Курсовая работа: Основные теоремы динамики системы материальных точек и дифференциальные уравнения движения твердого тела
Описание
РЕФЕРАТ
Отчёт о курсовой работе 23 с., 6 рис., 4 источника, 0 прил.
ПЛАНЕТАРНЫЙ РЕДУКТОР, ГРУЗОВАЯ ЛЕБЁДКА, ПРИВЕДЁННЫЙ МОМЕНТ ИНЕРЦИИ, НАТЯЖЕНИЕ ТРОСА, ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК
Объектом исследования является механическая система грузовой лебёдки на базе планетарного редуктора.
Цель работы − кинематический и динамический расчёт редуктора 6.1 с грузом 2: определение передаточного числа, приведённого момента инерции, установившейся угловой скорости, натяжения троса, условия качения без проскальзывания и сил взаимодействия шестерён.
В работе использованы три общие теоремы динамики системы материальных точек: об изменении количества движения (для определения реакций внешних связей), об изменении кинетической энергии (для вывода дифференциального уравнения движения ведущего вала) и об изменении кинетического момента (для определения сил взаимодействия в зубчатых зацеплениях и натяжения троса).
В работе произведён расчёт редуктора 6.1 с грузом 2, были определены: передаточное число, приведённый момент инерции, установившаяся угловая скорость, натяжения троса, условие качения без проскальзывания и сила взаимодействия шестерней. А также построены графики зависимости натяжения троса и угловой скорости от времени , .
Полученные динамические модели могут быть использованы при проектировании грузовых лебёдок с планетарным редуктором для обеспечения устойчивого подъёма груза по наклонной плоскости без проскальзывания.
СОДЕРЖАНИЕ
1 ПРИМЕНЕНИЕ ТЕОРЕМЫ ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ. 8
1.1 Определение дифференциального уравнения движения ведущего вала. 8
1.2 Определение закона изменения угловой скорости ведущего вала. 14
1.3 Определение угловой скорости установившегося движения. 14
2 ПРИМЕНЕНИЕ ТЕОРЕМЫ ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА СИСТЕМЫ.. 16
2.1 Сила взаимодействия между двумя сцепленными шестерёнками. 16
2.2 Определение силы натяжения троса. 17
3 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА.. 19
3.1 Определение силы реакции наклонной плоскости. 19
3.2 Определение коэффициента трения скольжения. 19
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ.. 23
ВВЕДЕНИЕ
Динамика системы материальных точек и движение твердого тела представляют собой важнейшие разделы теоретической механики, в которых изучаются закономерности механического движения под воздействием сил. Ключевая задача динамики − установить связь между характеристиками движения тел и приложенными силами. Здесь особую роль играют общие теоремы динамики, позволяющие лучше понять физические процессы и эффективно решать прикладные задачи.
Среди них выделяются теорема об изменении кинетической энергии и теорема об изменении кинетического момента системы. Они не только раскрывают фундаментальные законы сохранения энергии и момента импульса, но и служат основой для вывода уравнений движения как дискретных систем точек, так и сплошных тел.
Теорема об изменении кинетической энергии устанавливает связь между работой внешних и внутренних сил и изменением энергетического состояния системы, что особенно ценно при анализе сложных движений и переходов между разными формами механической энергии. Теоремы о кинетическом моменте позволяют изучать вращательное движение тел, в том числе твердых, и напрямую связаны с выводом дифференциальных уравнений движения.
Цель данной курсовой работы – применить основные теоремы динамики механической системы к анализу динамических характеристик сложной системы «лебёдка».
Определить:
1) используя теорему об изменении кинетической энергии для механической системы:
- дифференциальное уравнение движения ведущего вала 1;
- закон изменения угловой скорости вала 1, движущегося из состояния покоя до установившегося движения. Привести график этой зависимости;
- угловую скорость установившегося движения;
2) используя теорему об изменении кинетического момента системы:
- силы взаимодействия между двумя сцепленными шестернями (по выбору);
- закон изменения натяжения троса в зависимости от времени и его установившееся значение;
3) из уравнений движения груза по наклонной плоскости:
- силу реакции наклонной плоскости;
- коэффициент трения скольжения, обеспечивающий качение груза по наклонной плоскости без скольжения.
Дано:
R3 = 0,08 м; R4 = 0,1 м; R6 = 0,08 м; J1-3 = 2 кг ∙ м2; J4-6 = кг ∙ м2; J2-7 = 4 кг ∙ м2; m4-6 = 0,8 кг; mгр = 6 кг; ρ = 0,4 м; fтр.к = 0,02 м; R = 0,5 м; r = 0,4 м; α = 15 ; rб = 0,1R; M1 = 1,2M0.
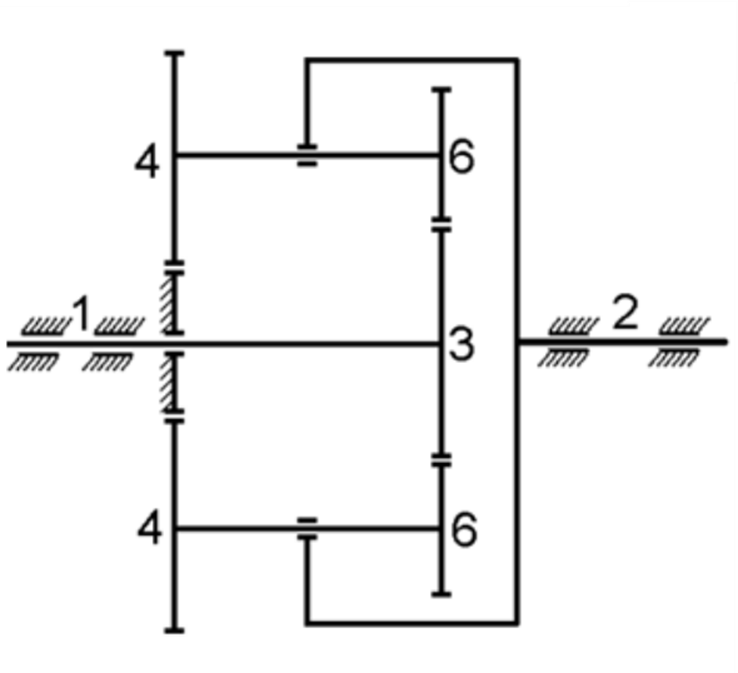
Рисунок 1 – Схема грузовой лебёдки
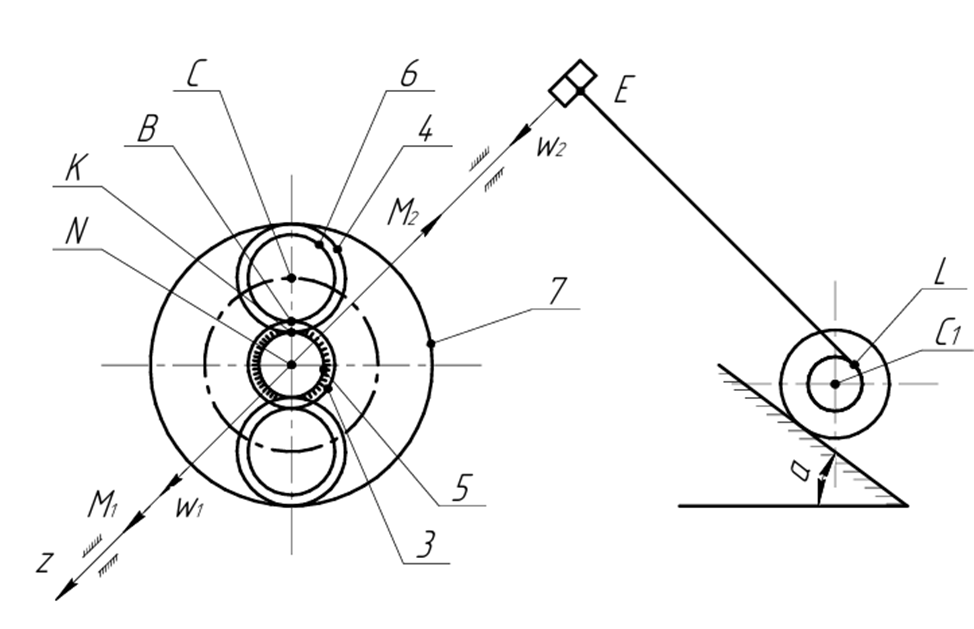
Рисунок 2 – Вид с боку схемы механической системы «лебёдка» и поднимаемого груза
 БГТУ
БГТУ all_at_700
all_at_700
















