ДЗ 1: Кинематика. Прямая и обратная задача о положении и скорости вариант 7
Описание
Условие задания «Управление роботами» ч.1 (Кинематика)
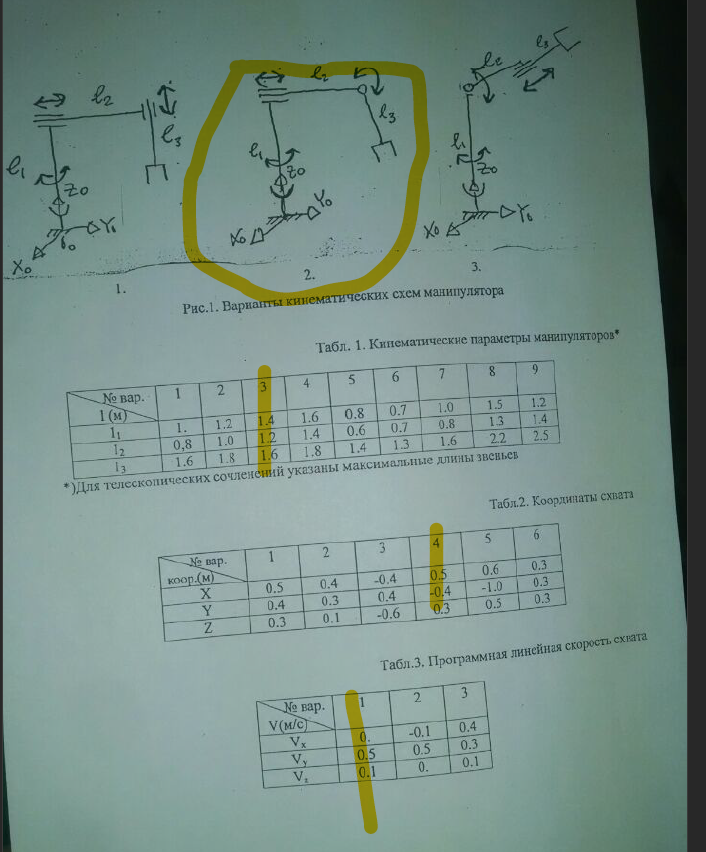
Для заданной кинематической схемы манипулятора (рис.1) требуется:
1. Построить системы координат звеньев манипулятора в соответствии с алгоритмом Денавнта-Хартенберга. Составить таблицу кинематических параметров манипулятора. При построении систем координат указать положение начала систем координат всех звеньев Oij , направление осей хi и zi а также обозначить на схеме ненулевые кинематические параметры и направление их измерения.
2. А общем виде решить:
- прямую задачу о положении;
- обратную задачу о положении.
Получить соответствующие аналитические выражения с учетом конкретных значений параметров манипулятора. Если обратная задача о положении не решается аналитически, использовать итерационные методы. Длины звеньев заданы в табл.1, положение схвата определено его декатовыми координатами, указанными в табл.2. Ориентация схвата не учитывается.
3. В общем виде решить:
- прямую задачу о скорости;
- обратную задачу о скорости.
При решении прямой задачи о скорости требуется составить матрицу Якоби для данного манипулятора, а также выписать выражении для компонентов скорости схвата. Получить соответствующие аналитические выражения с учетом конкретных ззначений параметров манипулятора. Обратную задачу о скорости решить для конфигурации манипулятора, полученной в результате решения обратной задачи о положении (одной из конфигураций, если решение неоднозначно). Линейная скорость схвата указана в табп.3. Угловую скорость скорость не учитывать.
Номер кинематической схемы и номера вариантов в таблицах вычисляются следующим образом. Каждому студенту присваевается упорядоченная пара чисел (6, n), где g - номер группы (81, ...), n - порядковый номер студента в списке группы, n Е { х,2,3,... }
Тогда:
1. Номер кинематической схемы — ((g + n) °/о 3) + 1
2. Номер варианта из табл. 1 = ((g + n) / 4) % 9 + 1
3. Номер варианта из табл.2 = (n °/о 6) + 1
4. Номер вариаггга из та6л.3 = (n % 3) + 1
здесь k / m- целочисленное деление (11 / 2 = 5), k % m- остаток от деления (11 % 2 = 1)
Решение представлено для данной комбинации
![]()
Для заданной кинематической схемы манипулятора (рис.1) требуется:
1. Построить системы координат звеньев манипулятора в соответствии с алгоритмом Денавнта-Хартенберга. Составить таблицу кинематических параметров манипулятора. При построении систем координат указать положение начала систем координат всех звеньев Oij , направление осей хi и zi а также обозначить на схеме ненулевые кинематические параметры и направление их измерения.
2. А общем виде решить:
- прямую задачу о положении;
- обратную задачу о положении.
Получить соответствующие аналитические выражения с учетом конкретных значений параметров манипулятора. Если обратная задача о положении не решается аналитически, использовать итерационные методы. Длины звеньев заданы в табл.1, положение схвата определено его декатовыми координатами, указанными в табл.2. Ориентация схвата не учитывается.
3. В общем виде решить:
- прямую задачу о скорости;
- обратную задачу о скорости.
При решении прямой задачи о скорости требуется составить матрицу Якоби для данного манипулятора, а также выписать выражении для компонентов скорости схвата. Получить соответствующие аналитические выражения с учетом конкретных ззначений параметров манипулятора. Обратную задачу о скорости решить для конфигурации манипулятора, полученной в результате решения обратной задачи о положении (одной из конфигураций, если решение неоднозначно). Линейная скорость схвата указана в табп.3. Угловую скорость скорость не учитывать.
Номер кинематической схемы и номера вариантов в таблицах вычисляются следующим образом. Каждому студенту присваевается упорядоченная пара чисел (6, n), где g - номер группы (81, ...), n - порядковый номер студента в списке группы, n Е { х,2,3,... }
Тогда:
1. Номер кинематической схемы — ((g + n) °/о 3) + 1
2. Номер варианта из табл. 1 = ((g + n) / 4) % 9 + 1
3. Номер варианта из табл.2 = (n °/о 6) + 1
4. Номер вариаггга из та6л.3 = (n % 3) + 1
здесь k / m- целочисленное деление (11 / 2 = 5), k % m- остаток от деления (11 % 2 = 1)
Решение представлено для данной комбинации
Характеристики домашнего задания
Предмет
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Номер задания
Вариант
Программы
Просмотров
11
Качество
Идеальное компьютерное
Размер
4,98 Mb
Список файлов
ДЗ_1_защ.docx
ДЗ_1_защ.pdf
Буду благодарен вашим отзывам)
 gg007361
gg007361
24 декабря 2024 в 15:45
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!
Отзывы на другие работы автора
Отзыв
Курсовой проект ТММ Проектирование и исследование механизмов поперечно-строгального станка с качающейся кулисой (Вариант 4А)
Всё отоичлично. на 4 защатился



















