Оптимизация управления мехатронной системы Робота «Универсал-5» в условиях неопределённости на основе конфликтной анизотропии (КАН)
Бестселлер
-41%
Описание
Задание
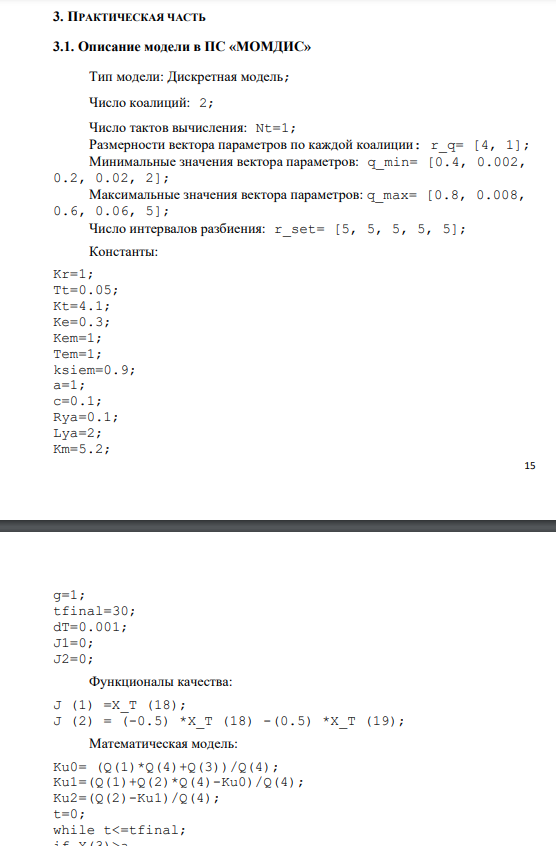
Провести исследование системы управления роботом. Найти оптимальный вектор управления с точки зрения показателей качества. Провести моделирование при варьировании параметров.
ВВЕДЕНИЕ
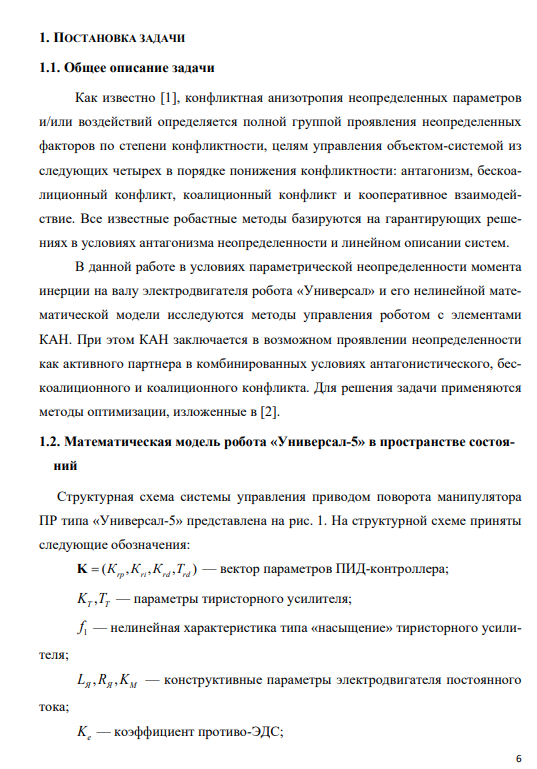
Большую популярность завоёвывают решения по автоматизации производства на базе производственных роботов, позволяющих обеспечить полный цикл обработки с высокой производительностью и точностью, избежать перерывов и производственных ошибок, свойственных человеку. Одним из ярких примеров является промышленный робот (ПР) «Универсал – 5». Многоцелевой робот «Универсал-5» применяется для автоматизации погрузочно-разгрузочных работ, обслуживания различного технологического оборудования, межоперационного транспортирования объектов обработки и выполнения других вспомогательных операций. Для управления промышленным роботом в данной работе применяются принципы управления на основе стабильно-эффективного компромисса (СТЭК). Принципы управления ММС на основе стабильных, эффективных решений и элементов СТЭК находят широкое применение в практике управления техническими, экономическими, биомедицинскими и другими системами
![]()
![]()
![]()
Провести исследование системы управления роботом. Найти оптимальный вектор управления с точки зрения показателей качества. Провести моделирование при варьировании параметров.
ВВЕДЕНИЕ
Большую популярность завоёвывают решения по автоматизации производства на базе производственных роботов, позволяющих обеспечить полный цикл обработки с высокой производительностью и точностью, избежать перерывов и производственных ошибок, свойственных человеку. Одним из ярких примеров является промышленный робот (ПР) «Универсал – 5». Многоцелевой робот «Универсал-5» применяется для автоматизации погрузочно-разгрузочных работ, обслуживания различного технологического оборудования, межоперационного транспортирования объектов обработки и выполнения других вспомогательных операций. Для управления промышленным роботом в данной работе применяются принципы управления на основе стабильно-эффективного компромисса (СТЭК). Принципы управления ММС на основе стабильных, эффективных решений и элементов СТЭК находят широкое применение в практике управления техническими, экономическими, биомедицинскими и другими системами
Характеристики курсовой работы
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Просмотров
46
Размер
745,37 Kb
Список файлов
Оптимизация управления мехатронной системы Робота _Универсал-5_ в условиях неопределенности на основе конфликтной анизотропии (КАН).pdf

Друзья, спасибо за доверие! Если вам понравилась работа – поставьте 5⭐ и напишите отзыв. Это поможет другим студентам, а мне даст силы делать ещё больше качественных материалов для вас 🔥
 anhyeuem
anhyeuem
09 апреля 2021 в 02:18
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!



















