
Лекция 21 - Синтез цифровых САУ с цифровыми регуляторами
Лекция 21.
Синтез цифровых САУ с цифровыми регуляторами.
План лекции.
1. Синтез цифровых САУ с цифровыми регуляторами.
2. Некоторые вопросы реализации импульсных фильтров.
3. Реализация цифровых регуляторов в виде импульсных фильтров.
4. Реализация цифровых регуляторов на микроЭВМ.
1. Синтез цифровых САУ с цифровыми регуляторами.
Рассмотрим применение частотного метода синтеза цифровой САУ с цифровым регулятором. По сравнению с аналоговым регулятором, цифровой регулятор в состоянии обеспечить лучшее качество управления.
Рекомендуемые материалы
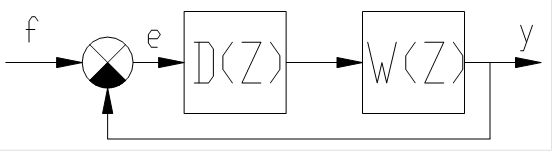 |
Другое их преимущество состоит в том, что алгоритм управления может быть легко изменен заменой программы. Структурная схема системы приведена на рисунке:
рис. 50
Задача синтеза САУ с цифровым регулятором решается проще, чем задача с аналоговым регулятором, так как передаточная функция регулятора и неизменяемой части разделены ИИЭ и эффект введения регулятора непосредственно учитывается с помощью ЛАФПЧХ. Можно сформулировать основные этапы синтеза:
1. Находим передаточную функцию системы без коррекции

2. Полагая W=jl , строят ЛАФЧХ для функции W*(w)
При необходимости эти характкристики переносят на номограмму замыкания. По этим кривым определяют показатели качества нескорректированой системы: запасы устойчивости по модулю и фазе, полосу пропускания, показатель колебательности, резонансную частоту, точностные показатели.
3. Если необходима коррекция, то передаточная функция системы с цифровым регулятором в прямой цепи будет иметь вид Wск(w)=D*(w)W*(w) Передаточная функция цифрового регулятора должна быть такой, чтобы удовлетворялись все требования к качеству системы. При выборе D*(w) (при построении желаемой ЧХ) исходят из тех же соображений, что и в случае аналоговой коррекции.
4. При известной W-передаточной функции цифрового регулятора D*(w) находим Z-передаточную функцию:
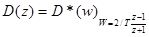
Заключительный этап синтеза состоит в реализации Z-передаточной функции D(z) цифрового регулятора.
2. Некоторые вопросы реализации импульсных фильтров.
Существует множество способов реализации цифрового регулятора. Он может представлять собой пассивный RC-фильтр, расположенный между двумя устройствами выборки и хранения. Возможна также реализация цифрового регулятора на основе микроЭВМ. В этом случае необходимо учитывать имеющиеся ограничения на быстродействие ЭВМ и ее объем памяти.
При синтезе цифрового регулятора требуется прежде всего, чтобы передаточная функция регулятора D(z) была физически реализуемой.
Пусть D(z)-дробно-рациональная функция
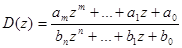
Соответствующее разностное уравнение имеет вид:

Здесь “x”-выходная, “е”-входная переменные цифрового регулятора. В физически реализуемом устройстве входной сигнал в настоящий момент определяется:
— своими прошлыми значениями
— прошлым и настоящим значением входного сигнала и он не может зависить от будущих значений входа.
Таким образом, m<=n и не может быть m>n , так как при этом выходной сигнал опережает входной.
3. Реализация цифровых регуляторов в виде импульсных фильтров.
Импульсный фильтр — это четырехполюсник, расположенный между двумя устройствами выборки и хранения (ИЭ с экстраполятором нулевого порядка). Мы ограничимся рассмотрением наиболее простого последовательного импульсного фильтра.
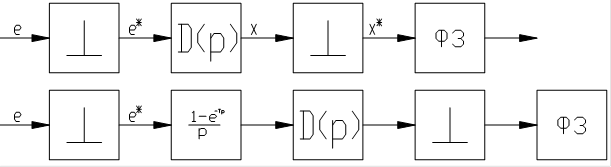 |
рис.51
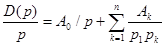
имеем

и тогда
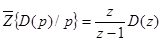
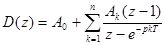
Это соотношение позволяет найти предаточную функцию последовательного фильтра на заданной Z-передаточнгой функции цифрового регулятора D(z). Если импульсный фильтр реализуется в виде RC-четырехполюсника, то полюсы р1,р2,...,рn должны быть простыми, действительными, отрицательными. Нули D(p) могут быть произвольными. Пусть
р1...рn- простые действительные отрицательные числа
Тогда

откуда
Для соответствия D(p) RC-четырехполюснику необходимо, чтобы:
— число полюсов D(z) было не меньше числа нулей этой функции
— нули D(z) могут быть произвольными
— полюсы D(z) должны быть действительными, положительными и большими единицы.
Возможна реализация цифрового регулятора в виде импульсного фильтра в цепи обратной связи, схемы комбинированого типа. Каждая из таких схем имеет свои условия физической реализуемости.
4. Реализация цифровых регуляторов на микроЭВМ.
Это наиболее универсальный способ. Передаточная функция регулятора может быть реализована в виде программы для ЭВМ. Известны три основных метода программирования : прямое, параллельное и последовательное. С аналитической точки зрения они непосредственно связаны с методами выборо переменных состояния. По существу, при использовании какого-либо из этих способов мы соответствующим способом получаем совокупность уравнений состояния и уравнение для выходной переменной и далее составляем алгоритм решения данных уравнений на ЭВМ. Таким образом, каждый из этих способов программирования отличается системой уравнений, решаемой на ЭВМ.
Рассмотрим передаточную функцию цифрового регулятора. Расчет на ЭВМ ведется в реальном времени. При m<n значение x[kT] определяется прошлыми значениями х и прошлыми значениями е. При этом быстродействие ЭВМ долно быть таким, чтобы за время Т выполнить все необходимые расчеты. При m=n быстродействие ЭВМ должно обеспечивать расчет за время, пренебрежимо малое с величиной Т или необходимо учитывать величину запаздывания, вносимую ЭВМ.
Пример:
имеем систему
 |
рис.52
пусть
Необходимо синтезировать цифровой регулятор с учетом следующих требований:
— устоновившаяся ошибка при отработке сигнала f(t)=t Eуст<=0.33
— запас по фазе >= 50
— показатель колебательности М<=1.3
Z-передаточная функция разомкнутой САУ без коррекции имеет вид :

В нескорректированой системе в установившемся режиме имеем:
f(t)=t;
y(t)=t-A А*К=1 и следовательно А=1/К
Eуст=А А<0.33 и тогда К>=3
На рис. 52 представлены ХПЧХ данной передаточной функции.
Из характеристик видно, что при К=3 система без коррекции находится практически на границе устойчивости. Запасы почти нулевые. Можно показать, что Ккр=3.3; для обеспечения запаса устойчивости по фазе 50 при сохранении коэффициента К=3 предлагается использовать регулятор с отставанием по фазе. Регулятор с опережением фазы (ИДФ с преобладанием дифференцирования в данном случае будет неэффективен из-за резкого завала фазы в районе -180)
Выберем D*(w) в виде
Для получения запаса =50 частоту среза нужно сдвинуть из (.) l=2.4 в точку l=0.8 при условии, что регуляторD*(w) не окажет на новой частоте среза существенного влияния на ФЧХ. ЛАФЧХ показывает, что Н*(0.8)=12дб. Следовательно D*(w) на частоте 0.8 должен вносить ослабление -12дб. Из этих соображений находим “а”
20lg a=-12 дб; a=0.25;
Чтобы фазовая характеристика D*(w) не влияла на фазовый сдвиг САУ при l=0.8 выберем частоту, соответствующую правому излому D*(w) на декаду меньше значения 0.8 , таким образом
1/at=0.08 и 1/t=0.02
W-передаточная функция цифрового регулятора принемает вид:
ЛАФЧХ скорректированой системы представлены на рисунке 52. Теперь

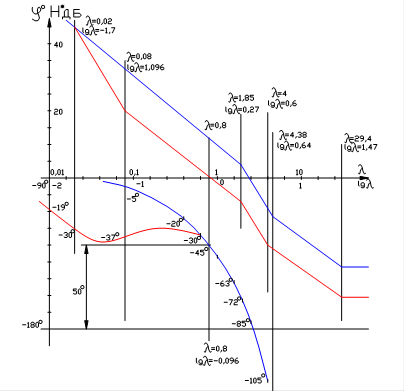 |
Рис. 52.
Если перенести ЛАФПЧХ на номограмму замыкания, то можно видеть, что ранее М было практически бесконечным, в скорректированой САУ М=1.2
Передаточная функция D(z) получается подстановкой в D*(w)
"2. Составление родословной" - тут тоже много полезного для Вас.
Чтобы убедиться в правильности решения задачи синтеза запишем передаточную функцию замкнутой системы

Переходная характеристика представлена на рисунке:
 |
рис.53
Заключительный этап синтеза включает в себя реализацию D(z) каким-либо из рассмотренных способов.


















