и «Precision». Блок «FormUpr» обеспечивает непосредственную реализацию зависимости . Остановимся на нем чуть подробнее.

Рис.46. Структурная схема блока «FormUpr».
Нечеткий контроллер настроен таким образом, что функция может принимать значения только из интервала [0; 1]. Поэтому при больших значениях сигнала ошибки по положению на его выходе должна быть 1, а при точном слежении за входным сигналом – 0. Структура реализующая зависимость легко организуется с помощью двух умножителей и сумматоров и изображена на рис..
Из структурных схем регулятора видно, что во время работы системы задействованы одновременно оба закона управления, но доля их взаимного участия в процессе регулирования определяется нечеткой функцией .
Нечеткая функция состоит из двух лингвистических переменных: «ошибка слежения» и «коэффициент альфа», представленных рис. и таблицей.
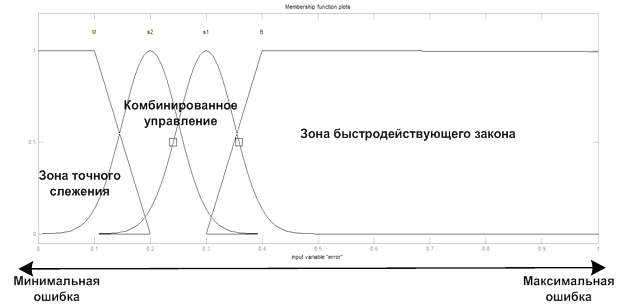
Рис.47. Лингвистическая переменная «Ошибка».
Лингвистическая переменная «коэффициент альфа»: Таблица 5
| Функции принадлежности | Единичный B | Средний 1 S2 | Средний 2 S1 | Нулевой M |
| Коэффициент альфа | 1 | 0.65 | 0.35 | 0 |
Параметры функций принадлежности выбирались достаточно произвольно, так как нет жестких правил, регламентирующих их выбор. Поэтому можно смело предположить, что работа нечеткого контроллера будет далека от оптимальной. Проведем оптимизацию параметров функции принадлежности с помощью генетических алгоритмов рассмотренными выше методами. Для этого по-прежнему будем использовать среду Matlab и редактор AnfisEdit. В качестве обучающей выборки возьмем следующую таблицу значений: Таблица 6
| Значение ошибки | 2 | 1.5 | 1 | 0.9 | 0.8 | 0.7 | 0.6 | 0.5 | 0.4 | 0.3 | 0.2 | 0.1 | 0.09 | 0.08 | 0.07 | 0.06 | 0.05 | 0.04 | 0.03 |
| Значение α | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0.9 | 0.8 | 0.7 | 0.6 | 0.5 | 0.4 | 0.2 | 0.1 | 0 | 0 |
Фактически нечеткий контроллер должен отрабатывать функцию, график которой изображен на рис. Разница между обычной функцией одной или нескольких переменных и нечеткой функцией заключается в том, что нечеткая функция не является однозначной, она зависит не от значений своих аргументов, а от оценок состояния входных величин. Поэтому невозможно описать жесткими математическими зависимостями физическую модель нечеткого контроллера. В этом и состоит его уникальность. Особенностью нейросети является именно то, что любой из её входов в разные моменты времени может быть охарактеризован различным состоянием сети, но это никак не отразится на общем её состоянии.

Рис.48. Характеристика обучающей выборки (желаемая характеристика).
Оптимизацию и обучение нейросети будет проводить методом обратного распространения ошибки на 100 шагах. Этого более чем достаточно для модели сети такой сложности. Как видно из графика сходимости поиск сходится уже на 12 шаге с вполне допустимой точностью.


Рис.49. Вид обучающей выборки и процесс обучения нейросети
Исследовав состояния лингвистических переменных можно даже невооруженным глазом заметить как нейросеть «поправила» параметры функций принадлежности. На рис. Изображены функции принадлежности лингвистической переменной «Ошибка» в исходном состоянии и после оптимизации нейросетью. Параметры лингвистической переменной «Коэффициент альфа» тоже изменились (См. Таблицу 7)


Рис.50 Лингвистическая переменная «Ошибка» до и после оптимизации нейросетью.
Таблица 7
| Функции принадлежности | Единичный B | Средний 1 S2 | Средний 2 S1 | Нулевой M |
| Коэффициент альфа | 1.001 | 1.927 | 0.9112 | -0.01456 |
Промоделируем систему с комбинированным законом управления и нейронечетким контроллером в среде Matlab.

Рис.51. Структурная схема модели с нейронечетким контроллером.

Рис.52 Переходный процесс в системе с комбинированным управлениеми и нейронечетким регулятором при гармоническом входном сигнале
Информация в лекции "Арифметика в дополнительном коде и двоичные операции" поможет Вам.
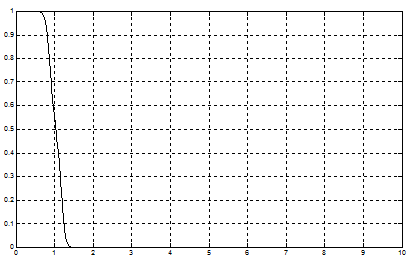
Рис.53 Характеристика величины  на выходе нечеткого контроллера при гармоническом входном сигнале
на выходе нечеткого контроллера при гармоническом входном сигнале
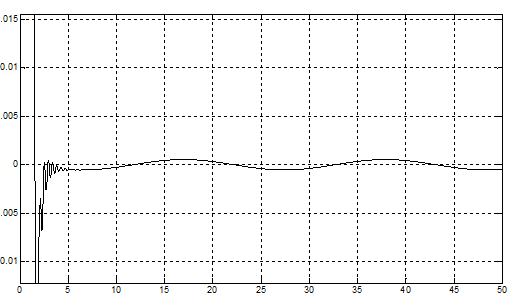
Рис.54 Ошибка слежения в системе с комбинированным управлениеми и нейронечетким регулятором при гармоническом входном сигнале
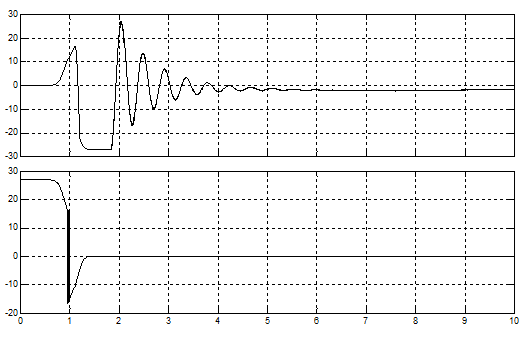
Рис.55 Сигналы управления с точного и быстродействующего регуляторов в системе с комбинированным управлениеми и нейронечетким регулятором при гармоническом входном сигнале


















