Задача 2: Динамика вращательного движения вариант 14
-77%
Описание
Вариант 14 - ДЗ №2 - Динамика вращательного движения
Зачтено на максимальный балл 💥 💥 💥
Спасибо за покупку 🥰🥰🥰
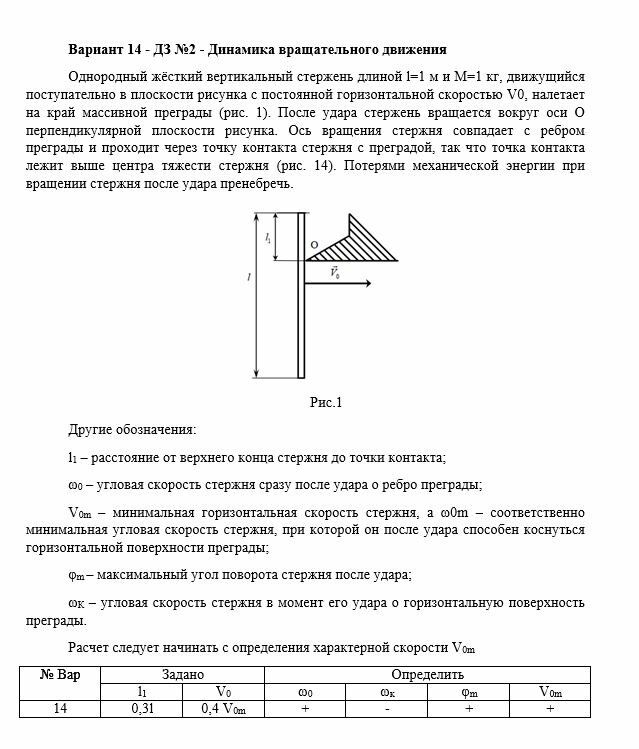
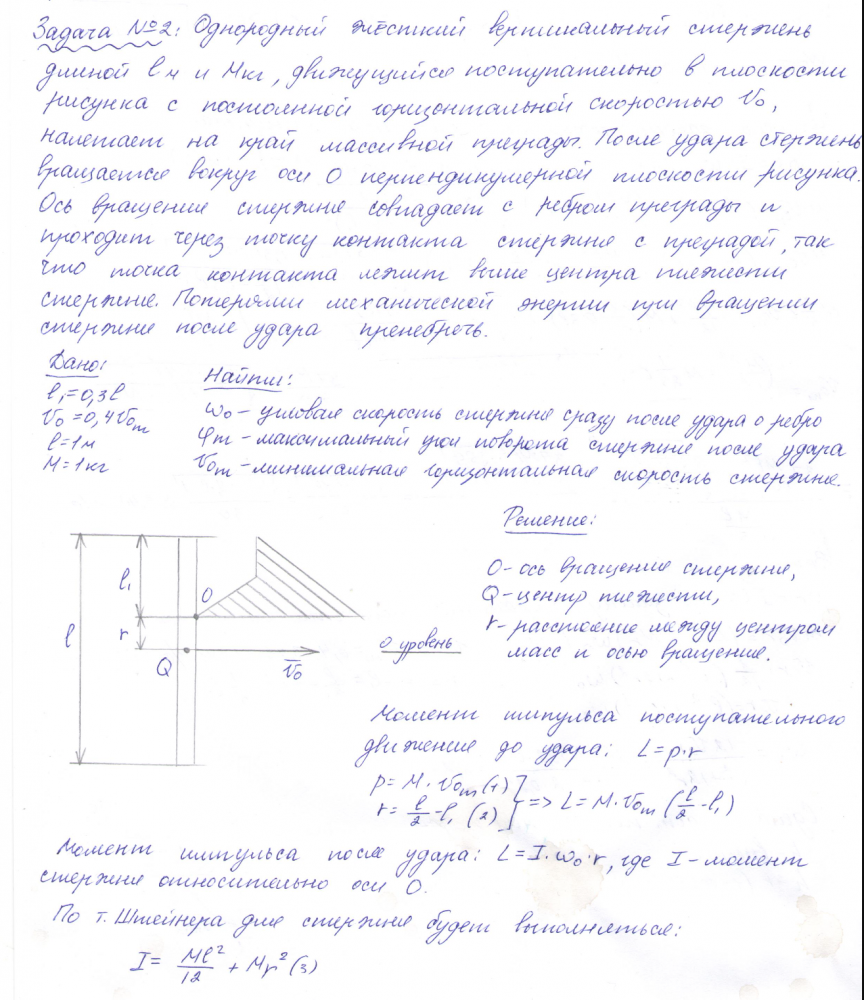 Однородный жёсткий вертикальный стержень длиной l=1 м и М=1 кг, движущийся поступательно в плоскости рисунка с постоянной горизонтальной скоростью V0, налетает на край массивной преграды (рис. 1). После удара стержень вращается вокруг оси O перпендикулярной плоскости рисунка. Ось вращения стержня совпадает с ребром преграды и проходит через точку контакта стержня с преградой, так что точка контакта лежит выше центра тяжести стержня (рис. 14). Потерями механической энергии при вращении стержня после удара пренебречь.
Однородный жёсткий вертикальный стержень длиной l=1 м и М=1 кг, движущийся поступательно в плоскости рисунка с постоянной горизонтальной скоростью V0, налетает на край массивной преграды (рис. 1). После удара стержень вращается вокруг оси O перпендикулярной плоскости рисунка. Ось вращения стержня совпадает с ребром преграды и проходит через точку контакта стержня с преградой, так что точка контакта лежит выше центра тяжести стержня (рис. 14). Потерями механической энергии при вращении стержня после удара пренебречь. Другие обозначения:
l1 – расстояние от верхнего конца стержня до точки контакта;
ω0 – угловая скорость стержня сразу после удара о ребро преграды;
V0m – минимальная горизонтальная скорость стержня, а ω0m – соответственно минимальная угловая скорость стержня, при которой он после удара способен коснуться горизонтальной поверхности преграды;
φm – максимальный угол поворота стержня после удара;
ωК – угловая скорость стержня в момент его удара о горизонтальную поверхность преграды.
Расчет следует начинать с определения характерной скорости V0m
Характеристики решённой задачи
Предмет
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Номер задания
Вариант
Просмотров
71
Размер
1,23 Mb
Список файлов
Вариант 14 - ДЗ №2 - Динамика вращательного движения..pdf

Друзья, спасибо за доверие! Если вам понравилась работа – поставьте 5⭐ и напишите отзыв. Это поможет другим студентам, а мне даст силы делать ещё больше качественных материалов для вас 🔥
 anhyeuem
anhyeuem
31 марта 2023 в 08:44
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!
Отзывы на другие работы автора
Отзыв
ДМ1519 - Проектирование привода цепного транспортера с двухступенчатым цилиндрическим редуктором выполненным по развернутой схеме
Есть недочёты, хорошо подходит как база для выполнения аналогичного варианта курсача

Отзыв
Сборочная размерная цепь + Подетальная размерная цепь
Были замечания, но автор все быстро исправил, теперь все отлично.

Отзыв
Плоская и пространственная статика
Есть небольшая путаница с углами из условий, которая может влиять на численный ответ, и подобные мелкие ошибки, в остальном всё хорошо

Отзыв
Кратные и криволинейные интегралы
есть ошибка в 5 номере и преподаватели уже начинают палить что эта работа списана

Отзыв
Отчет по производственной практике - Композиционные материалы - Предприятие НИИ СМ МГТУ им. Н.Э. Баумана
Спасибо! Изложение краткое и конструктивное, лишней информации нет. Помогло при составлении отчета



















