Курсовая работа: Курсовой гироскоп
Описание
Задание
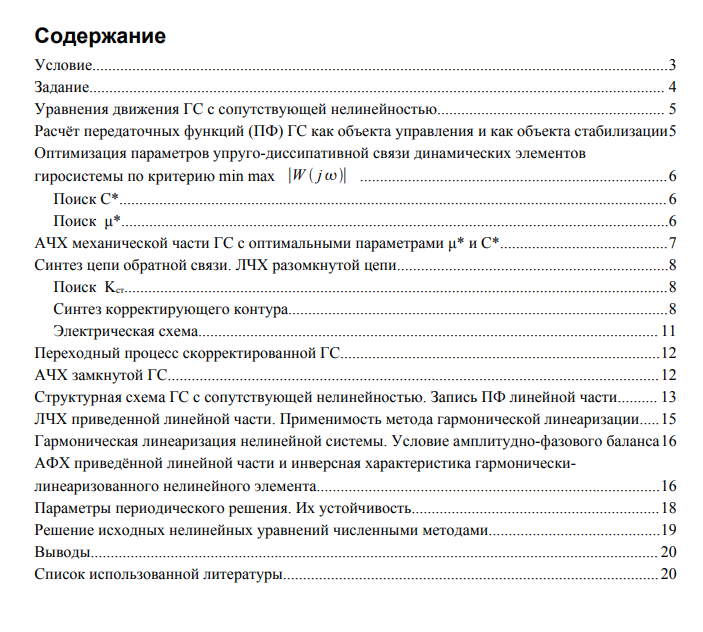
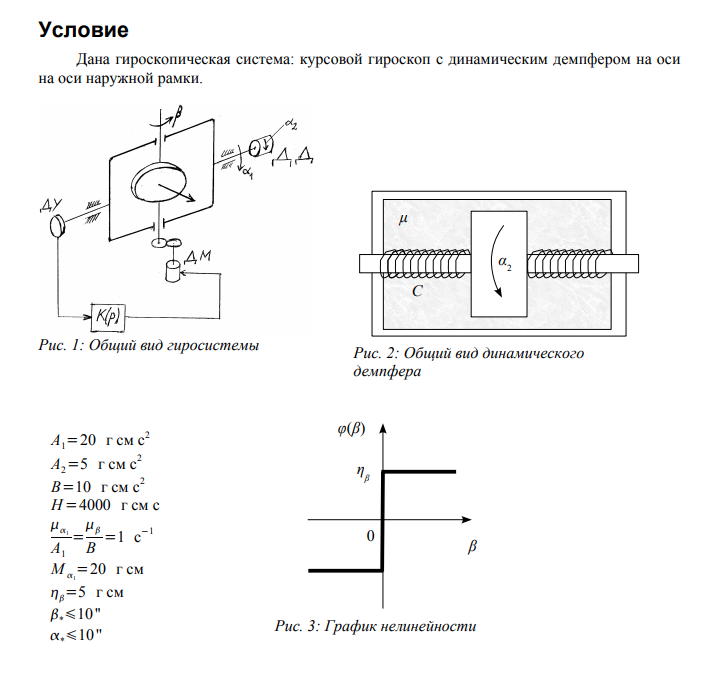
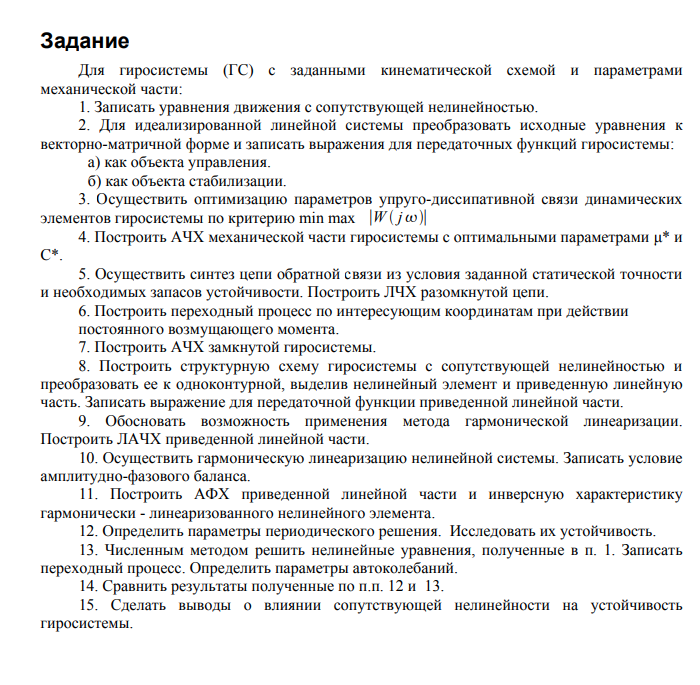
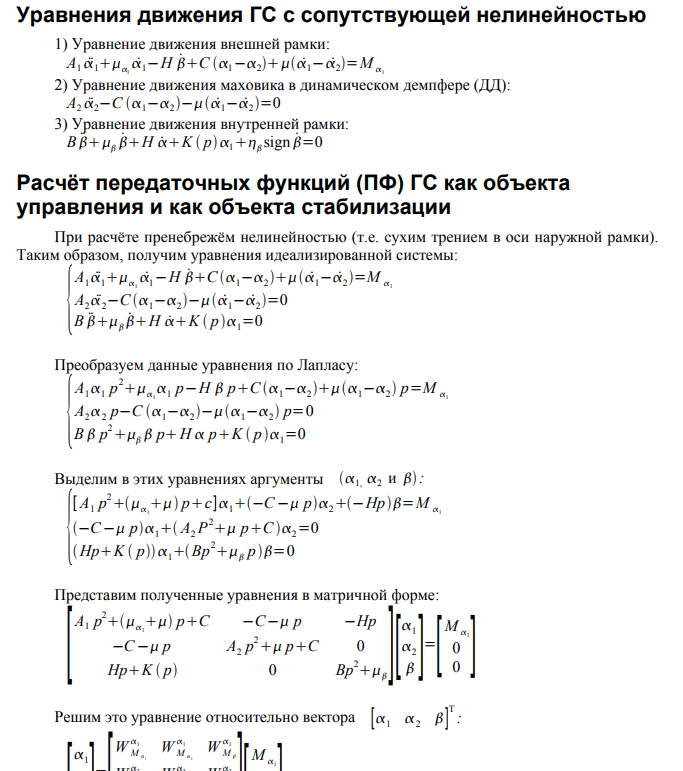
Для гиросистемы (ГС) с заданными кинематической схемой и параметрами механической части: 1. Записать уравнения движения с сопутствующей нелинейностью. 2. Для идеализированной линейной системы преобразовать исходные уравнения к векторно-матричной форме и записать выражения для передаточных функций гиросистемы: а) как объекта управления. б) как объекта стабилизации. 3. Осуществить оптимизацию параметров упруго-диссипативной связи динамических элементов гиросистемы по критерию min max ∣W j ∣ 4. Построить АЧХ механической части гиросистемы с оптимальными параметрами μ* и C*. 5. Осуществить синтез цепи обратной связи из условия заданной статической точности и необходимых запасов устойчивости. Построить ЛЧХ разомкнутой цепи. 6. Построить переходный процесс по интересующим координатам при действии постоянного возмущающего момента. 7. Построить АЧХ замкнутой гиросистемы. 8. Построить структурную схему гиросистемы с сопутствующей нелинейностью и преобразовать ее к одноконтурной, выделив нелинейный элемент и приведенную линейную часть. Записать выражение для передаточной функции приведенной линейной части. 9. Обосновать возможность применения метода гармонической линеаризации. Построить ЛАЧХ приведенной линейной части. 10. Осуществить гармоническую линеаризацию нелинейной системы. Записать условие амплитудно-фазового баланса. 11. Построить АФХ приведенной линейной части и инверсную характеристику гармонически - линеаризованного нелинейного элемента. 12. Определить параметры периодического решения. Исследовать их устойчивость. 13. Численным методом решить нелинейные уравнения, полученные в п. 1. Записать переходный процесс. Определить параметры автоколебаний. 14. Сравнить результаты полученные по п.п. 12 и 13. 15. Сделать выводы о влиянии сопутствующей нелинейности на устойчивость гиросистемы.
![]()
![]()
![]()
![]()
Для гиросистемы (ГС) с заданными кинематической схемой и параметрами механической части: 1. Записать уравнения движения с сопутствующей нелинейностью. 2. Для идеализированной линейной системы преобразовать исходные уравнения к векторно-матричной форме и записать выражения для передаточных функций гиросистемы: а) как объекта управления. б) как объекта стабилизации. 3. Осуществить оптимизацию параметров упруго-диссипативной связи динамических элементов гиросистемы по критерию min max ∣W j ∣ 4. Построить АЧХ механической части гиросистемы с оптимальными параметрами μ* и C*. 5. Осуществить синтез цепи обратной связи из условия заданной статической точности и необходимых запасов устойчивости. Построить ЛЧХ разомкнутой цепи. 6. Построить переходный процесс по интересующим координатам при действии постоянного возмущающего момента. 7. Построить АЧХ замкнутой гиросистемы. 8. Построить структурную схему гиросистемы с сопутствующей нелинейностью и преобразовать ее к одноконтурной, выделив нелинейный элемент и приведенную линейную часть. Записать выражение для передаточной функции приведенной линейной части. 9. Обосновать возможность применения метода гармонической линеаризации. Построить ЛАЧХ приведенной линейной части. 10. Осуществить гармоническую линеаризацию нелинейной системы. Записать условие амплитудно-фазового баланса. 11. Построить АФХ приведенной линейной части и инверсную характеристику гармонически - линеаризованного нелинейного элемента. 12. Определить параметры периодического решения. Исследовать их устойчивость. 13. Численным методом решить нелинейные уравнения, полученные в п. 1. Записать переходный процесс. Определить параметры автоколебаний. 14. Сравнить результаты полученные по п.п. 12 и 13. 15. Сделать выводы о влиянии сопутствующей нелинейности на устойчивость гиросистемы.
Характеристики курсовой работы
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Просмотров
56
Размер
665,74 Kb
Список файлов
Курсовой гироскоп.pdf

Друзья, спасибо за доверие! Если вам понравилась работа – поставьте 5⭐ и напишите отзыв. Это поможет другим студентам, а мне даст силы делать ещё больше качественных материалов для вас 🔥
 anhyeuem
anhyeuem
16 мая 2021 в 03:03
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!
Отзывы на другие работы автора
Отзыв
ДМ1519 - Проектирование привода цепного транспортера с двухступенчатым цилиндрическим редуктором выполненным по развернутой схеме
Есть недочёты, хорошо подходит как база для выполнения аналогичного варианта курсача

Отзыв
Сборочная размерная цепь + Подетальная размерная цепь
Были замечания, но автор все быстро исправил, теперь все отлично.

Отзыв
Плоская и пространственная статика
Есть небольшая путаница с углами из условий, которая может влиять на численный ответ, и подобные мелкие ошибки, в остальном всё хорошо

Отзыв
Кратные и криволинейные интегралы
есть ошибка в 5 номере и преподаватели уже начинают палить что эта работа списана

Отзыв
Отчет по производственной практике - Композиционные материалы - Предприятие НИИ СМ МГТУ им. Н.Э. Баумана
Спасибо! Изложение краткое и конструктивное, лишней информации нет. Помогло при составлении отчета



















