Курсовая работа: Курсовая работа - Вариант 15 вариант 15
Описание
Цели работы
- Изучить варианты математического описания динамической системы
- Исследовать устойчивость динамической системы, используя различные формы представления и критерии
- Научиться оценивать качество динамической системы
Описание системы
Рассматривается система управления скоростью движения кресла на колесах поворотами головы. Датчики скорости, закрепленные на головном уборе, формируют выходные сигналы, пропорциональные амплитуде головы. Датчики установлены под углами 900, так что человек может отдать команду на движение вперед, назад, вправо, влево. Структурная схема системы управления антенной представлена на рисунке 1.
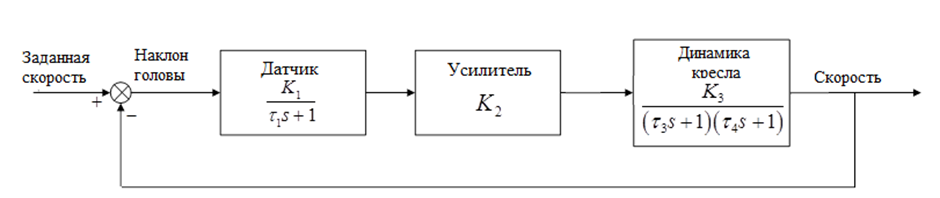
Рисунок 1 – Структурная схема системы управления движением кресла

Задание к расчету
- Описать систему в стандартной форме представления в пространстве состояний.
- Найти переходную матрицу.
- Оценить управляемость и наблюдаемость системы.
- Сделать обратный переход – от модели в пространстве состояний к передаточной функции.
- Найти нули и полюсы передаточной функций.
- Найти переходные функции разомкнутой и замкнутой системы.
- Найти импульсные характеристики разомкнутой и замкнутой системы.
- Определить устойчивость замкнутой системы при заданных параметрах.
- Определить предельно допустимое значение коэффициента передачи усилителя, исходя из соображений устойчивости.
- Выбрать коэффициент передачи усилителя , обеспечивающий устойчивость системы.
- Исследовать возможность обеспечить для замкнутой системы время переходного процесса с и перерегулирование % (изменением коэффициента передачи усилителя ). Если заданные характеристики обеспечить невозможно, выбрать , обеспечивающий близкие к требуемым характеристики переходного процесса.
Далее при выбранном :
- Построить переходные функции разомкнутой и замкнутой системы.
- Построить импульсные характеристики разомкнутой и замкнутой системы.
- Построить АФЧХ и ЛАФЧХ для разомкнутой и замкнутой систем.
- Оценить управляемость и наблюдаемость системы.
- Для замкнутой системы, оценить:
16.1. установившуюся ошибку;
16.2. качество переходного процесса по расположению нулей и полюсов передаточной функции;
16.3. запасы устойчивости.
Файлы условия, демо
Характеристики курсовой работы
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаВариант
Программы
Просмотров
23
Качество
Идеальное компьютерное
Размер
637,63 Kb
Список файлов
Курсовая Работа.docx

 drawing
drawing
30 августа 2022 в 22:19
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!
Отзывы на другие работы автора

Отзыв
Для горизонтального трубопровода, размеры которого указаны в таблице, определить расход Бугуруслановской нефти при температуре t = 18° C, если показание манометра PM. Коэффициент сопротивления вентиля и сопла соответственно равны ζв=4, ζс=0,6. Трубы
Решение правильное, только почему-то вместо увеличения d до 200 мм его увеличили только на 10%, но это не критично и легко пересчитывается

Отзыв
Во время осады Севастополя в 1942 году фашисты применили для подавления батареи 305-мм орудий свою самую большую пушку Дора К(Е). Масса бетонобойного снаряда была 7100 кг, начальная скорость – 720 м/с, а масса всего орудия, установленного на железнод
Выполнено качественно, все подписано и дополнительно пояснено. У преподавателя вопросов не возникло
Отзыв
Щитовой затвор должен автоматически опрокидываться для пропуска воды при уровне последней Н1≥6 м. Щит поворачивается на цапфах О. Дано: d=0,4 м, f=0,2 м, В=8м, α=60°, Н2=3 м. Найти: 1) на каком расстоянии x должна быть расположена ось поворота щита
Лучшее решение этой задачи, да еще и бесплатное. Супер понятно, спасибо
Отзыв
Газовый цикл
Преподаватель принял без замечаний

Отзыв
Задача 7-6
Всё отлично



















