Алгоритм конфликтно-оптимального целераспределения-ранжирования звеньев летательных аппаратов (Х= 0, 0.1, 0.5, 30, 29, 22 км)
-41%
Описание
Задание
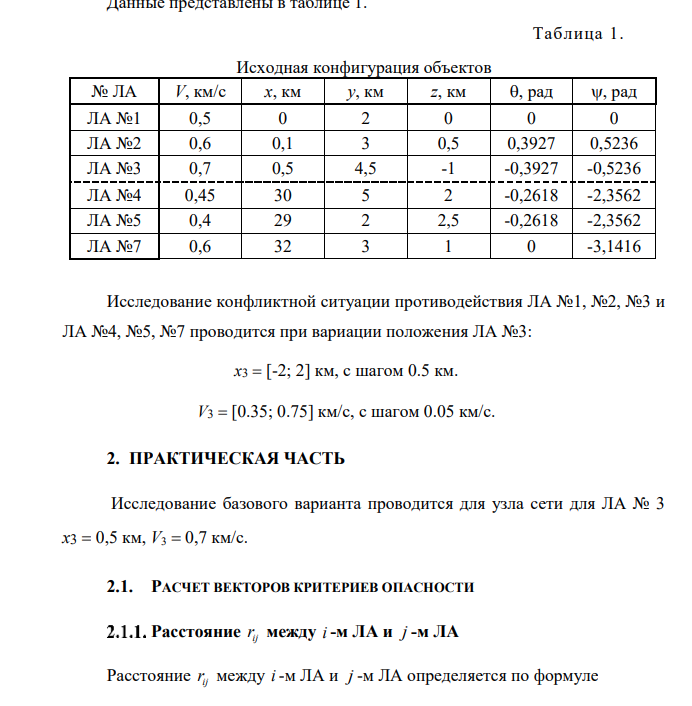
Провести полное исследование базового варианта с получением всех промежуточных матриц и результата целераспределения (ЦР). Определить все типы матриц целераспределения по заданным узлам сети и представить результат вариации положения одного из ЛА в графическом виде на плоскости
ВВЕДЕНИЕ
Целью работы является исследование алгоритмов конфликтнооптимального целераспределения летательных аппаратов и алгоритма ранжирования звеньев летательных аппаратов, и получение диаграммы влияния параметров одного из ЛА на вид матрицы целераспределения. Исходя из цели работы, можно выделить несколько основных задач. Проведение полного исследования базового варианта с получением всех промежуточных матриц и результата целераспределения. Получение всех типов матриц целераспределения по заданным узлам сети и представления результата вариации положения одного из ИП в графическом виде на плоскости. По полученному результату сделать выводы влияния изменения положения одного из ЛА на результат целераспределения.
![]()
Провести полное исследование базового варианта с получением всех промежуточных матриц и результата целераспределения (ЦР). Определить все типы матриц целераспределения по заданным узлам сети и представить результат вариации положения одного из ЛА в графическом виде на плоскости
ВВЕДЕНИЕ
Целью работы является исследование алгоритмов конфликтнооптимального целераспределения летательных аппаратов и алгоритма ранжирования звеньев летательных аппаратов, и получение диаграммы влияния параметров одного из ЛА на вид матрицы целераспределения. Исходя из цели работы, можно выделить несколько основных задач. Проведение полного исследования базового варианта с получением всех промежуточных матриц и результата целераспределения. Получение всех типов матриц целераспределения по заданным узлам сети и представления результата вариации положения одного из ИП в графическом виде на плоскости. По полученному результату сделать выводы влияния изменения положения одного из ЛА на результат целераспределения.
Характеристики курсовой работы
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Просмотров
10
Размер
1,13 Mb
Список файлов
Алгоритм конфликтно-оптимального целераспределения-ранжирования звеньев летательных аппаратов (Х= 0_ 0.1_ 0.5_ 30_ 29_ 22 км).pdf

Друзья, спасибо за доверие! Если вам понравилась работа – поставьте 5⭐ и напишите отзыв. Это поможет другим студентам, а мне даст силы делать ещё больше качественных материалов для вас 🔥
 anhyeuem
anhyeuem
09 апреля 2021 в 01:31
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!
Отзывы на другие работы автора
Отзыв
ДМ1519 - Проектирование привода цепного транспортера с двухступенчатым цилиндрическим редуктором выполненным по развернутой схеме
Есть недочёты, хорошо подходит как база для выполнения аналогичного варианта курсача

Отзыв
Сборочная размерная цепь + Подетальная размерная цепь
Были замечания, но автор все быстро исправил, теперь все отлично.

Отзыв
Плоская и пространственная статика
Есть небольшая путаница с углами из условий, которая может влиять на численный ответ, и подобные мелкие ошибки, в остальном всё хорошо

Отзыв
Кратные и криволинейные интегралы
есть ошибка в 5 номере и преподаватели уже начинают палить что эта работа списана

Отзыв
Отчет по производственной практике - Композиционные материалы - Предприятие НИИ СМ МГТУ им. Н.Э. Баумана
Спасибо! Изложение краткое и конструктивное, лишней информации нет. Помогло при составлении отчета



















